1.本发明涉及汽车照明领域,尤其涉及一种实现灯具间通讯的系统及点灯方法。
背景技术:
2.车灯设计之初的目的只有照明指示的作用,但是随着经济的快速发展,市场对汽车绚丽性的需求与日俱增,车灯做为功能性的外观件,在提高外观的绚丽性上面往往可以起到决定性的作用,于是越来越复杂的动画效果出现在了市场上的高端车型上面,最普遍的当属汽车led(发光二极管)转向灯的流水效果,这种效果可以给人眼一种很平滑的转向效果,看起来尤为舒服。
3.目前的汽车车灯led(发光二极管)转向的流水效果存在一个累计误差现象,累计误差即由于计时器以及晶振的误差导致系统长时间持续的工作后出现流水灯翼灯与箱灯流水紊乱的现象,可能会导致翼灯比箱灯提早亮灯,或者箱灯未全部亮灯完毕翼灯就已经开始亮灯,该设计是采用了一个可以持续计数的芯片来驱动移位寄存器进行流水控制,由于计数芯片本身的误差,以及没有重置计数的动作,长久下去,会出现累计误差导致流水紊乱的现象。为了消除累计误差的现象,目前存在一种设计,即通过翼侧一个单独的电子控制单元和led驱动器组合以及箱侧一个单独的电子控制单元和led驱动器组合,然后两个灯具分别连接到整车端bcm(车身控制模块),使用can通信、lin通信或者硬件通信的方式与bcm端实现信息交互。转向信号每次由低变高后都会重置一次系统,这样计数器每次都可以被重置,则不会出现累计误差的现象。但是这种设计方案无法保证翼侧与箱侧的转向灯可以进行直接通讯和控制,所以为了做到消除累计误差,每次转向灯过来后,都需要重启一下系统,会导致系统响应时间增加。当然为了解决系统响应时间的问题,也可以通过bcm供一个电源给车灯使翼灯和箱灯的电子控制单元随时都处于活跃状态,但是这种缺陷也很明显,即会导致更高的功耗。后两种设计虽然都在解决累计误差的现象,但是由于翼灯与箱灯之间没有进行信息交互,也不存在主从控制,整个系统只能由bcm去控制,显得异常笨重。
技术实现要素:
4.为解决上述问题,本发明提供一种实现灯具间通讯的系统及点灯方法,在做到消除累计误差的同时,也可以保证更低的延迟,更低的功耗和更低的成本,同时也可以做到翼灯与箱灯的状态交互和主从控制,从而可以保证了系统更灵活及更安全,解决了背景技术中出现的问题。
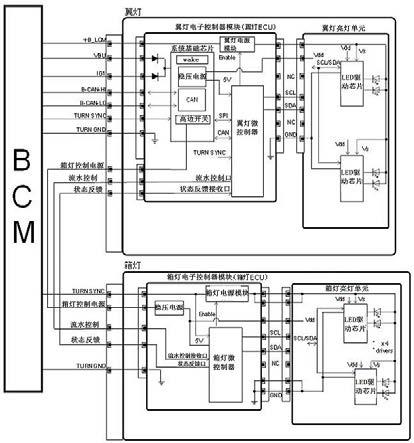
5.本发明的目的是提供一种实现灯具间通讯的系统,包括作为主控制端的翼灯、从控制端的箱灯,以及翼灯与箱灯之间的通讯模块;翼灯包括翼灯电子控制器模块、翼灯亮灯单元和翼灯通信模块;翼灯电子控制器模块对外与车身控制器bcm连接进行通信协议解析,电源管理与转换,对内控制整个系统;翼灯亮灯单元,受翼灯电子控制器模块控制,进行翼灯侧流水效果的顺序点亮、呼
吸点亮方式,实现动态照明的控制和呈现,并将被控制单元的各种错误诊断信息上报至翼灯电子控制器模块模块;翼灯通信模块,连接翼灯电子控制器模块和翼灯亮灯单元,实现翼灯电子控制器模块与翼灯亮灯单元之间的通信;箱灯包括箱灯电子控制器模块、箱灯亮灯单元和箱灯通信模块;箱灯电子控制器模块的输出端与箱灯亮灯单元连接,负责控制箱灯亮灯单元,其中箱灯电子控制器模块的输入端与翼灯电子控制器模块的输出端连接,受翼灯电子控制器模块器控制,并实时反馈箱灯的箱灯电子控制模块以及箱灯亮灯单元的整个状态给翼灯电子控制器模块;箱灯亮灯单元,受箱灯电子控制器模块控制,进行流水效果的顺序点亮、呼吸点亮方式,实现箱灯动态照明的控制和呈现,并上报错误诊断信息至箱灯电子控制器模块,箱灯电子控制器模块会进一步反馈给翼灯电子控制器模块;箱灯通信模块,连接箱灯电子控制器模块和箱灯亮灯单元,为实现箱灯电子控制器模块与箱灯亮灯单元之间的通信;翼灯与箱灯之间的通讯模块包括作为电源管理线的箱灯控制电源线、翼灯控制箱灯的流水控制信号线和箱灯反馈给翼灯的状态反馈信号线,实现箱灯电子控制器模块与翼灯电子控制器模块的连接,实现作为主灯的翼灯对作为从灯的箱灯的控制;箱灯电子控制器模块包括有箱灯电源模块、箱灯的稳压电源和箱灯微控制器;箱灯控制电源的输入端与翼灯电子控制器模块的高边开关连接,箱灯控制电源的输出端与箱灯电子控制器模块的稳压电压连接;箱灯控制电源由kl15电源以及kl30备用电源通过翼灯电子控制器模块的高边开关输入,给到箱灯的稳压电源后一路电稳定输出5v电平驱动箱灯微控制器,箱灯微控制器通过使能线控制由turn sycn供电的箱灯电源模块给箱灯亮灯单元的led驱动芯片和led功率原器件供电,以及另一路电给箱灯亮灯单元单元上的led驱动芯片内部的i
²
c通讯模块进行供电;箱灯在turn sync为低,或者在长时间没有转向需求后翼灯电子控制器模块进入睡眠模式,翼灯的翼灯微控制器会通过高边开关切断箱灯控制电源,箱灯不用工作并处于无功耗状态中;流水控制信号线和状态反馈信号线实现翼灯与箱灯间信息交互,流水控制信号线的一端连接翼灯微控制器的流水控制口,另一端连接箱灯微控制器的流水控制接收口,接收转向信号后,翼灯微控制器通过流水控制信号线将流水控制信号电平拉高,箱灯微控制器识别turn sync转向信号,并通过流水控制接收口读取流水控制信号,当检测到turn sync以及流水控制信号电平都为高,通过i
²
c通信控制箱灯亮灯单元的led驱动芯片进行点灯动作;状态反馈信号线一端连接箱灯微控制器的状态反馈口,另一端连接翼灯微控制器的状态反馈接收口,当点灯正常时,箱灯微控制器通过状态反馈口将状态反馈线的状态反馈信号电平拉高,翼灯微控制器在检测到turn sync为高电平后,设置于翼灯微控制器内部的内部计时器会开始进行等待亮灯倒计时,翼灯微控制器持续性检测状态反馈信号,当计时结束且状态反馈接收口检测到的状态反馈信号电平为高时翼灯亮灯单元进行点灯动作;当有错误时箱灯通过状态反馈信号线随时反馈箱灯状态给翼灯,使系统进入保护模式。
6.进一步改进在于:所述翼灯微控制器内部的内部计时器在每次turn sync由低变高后会进行重置,且箱灯在每次turn sync由低变高后的点灯动作是由翼灯电子控制器模块控制,消除累计误差现象。
7.进一步改进在于:箱灯控制电源线实现翼灯对箱灯的电源控制,处于活跃状态或者休眠模式中的翼灯电子控制器模块没有完全掉电,无需重启系统,使整个系统做到快速唤醒并做到点灯低延迟的效果。
8.进一步改进在于:翼灯电子控制器模块,对外负责接收车身控制器bcm的控制信号,支持lin协议以及can协议,在不修改硬件pcb设计的前提下,实现通讯方式适配;翼灯电子控制器模块有三根主电源线,分别为 b_lcm线、 ig1线和vbu线,三者分别连接kl30电源、kl15电源、kl30备用电源;翼灯还包括有翼灯电源模块,翼灯电源模块由kl30电源供电,并受翼灯微控制器控制,负责给翼灯亮灯单元的功率原器件供电;连接kl15电源、kl30备用电源与箱灯电子控制器模块的连接采用高边开关,高边开关受翼灯微控制器的控制;翼灯还包括有翼灯稳压电源模块,翼灯稳压电源模块是由kl15电源与kl30备用电源供电,并稳定输出5v电平驱动翼灯微控制器模块,以及给翼灯亮灯单元上的led驱动芯片内部的i
²
c通讯模块进行供电。
9.进一步改进在于:所述箱灯电子控制器模块,对外受车身控制器bcm的turn sync信号控制,对内受翼灯电子控制器模块控制;箱灯控制电源由kl15电源以及kl30备用电源通过翼灯电子控制器模块的高边开关输入,给到稳压电源后稳定输出5v电平驱动箱灯电子控制器模块的箱灯微控制器模块,以及给箱灯亮灯单元单元上的led驱动芯片内部的i
²
c通讯模块进行供电;箱灯电源模块是由turn sycn供电,并给箱灯亮灯单元的功率原器件供电。
10.进一步改进在于:所述翼灯亮灯单元和箱灯亮灯单元均是由led驱动芯片以及led组成;翼灯电子控制器模块器或箱灯电子控制器模块发出指令为i
²
c通讯信号,i
²
c通讯信号包括scl,即i
²
c通信的时钟信号,与sda,即i
²
c通信的数据信号;i
²
c通讯信号在亮灯单元里led驱动芯片会与ecu进行信息交互,当需要点灯的时候,翼灯电子控制器模块或箱灯电子控制器模块只需负责发出点灯信号,led驱动芯片则会负责将led顺序点亮或者动态点亮;当led驱动芯片检测到led的开路,短路,过热,欠压等失效或错误时,会通过i
²
c通信告知翼灯电子控制器模块或箱灯电子控制器模块。
11.进一步改进在于:i
²
c通信总线与can差分总线相复用。
12.进一步改进在于:在点灯异常状态下,当翼灯出现led的开路,短路,过热,欠压失效或错误时led驱动芯片会通过i
²
c通信将这些异常告知翼灯电子控制器模块,翼灯电子控制器模块再通过can通信告知bcm翼灯的异常点;当箱灯出现led的开路,短路,过热,欠压失效或错误时,翼灯亮灯单元中的led驱动芯片会通过i
²
c通信将这些异常告知箱灯电子控制器模块,箱灯电子控制器模块会通过拉低状态反馈线的电平,告知翼灯电子控制器模块箱灯有异常,箱灯电子控制器模块再通
过can通信告知车身控制器bcm箱灯有异常;当车身控制器bcm接收到诊断异常后,如果长时间未做处理,在三个转向灯点亮周期的循环后,系统会自动关闭所有供电模块,包括关闭翼灯电源模块,箱灯控制电源,箱灯电源模块,这样整个系统会进入睡眠模式,有效保护车灯,并从外观发现车灯有损坏,提醒驾驶人员及时修理,确保安全。
13.一种点灯方法,包括有如前所述的实现灯具间通讯的系统,点灯正常状态下,start) 当turn sync变高的时候,(a)翼灯电子控制器模块会将流水控制的电平由低拉高;(b)然后箱灯电子控制器模块会检测到流水控制电平为高,则开始进行箱灯的点灯动作,箱灯的每个led的状态会按设计的时间间隔被切换为on的开启状态;(c)当箱灯的第一颗led被成功点亮后,箱灯会将状态反馈线由低拉高;(d)在turn sync变高且流水控制信号电平由低变高的时刻,翼灯电子控制器模块上的翼灯微控制器的内部计时器开始计时,等到计时器计时结束,且检测到状态反馈线电平为高时,翼灯开始进行点灯动作,翼灯的每个led的状态会按设计的时间间隔被切换为on的开启状态;直至整个流水点电亮动作结束,翼灯与箱灯的灯将会保持常亮;(e)直到turn sync由高变低,翼灯电子控制器模块与箱灯电子控制器模块的ecu会通过i
²
c通讯控制灯全部关闭,同时箱灯侧电源会被切断;后面会一直循环上述点灯步骤;由于翼灯微控制器内部的计时器在每次turn sync由低变高后会进行重置,且箱灯在每次turn sync由低变高后的点灯动作(a)到(b)是由翼灯电子控制器模块控制,这种只由翼灯主控开始点灯动作,且翼灯电子控制器模块内部计时器会被turn sync重置的控制方式可以消除累计误差现象。
14.本发明的有益效果:本发明是一种实现转向灯,尤其是流水效果转向灯,与控制模块之间可以进行控制以及实时状态交互的一种系统,其中翼灯为主控制端,箱灯为从控制端,翼灯电子控制器模块负责与车身控制器bcm端使用can通信进行信息交互,并可以给箱灯电子控制器模块进行供电,诊断以及控制。翼灯与箱灯之间可以进行状态的互相监控,任何一端有出现问题都会告知翼灯电子控制器模块的翼灯微控制器,并通过can通信发给车身控制器bcm,若车身控制器bcm长时间未做动作,系统会进入自我保护模式,进一步加强功能安全性。
15.在进行转向操作过程中,正常点灯的情况下,车身控制器bcm会发出turn sync转向信号给翼灯以及箱灯,在翼灯接收到转向信号后,翼灯微控制器控制其系统基础芯片内部的高边开关开启,并将kl15和kl30电源通过高边开关输出至箱灯控制电源线上,并通过流水控制信号线将流水控制信号电平拉高。在接收到箱灯控制电源后,箱灯电子控制器模块需要进行初始化,在进行短暂的初始化后,箱灯微控制器会识别turn sync转向信号,并通过流水控制接收口读取流水控制信号,如果检测到turn sync以及流水控制信号电平都为高,则会通过i
²
c通信控制箱灯亮灯单元的led驱动芯片进行点灯动作,在箱灯第一颗led亮起的时候,箱灯亮灯单元的led驱动芯片会通过i
²
c通信反馈给箱灯微控制器,如果检测到点灯正常,箱灯微控制器则会通过状态反馈口将状态反馈线的状态反馈信号电平拉高。翼灯微控制器在检测到turn sync为高电平后,设置于翼灯微控制器内部的内部计时器会
开始进行等待亮灯倒计时,期间翼灯微控制器会持续性检测状态反馈信号,当计时结束,并且状态反馈接收口检测到的状态反馈信号电平为高时,会通过i
²
c通信控制翼灯亮灯单元中的led驱动芯片进行点灯动作。这样在每次turn sync由低变高后,翼灯微控制器都会重置内部计时器,从而做到消除累计误差的现象,并且由于在整个系统工作的过程中,翼灯微控制器一直处于活跃状态,若长时间没有转向灯信号,翼灯微控制器可控制整个系统进入睡眠模式,但无论是在活跃状态或睡眠模式中,由于翼灯电子控制器模块并没有完全掉电,无需如现有技术重启系统,所以都可做到快速响应,从而达到低延迟的效果。
16.在转向灯工作的过程时,翼灯控制输出给箱灯工作的箱灯控制电源可以做到跟随turn sync,即在turn sync为低电平的时候,翼灯微控制器会通过高边开关切断箱灯控制电源,使箱灯处在无功耗状态,同样在转向灯长时间不使用的情况下,翼灯电子控制器模块会进入睡眠模式,当进入睡眠模式后,翼灯微控制器会通过高边开关切断箱灯控制电源,也可使箱灯处于无功耗状态。
17.由于整个灯的状态都可以通过翼灯通过can通讯反馈给车身控制器bcm,可以节省掉现有技术箱灯的can模块相关电路,以及车身控制器bcm的一路can,这样可以做到更低的成本。
18.如果在点灯过程中出现了异常,若是翼灯点灯异常,翼灯亮灯单元中的led驱动芯片会将异常通过i
²
c通报给翼灯微控制器,若是箱灯点灯异常,箱灯亮灯单元中的led驱动芯片会将异常通过i
²
c通报给箱灯电子控制模块的箱灯微控制器,箱灯微控制器再通过将状态反馈线将状态反馈信号电平拉低的方式告知翼灯微控制器,最终所有的异常都会通过翼灯微控制器通过can通讯告知车身控制器bcm,如果在等待三个循环后,车身控制器bcm并未做任何动作,翼灯将会切断整个系统的供电,使整个系统进入安全保护模式,从而更直观地告知驾驶者汽车车灯需要立刻修理,则可避免功能安全级别低的车灯出现在道路中的车辆上。
19.所以无论是正常点灯亦或是异常点灯状态中,翼灯与箱灯之间都处于时刻信息交互的状态中,本发明的箱灯控制电源线,以及流水控制、状态反馈的信号线,可使整个系统的控制做到更灵活以及更安全。
附图说明
20.图1是本发明的组成的系统框图图2是本发明的通讯逻辑的示意图,其中横轴为时间轴t。
具体实施方式
21.为了加深对本发明的理解,下面将结合实施例对本发明作进一步详述,该实施例仅用于解释本发明,并不构成对本发明保护范围的限定。
22.如图1
‑
2所示,本实施例提供一种实现灯具间通讯的系统及点灯方法,包括作为主控制端的翼灯、从控制端的箱灯,以及翼灯与箱灯之间的通讯模块;翼灯包括翼灯电子控制器模块,翼灯亮灯单元和翼灯通信模块,翼灯电子控制器模块对外与车身控制器bcm进行通信协议解析,电源管理与转换,对内控制整个系统;翼灯亮灯单元,受翼灯电子控制器模块控制,可进行翼灯侧流水效果的顺序点亮、
呼吸点亮等方式,实现动态照明的控制和呈现,并将被控制单元的各种错误诊断信息上报至翼灯电子控制器模块模块;翼灯通信模块,实现翼灯电子控制器模块与翼灯亮灯单元之间的通信。
23.箱灯包括箱灯电子控制器模块、箱灯亮灯单元和箱灯通信模块,箱灯电子控制器模块负责控制箱灯亮灯单元,箱灯电子控制器模块受翼灯电子控制器模块器控制,并实时反馈箱灯的箱灯电子控制模块以及箱灯亮灯单元的整个状态给翼灯电子控制器模块;箱灯亮灯单元,受箱灯电子控制器模块控制,可进行流水效果的顺序点亮、呼吸点亮等方式,实现箱灯动态照明的控制和呈现,并将箱灯亮灯单元的各种错误诊断信息上报至箱灯电子控制器模块,如上说明,箱灯电子控制器模块会进一步反馈给翼灯电子控制器模块;箱灯通信模块,为实现箱灯电子控制器模块与箱灯亮灯单元之间的通信。
24.翼灯电子控制器模块,对外负责接收车身控制器bcm的控制信号,本实施例可支持lin协议以及can协议(本实施例的图1中示出的为can协议),在不修改硬件pcb设计的前提下,可进行通讯方式适配;翼灯电子控制器模块有三根主电源线,分别为 b_lcm线、 ig1线和vbu线,三者分别连接kl30电源、kl15电源、kl30备用电源;翼灯电源模块由kl30供电,并受翼灯微控制器控制,负责给翼灯亮灯单元的led驱动芯片和led等功率原器件供电;高边开关是连接kl15电源、kl30备用电源与箱灯电子控制器模块的原器件,受翼灯电子控制器模块的微控制器的控制;翼灯的稳压电源模块是由kl15电源与kl30备用电源供电,并稳定输出5v电平驱动翼灯微控制器模块,以及给翼灯亮灯单元上的led驱动芯片内部的i
²
c通讯模块进行供电。箱灯电子控制器模块,对外受turn sync信号控制,对内受翼灯电子控制器模块控制,箱灯控制电源由kl15电源以及kl30备用电源通过翼灯电子控制器模块的高边开关输入,给到稳压电源后可稳定输出5v电平驱动箱灯微控制器模块,以及给箱灯亮灯单元单元上的led驱动芯片内部的i
²
c通讯模块进行供电;箱灯电源模块是由turn sycn供电,箱灯电源模块是受箱灯微控制器通过使能线(enable线)控制,并给箱灯亮灯单元的led驱动芯片和led等功率原器件供电。
25.所述翼灯亮灯单元和箱灯亮灯单元均是由led驱动芯片以及led组成;作为电子控制器模块的翼灯电子控制器模块器或箱灯电子控制器模块发出指令为i
²
c通讯信号,i
²
c通讯信号包括scl,即i
²
c通信的时钟信号,与sda,即i
²
c通信的数据信号;i
²
c通讯信号在亮灯单元里led驱动芯片会与电子控制器模块进行信息交互,当需要点灯的时候,翼灯电子控制器模块或箱灯电子控制器模块只需负责发出点灯信号,led驱动芯片则会负责将led顺序点亮或者动态点亮;当led驱动芯片检测到led的开路,短路,过热,欠压等失效或错误时,会通过i
²
c通信告知翼灯电子控制器模块或箱灯电子控制器模块;翼灯电子控制器模块 只需负责发出点灯信号,翼灯亮灯模块的led驱动芯片则会负责将led顺序点亮或者动态点亮;箱灯电子控制器模块 只需负责发出点灯信号,箱灯亮灯模块的led驱动芯片则会负责将led顺序点亮或者动态点亮。
26.此i
²
c通信总线可与can差分总线相复用,即图1中所示scl,即i
²
c通信的时钟信号,与sda,即i
²
c通信的数据信号,由于pcb设计中已经对相关电路做了预留,所以不用更改pcb就可以做到通信总线的切换,这种方案可以节省两根通信线束。
27.翼灯与箱灯之间的通讯模块是由三根线组成,包括作为电源管理线的箱灯控制电
源线、翼灯控制箱灯的流水控制信号线和箱灯反馈给翼灯的状态反馈信号线,实现箱灯电子控制器模块与翼灯电子控制器模块的连接,实现作为主灯的翼灯对作为从灯的箱灯的控制;如图1所示,所述箱灯控制电源的输入端与翼灯电子控制器模块的高边开关连接,所述箱灯控制电源的输出端与箱灯电子控制器模块的稳压电压连接,所述流水控制信号线一端连接翼灯微控制器的流水控制口,另一端连接箱灯微控制器的流水控制接收口,所述状态反馈信号线一端连接箱灯微控制器的状态反馈口,另一端连接翼灯微控制器的状态反馈接收口。
28.本实施例还提供一种点灯方法,在点灯正常状态下,如图2所示,当turn sync变高的时候,(a)翼灯电子控制器模块会将流水控制的电平由低拉高;(b)然后箱灯电子控制器模块会检测到流水控制电平为高,则开始进行箱灯的点灯动作,箱灯的每个led的状态会按设计的时间间隔被切换为on的开启状态;(c)当箱灯的第一颗led被成功点亮后,箱灯会将状态反馈线由低拉高;(d)在turn sync变高且流水控制信号电平由低变高的时刻,翼灯电子控制器模块上的翼灯微控制器内部计时器开始计时,等到计时器计时结束,且检测到状态反馈线电平为高时,翼灯开始进行点灯动作,翼灯的每个led的状态会按设计的时间间隔被切换为on的开启状态,直至整个流水点亮动作结束,翼灯与箱灯的灯将会保持常亮;(e)直到turn sync由高变低,翼灯电子控制器模块与箱灯电子控制器模块会通过i
²
c通讯控制灯全部关闭,同时箱灯控制电源会被切断。
29.后面会一直循环上述点灯步骤,由于翼灯微控制器内部的计时器在每次turn sync由低变高后会进行重置,且箱灯在每次turn sync由低变高后的点灯动作(a)到(a)是由翼灯电子控制器模块控制,这种只由翼灯主控开始点灯动作,且翼灯电子控制器模块内部计时器会被turn sync重置的控制方式可以消除累计误差现象。在点灯异常状态下,即当翼灯出现led的开路,短路,过热,欠压等失效或错误时led驱动芯片会通过i
²
c通信将这些异常告知翼灯电子控制器模块,翼灯电子控制器模块再通过can通信告知车身控制器bcm翼灯的异常点;当箱灯出现led的开路,短路,过热,欠压等失效或错误时,翼灯亮灯单元中的led驱动芯片会通过i
²
c通信将这些异常告知箱灯电子控制器模块,箱灯电子控制器模块会通过拉低状态反馈线的电平,告知翼灯电子控制器模块箱灯有异常,翼灯电子控制器模块再通过can通信告知车身控制器bcm箱灯有异常;当车身控制器bcm接收到诊断异常后,如果长时间未做处理,在三个转向灯点亮周期的循环后,系统会主动关闭所有供电模块,包括关闭翼灯电源模块,箱灯控制电源,箱灯电源模块,这样整个系统会进入睡眠模式,可以有效保护车灯,并可从外观发现车灯有损坏,提醒驾驶人员及时修理,确保安全。
30.本实施例提供了一种作为主灯的翼灯控制作为从灯的箱灯的控制方式,通过三根连接线连接了翼灯与箱灯,分别为一根箱灯控制电源线:作为电源管理线,一根流水控制线:作为通讯信号线,一根状态反馈线:作为通讯信号线;其中,箱灯控制电源线,其由翼灯给箱灯供电的方式,有两个优势,第一个只需要翼灯处于活跃状态或者休眠模式中,便可实现唤醒使整个系统做到快速唤醒,做到点灯低延迟的效果;第二个是由于翼灯可以控制箱灯电子控制器模块的启动,所以箱灯可以在
turn sync为低(翼灯处于活跃),或者长时间没有转向需求的时候(翼灯进入睡眠模式),翼灯微控制器会通过高边开关切断箱灯控制电源,箱灯可以不用工作,只让翼灯处于活跃或者睡眠模式中,箱灯处于无功耗状态中;翼灯与箱灯进行信息交互的流水控制信号线以及状态反馈信号线这种信息交互方式,有两个优势,第一个是箱灯可以随时反馈箱灯状态给翼灯,翼灯可以随时监控到箱灯的状态,并在有错误的时候,使系统进入保护模式,提醒驾驶人员及时修灯,极大地降低了功能安全的风险;第二个是翼灯作为主控制端,可以重置内部计时器,并且可以通过流水控制信号线控制箱灯点灯,做到消除累计误差;第三个是翼灯作为主控制端,可以通过状态反馈线,实时接收到箱灯状态,并可以通过一路can反馈给车身控制器bcm,相比于现有设计的翼灯和箱灯分别使用一路can反馈给车身控制器bcm的方案,本发明的系统可以减少一路can线以及相关原器件。
31.上述实施例仅例示性说明本发明的原理及其功效,而非用于限制本发明。任何熟悉此技术的人士皆可在不违背本发明的精神及范畴下,对上述实施例进行修饰或改变。因此,凡举所属技术领域中包括通常知识者在未脱离本发明所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本发明的权利要求所涵盖。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。