1.本发明属于机器人技术领域,具体涉及一种具有伸缩及自重构功能的综合式空间模块机器人。
背景技术:
2.机器人技术是系统工程、机器人学、机构学、仿生学、计算机、信息传感技术、控制论、人工智能等多学科交叉汇聚形成的高新技术,是近年来研究十分活跃、应用日益广泛的领域,其应用状况标志了一个国家工业自动化发展水平。随着科学技术和现代工业智能化水平的不断提高,为适应不同工作环境和工作任务,出现了一类由若干相同模块单元通过自身连接器相互连接所组成的群体同构机器人系统或称为模块机器人系统,其系统内的相同模块单元称为模块机器人。
3.群体同构机器人系统具有两方面的显著特征,分别是规则的系统结构和多样的系统形态。一方面系统内模块机器人的同构性及连接方式的规律性使得系统构型呈现高度的规律一致性,既有利于借助拓扑学理论分析系统构型变化,也有利于通过增加与删除连接关系的方式,改变系统规模;另一方面通过改变系统内模块机器人的连接关系及分布状态,系统可以呈现多样的构型,其构型变换既可以是二维平面,也可以是三维空间。由于该类机器人系统具备在极端、未知及危险条件下代替人类完成复杂工况、多任务的潜力,在军事、未知环境勘测、抢险救灾、化工及放射性设备维修等众多领域拥有广阔的应用前景,受到了越来越多国内外研究学者及工程技术人员的广泛关注,也是近年来的一个前沿研究热点。
4.经对现有技术的文献检索发现:模块机器人按结构及系统形变方式可划分三大类:晶格式、链式及综合式。其中晶格式模块机器人的结构大多具备规则几何特性,如正方形、三角形、球形等,系统几何拓扑结构具备严格的规律性;链式模块机器人的连接器较晶格式模块机器人少,但自身的自由度配置更为灵活;综合式模块机器人则同时兼具晶格式系统和链式系统的特征,具备规则的结构外形、充足的连接器配置及灵活的运动能力。几种典型的模块机器人,如美国康奈尔大学victorzykov等人在《evolvedanddesigned modularrobotics systems capable ofself
‑
reproduction》中设计的molecubes晶格式模块机器人;美国内布拉斯加大学奥马哈分校jos
é
baca等人在《modred:hardware design andreconfiguration planning for a high dexterity modular self
‑
reconfigurable robotfor extra
‑
terrestrial exploration》中设计的modred链式模块机器人;美国斯蒂文斯理工学院yanmeng等人在《cross
‑
ball:anewmorphogenetic self
‑
reconfigurable modular robot》中设计的cross
‑
ball综合式模块机器人;等等。美国的模块机器人技术在国际上一直处于领先地位,日本及欧洲国家次之。国内对模块机器人及其系统自重构方面的研究虽取得一些阶段性成果,但起步较晚,相比之下仍有一定差距。
5.进一步,对公开文献检索发现:从解决实际工程问题的角度看,无论是何种构型所组成的模块机器人系统,保持系统鲁棒性是目标任务达成的重要保障因素和先决条件;换言之,满足故障自修复需求以提升自重构能力是模块机器人系统设计与应用并走向实用化
的关键与难点。
6.进一步,根据模块机器人相互连接关系,系统自重构研究思路主要可分为关系可变和关系不可变两种。前者是通过系统内模块机器人不断运动,使所有目标构型外模块机器人进入目标构型内来实现系统自重构,此方式需要借助全局信息判定模块机器人位置与目标构型的所属关系,并需要进行运动顺序规划以避免干涉碰撞,多为集中式控制,当系统规模变大时,自重构效率偏低且难以适应随机出现的故障分布情况;而后者是保持系统内模块机器人连接关系不变,通过改变相互配合的方式进行系统整体运动来实现系统自重构,此方式限定了工作空间范围,而且由于模块机器人个体载荷有限,以模块机器人自身形变驱动系统整体运动的方式很难应用于大规模系统。因此,如何以最有效的方式实现大规模拓扑结构系统的目标构型自重构成为模块机器人设计与优化的重点。
技术实现要素:
7.针对现有技术中缺陷与不足,本发明的目的是提供一种具有伸缩及自重构功能的综合式空间模块机器人,其设计兼顾了系统构建的形变特征及结构简化要求,包含伸缩、旋转及俯仰三个自由度以及一个旋拧锁紧自由度,连接方式灵活,对准要求低,易于分布式控制,可靠性高,可实现空间多角度连接与满足系统内故障空位穿行的自修复策略,保证大规模拓扑结构系统的活跃度与鲁棒性,从而提升群体同构机器人系统的自重构效率。
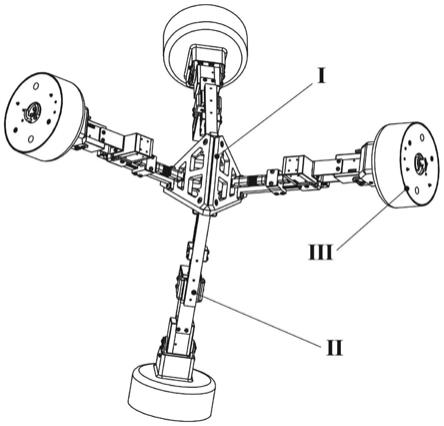
8.本发明是这样实现的:其构造特征是如图1所示,由内向外依次包括有椎体组件(ⅰ)、三自由度的机械臂组件(ⅱ)及一自由度的连接器组件(ⅲ),四个机械臂组件(ⅱ)分别与椎体组件(ⅰ)的四个椎体面板(1)相联接,且四个椎体面板(1)在空间几何上呈正四面体分布,四个连接器组件(ⅲ)分别与四个机械臂组件(ⅱ)的俯仰关节(iii)相联接,且在空间运动形式上构成四面体单元。
9.所述椎体组件(ⅰ)的构造是如图2所示,四个椎体面板(1)通过四个连接块(2)进行定位装配,且由若干个十字槽盘头螺钉(4)经椎体面板沉头孔(a)及连接块螺纹孔(a')联接固定;任一椎体面板(1)上开设有正三角形分布的电路板安装螺纹孔(b、b'、b”),与铜柱(5、5'、5”)的螺杆联接;电路板(3)上开设有对应正三角形分布的电路板安装孔(c、c'、c”),通过螺栓联接安装固定电路板(3)于铜柱(5、5'、5”)柱体上;任一椎体面板(1)上开设有导轨板安装螺纹孔(d、d')及矩形孔(e),与机械臂组件(ⅱ)进行固接装配。
10.所述机械臂组件(ⅱ)的构造是如图3、图4所示,包括伸缩关节(i)、旋转关节(ii)及俯仰关节(iii),其中伸缩关节(i)是一个平动自由度,包括有导轨安装板(6)、直线舵机安装座(7)、直线舵机安装盖(8)、直线舵机(9)、直线导轨(10)及导轨滑块(11),伸缩行程由直线舵机(9)决定;旋转关节(ii)是一个转动自由度,包括有下安装板(13)、上安装板(14)、旋转舵机(15
‑
a)及旋转构件(16),旋转角度为0至360
°
;俯仰关节(iii)是一个转动自由度,包括有俯仰舵机(15
‑
b)、后连接件(17)及前连接件(18),后连接件(17)与前连接件(18)共同组成俯仰构件,俯仰角度可达
±
115
°
。
11.所述机械臂组件(ⅱ)的联接顺序依次为:首先导轨滑块(11)安置于直线导轨(10)上并形成摩擦副,直线导轨(10)通过若干个十字沉头螺钉(12)固接于导轨安装板(6)上的导槽内,直线舵机安装座(7)通过若干个十字槽盘头螺钉(4)固接到导轨安装板(6),直线舵机(9)的前端通过十字槽盘头螺钉(4)与下安装板(13)前部的直线舵机安装螺纹孔(f)相联
接,再通过若干个十字沉头螺钉(12)将下安装板(13)与导轨滑块(11)相联接,与此同时将直线舵机(9)安置于直线舵机安装座(7)的卡槽内,并通过若干个十字槽盘头螺钉(4)经直线舵机安装盖(8)将其固定;其次将旋转构件(16)通过若干个十字槽盘头螺钉(4)与旋转舵机(15
‑
a)相联接,并通过若干个十字沉头螺钉(12)固接于上安装板(14)的卡槽内,再通过若干个十字槽盘头螺钉(4)与下安装板(13)相联接;接着通过若干个十字槽盘头螺钉(4)将俯仰舵机(15
‑
b)固接到旋转构件(16)的前端,后连接件(17)与前连接件(18)通过螺栓联接一并组成俯仰构件,再通过若干个十字槽盘头螺钉(4)将俯仰构件固接到俯仰舵机(15
‑
b)上,与此同时需要将防护罩(21)预先套挂以进行连接器组件(ⅲ)的装配;最后将导轨安装板(6)安置于任一椎体面板(1)上的矩形孔(e)内,同时直线舵机(9)的后端伸入对应梯形孔内,再通过若干个十字槽盘头螺钉(4)经导轨板安装螺纹孔(d、d')将导轨安装板(6)与椎体面板(1)相固定。
12.所述连接器组件(ⅲ)的构造是如图5、图6所示,包括旋拧舵机(15
‑
c)、绝缘对接面板(19)、旋拧卡盘(20)、防护罩(21)、弹簧柱塞(22、22')、接触块(23、23')、接线端子(24)及六角薄螺母(25),其中绝缘对接面板(19)上开设有对称的走线孔(t),用作群体同构机器人系统初始状态的任一动力外接,且旋拧舵机(15
‑
c)与旋拧卡盘(20)组成一个转动自由度,对接动作完成后驱动进行机械锁紧;
13.所述连接器组件(ⅲ)的联接顺序依次为:首选通过若干个十字槽盘头螺钉(4)将旋拧卡盘(20)经绝缘对接面板(19)的中心通孔(o)与旋拧舵机(15
‑
c)相联接固定,中心通孔(o)与旋拧卡盘(20)为间隙配合,间隙量为0.1mm
‑
0.2mm;弹簧柱塞(22、22')与接触块(23、23')分别联接到绝缘对接面板(19)的弹簧柱塞安装阶梯螺纹孔(n、n')、接触块安装螺纹孔(m、m')的对应位置上,接着再将若干个接线端子(24)套于弹簧柱塞(22、22')、接触块(23、23')的柱体表面,并通过若干个六角薄螺母(25)与绝缘对接面板(19)内表面相触且拧紧,且弹簧柱塞(22、22')与接触块(23、23')相接的电极相反;其次将旋拧舵机(15
‑
c)通过若干个十字槽盘头螺钉(4)固接到俯仰关节(iii)的前连接件(18)上,并通过若干个十字槽盘头螺钉(4)将前连接件(18)与绝缘对接面板(19)上开设的若干个前连接件安装螺纹孔(k)相联接固定;最后将套挂的防护罩(21)安置于绝缘对接面板(19)的圆周外侧,并通过若干个十字槽盘头螺钉(4)经防护罩(21)上的防护罩安装孔(h、h')及后连接件(17)两侧的防护罩安装螺纹孔(g、g')将防护罩(21)固定。
14.本发明优点及积极效果是:
15.①
本发明上述结构中,各零件结构简单、加工制造难度低、成本低廉、安装方便,且整体空间结构规则、连接方式灵活、通用组合性强,易于根据系统结构拓扑学特征来灵活配置自由度及运动执行方式,从而实现构建不同规模数量的群体同构机器人系统,以适应不同工作环境及工作任务。
16.②
本发明上述结构中,每个机械臂组件设计有伸缩、旋转及俯仰三个关节,易于采用分布式控制,可实现空间多角度连接与满足系统内故障空位穿行的自修复策略,保证了大规模拓扑结构系统的活跃度与鲁棒性,从而提升了群体同构机器人系统的自重构效率。
17.③
进一步,本发明设计的连接器组件中,弹簧柱塞与接触块相接的电极相反,不仅能够保证群体同构机器人系统当前构型下的功率传递,而且在实行目标构型的重构过程中,当对接距离接近时,在电磁力作用下即可使得对接的两连接器组件完成绝对契合,保证
了对接动作发生不规则错位,降低了对准要求。
18.④
进一步,本发明设计的连接器组件还具有一个旋拧自由度,能够在对接动作完成后进行机械锁紧,提高了系统刚度与对接可靠性。
附图说明
19.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显;
20.图1为本发明三维整体结构装配体示意图;
21.图2为本发明椎体组件(ⅰ)爆炸视图;
22.图3为本发明机械臂组件(ⅱ)爆炸视图;
23.图4为本发明机械臂组件(ⅱ)装配体示意图;
24.图5为本发明连接器组件(ⅲ)爆炸视图;
25.图6为本发明连接器组件(ⅲ)装配体示意图;
26.图7为本发明单个空间模块机器人结构模型简图;
27.图8为本发明15个空间模块机器人拓扑结构示意图;
28.图9为本发明25个空间模块机器人拓扑结构示意图;
29.图中标号:
ⅰ‑
椎体组件,
ⅱ‑
机械臂组件,
ⅲ‑
连接器组件,i
‑
伸缩关节,ii
‑
旋转关节,iii
‑
俯仰关节,1
‑
椎体面板,2
‑
连接块,3
‑
电路板,4
‑
十字槽盘头螺钉,5、5'、5
”‑
铜柱,6
‑
导轨安装板,7
‑
直线舵机安装座,8
‑
直线舵机安装盖,9
‑
直线舵机,10
‑
直线导轨,11
‑
导轨滑块,12
‑
十字沉头螺钉,13
‑
下安装板,14
‑
上安装板,15
‑
a
‑
旋转舵机,15
‑
b
‑
俯仰舵机,15
‑
c
‑
旋拧舵机,16
‑
旋转构件,17
‑
后连接件,18
‑
前连接件,19
‑
绝缘对接面板,20
‑
旋拧卡盘,21
‑
防护罩,22、22'
‑
弹簧柱塞,23、23'
‑
接触块,24
‑
接线端子,25
‑
六角薄螺母,a
‑
椎体面板沉头孔,a'
‑
连接块螺纹孔,b、b'、b
”‑
电路板安装螺纹孔,c、c'、c
”‑
电路板安装孔,d、d'
‑
导轨板安装螺纹孔,e
‑
矩形孔,f
‑
直线舵机安装螺纹孔,g、g'
‑
防护罩安装螺纹孔,h、h'
‑
防护罩安装孔,k
‑
前连接件安装螺纹孔,m、m'
‑
接触块安装螺纹孔,n、n'
‑
弹簧柱塞安装阶梯螺纹孔,o
‑
中心通孔,t
‑
走线孔。
具体实施方式
30.下面将结合本发明实施例中的附图,对本发明进行详细说明。以下实施例将有助于本领域的工程技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
31.参照图1所示,为本发明一实施例中具有伸缩及自重构功能的综合式空间模块机器人的整体结构布置示意图,该综合式空间模块机器人由内向外依次包括有椎体组件ⅰ、三自由度的机械臂组件ⅱ及一自由度的连接器组件ⅲ,四个机械臂组件ⅱ分别与椎体组件ⅰ的四个椎体面板1相联接,且四个椎体面板1在空间几何上呈正四面体分布,四个连接器组件ⅲ分别与四个机械臂组件ⅱ的俯仰关节iii相联接,且在空间运动形式上构成四面体单元,可实现空间多角度连接与满足系统内故障空位穿行的自修复策略,自重构效率高。
32.具体的,一种具有伸缩及自重构功能的综合式空间模块机器人,其结构构造依次
是:
33.参照图2所示,所述椎体组件ⅰ包括四个椎体面板1、四个连接块2、电路板3、铜柱5、5'、5”及若干个十字槽盘头螺钉4;
34.参照图3、图4所示,所述机械臂组件ⅱ包括伸缩关节i、旋转关节ii及俯仰关节iii,以及若干个十字槽盘头螺钉4、若干个十字沉头螺钉12,其中伸缩关节i是一个平动自由度,包括有导轨安装板6、直线舵机安装座7、直线舵机安装盖8、直线舵机9、直线导轨10及导轨滑块11,伸缩行程由直线舵机9决定;旋转关节ii是一个转动自由度,包括有下安装板13、上安装板14、旋转舵机15
‑
a及旋转构件16,旋转角度为0至360
°
;俯仰关节iii是一个转动自由度,包括有俯仰舵机15
‑
b、后连接件17及前连接件18,后连接件17与前连接件18共同组成俯仰构件,俯仰角度可达
±
115
°
;
35.参照图5、图6所示,所述连接器组件ⅲ包括旋拧舵机15
‑
c、绝缘对接面板19、旋拧卡盘20、防护罩21、弹簧柱塞22、22'、接触块23、23'、接线端子24及六角薄螺母25,以及若干个十字槽盘头螺钉4,其中绝缘对接面板19上开设有对称的走线孔t,用作群体同构机器人系统初始状态的任一动力外接,且旋拧舵机15
‑
c与旋拧卡盘20组成一个转动自由度,对接动作完成后驱动进行机械锁紧。
36.具体总装配步骤及顺序如下:
37.首先,椎体组件ⅰ的子装配过程:由若干个十字槽盘头螺钉4经椎体面板沉头孔a及连接块螺纹孔a'将四个椎体面板1和四个连接块2联接固定;任一椎体面板1上开设有正三角形分布的电路板安装螺纹孔b、b'、b”,与铜柱5、5'、5”的螺杆联接;电路板3上开设有对应正三角形分布的电路板安装孔c、c'、c”,通过螺栓联接安装固定电路板3于铜柱5、5'、5”柱体上;任一椎体面板1上开设的导轨板安装螺纹孔d、d'及矩形孔e,后续与机械臂组件ⅱ进行固接装配。
38.其次,机械臂组件ⅱ的子装配过程:导轨滑块11安置于直线导轨10上并形成摩擦副,直线导轨10通过若干个十字沉头螺钉12固接于导轨安装板6上的导槽内,直线舵机安装座7通过若干个十字槽盘头螺钉4固接到导轨安装板6,直线舵机9的前端通过十字槽盘头螺钉4与下安装板13前部的直线舵机安装螺纹孔f相联接,再通过若干个十字沉头螺钉12将下安装板13与导轨滑块11相联接,与此同时将直线舵机9安置于直线舵机安装座7的卡槽内,并通过若干个十字槽盘头螺钉4经直线舵机安装盖8将其固定;将旋转构件16通过若干个十字槽盘头螺钉4与旋转舵机15
‑
a相联接,并通过若干个十字沉头螺钉12固接于上安装板14的卡槽内,再通过若干个十字槽盘头螺钉4与下安装板13相联接;接着通过若干个十字槽盘头螺钉4将俯仰舵机15
‑
b固接到旋转构件16的前端,后连接件17与前连接件18通过螺栓联接一并组成俯仰构件,再通过若干个十字槽盘头螺钉4将俯仰构件固接到俯仰舵机15
‑
b上,与此同时需要将防护罩21预先套挂以进行后续连接器组件ⅲ的装配;将导轨安装板6安置于任一椎体面板1上的矩形孔e内,同时直线舵机9的后端伸入对应梯形孔内,再通过若干个十字槽盘头螺钉4经导轨板安装螺纹孔d、d'将导轨安装板6与椎体面板(1)相固定;重复该操作,完成其余三个机械臂组件ⅱ的子装配。
39.最后,连接器组件ⅲ的子装配过程:通过若干个十字槽盘头螺钉4将旋拧卡盘20经绝缘对接面板19的中心通孔o与旋拧舵机15
‑
c相联接固定,中心通孔o与旋拧卡盘20为间隙配合,间隙量为0.1mm
‑
0.2mm;弹簧柱塞22、22'与接触块23、23'分别联接到绝缘对接面板19
的弹簧柱塞安装阶梯螺纹孔n、n'、接触块安装螺纹孔m、m'的对应位置上,接着再将若干个接线端子24套于弹簧柱塞22、22'、接触块23、23'的柱体表面,并通过若干个六角薄螺母25与绝缘对接面板19内表面相触且拧紧,且弹簧柱塞22、22'与接触块23、23'相接的电极相反;将旋拧舵机15
‑
c通过若干个十字槽盘头螺钉4固接到俯仰关节iii的前连接件18上,并通过若干个十字槽盘头螺钉4将前连接件18与绝缘对接面板19上开设的若干个前连接件安装螺纹孔k相联接固定;将套挂的防护罩21安置于绝缘对接面板19的圆周外侧,并通过若干个十字槽盘头螺钉4经防护罩21上的防护罩安装孔h、h'及后连接件17两侧的防护罩安装螺纹孔g、g'将防护罩21固定;重复该操作,完成其余三个连接器组件ⅲ的子装配。
40.参照图7所示的本发明单个空间模块机器人结构模型简图,基于系统形变特征的功能分解与实现设计方法,通过确定模块机器人拓扑结构,灵活配置自由度及运动执行方式,可构建不同规模数量的群体同构机器人系统,以适应不同工作环境及工作任务。作为优选的不同实施例,图8所示为本发明15个空间模块机器人拓扑结构示意图、图9所示为本发明25个空间模块机器人拓扑结构示意图。
41.补充说明:
42.本发明上述中所有结构尺寸及伸缩行程等,均可根据实际空间参数限制、具体的应用场景等作出调整,实现同样的自重构功能。
43.以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内作出各种变形或修改,这并不影响本发明的实质内容。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。