用于汽车发动机ecu护盖的坐标机器人
技术领域
1.本新型涉及机器人技术领域,特别是一种用于汽车发动机ecu护盖的坐标机器人。
背景技术:
2.目前,发动机ecu护盖焊接都是操作员来把上下护盖板对齐,把需要焊接的位置放在碰焊机铜柱上,然后操作碰焊机来把上下护盖板进行焊接,全部操作都是操作员一直拿着上下护盖板进行的。
3.使用原来的方式,操作员一直拿着上下护盖板进行焊接,长时间如此工作,不仅焊接的精度很差,而且会经常出线漏焊的位置,导致经常需要返工,大大降低工作效率,劳动强度还会增大。焊接的位置温度很高,操作员没有注意到时,会烫伤操作员,造成不必要的工伤出现。
技术实现要素:
4.本新型为了有效的解决上述背景技术中的问题,提出了一种用于汽车发动机ecu护盖的坐标机器人,具体技术方案如下:
5.一种用于汽车发动机ecu护盖的坐标机器人,其特征在于,包括碰焊机和设置在其一侧的送料机构,所述送料机构包括第一框架、第一kk模组、第一连接板、第二框架、第二kk模组、末端、第二连接板和导轨,所述末端包括两个气缸、两个旋转下压缸、第三连接板、工装板和第四连接板,所述两个气缸的活塞杆上部分别与所述工装板的底部两侧连接,两个气缸的侧部分别与所述第三连接板和第四连接板固定连接,所述两个旋转下压缸固定在工装板底部两侧,其活塞杆从工装板伸出并连接有压块,所述第三连接板与第二kk模组的滑台连接,第四连接板与位于第二框架后侧的导轨连接,所述第二kk模组固定在第二框架的前侧,所述第二框架的左侧通过第二连接板与固定在第一框架左侧的导轨连接,所述第二框架的右侧通过第一连接板与第一kk模组的滑台连接。
6.优选地,所述工装板上设有定位凹槽。
7.优选地,所述碰焊机的焊头位于第二框架的上方。
8.与现有技术相比,本新型的有为益效果是:通过气缸能够控制ecu护盖的上下高度,通过旋转夹紧气缸能够夹紧ecu护盖,通过横向和纵向的kk模组能够控制ecu护盖前后左右位置,实现自动对位焊接,使人远离焊接位置,避免了人被烫伤等工伤情况。
附图说明
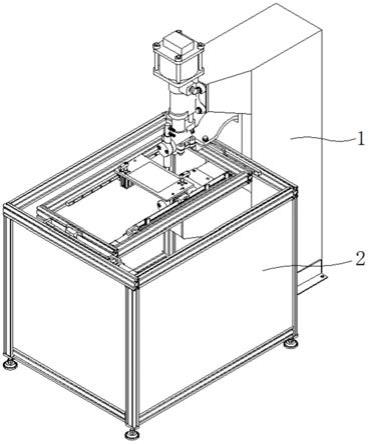
9.图1为本新型的立体图;
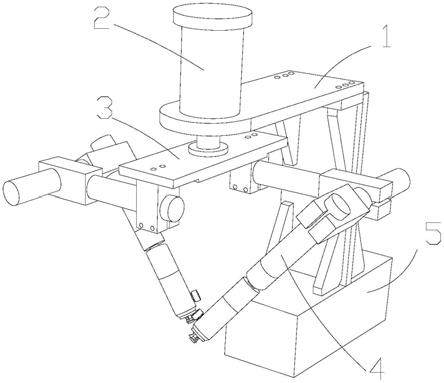
10.图2为本新型中送料机构的立体图;
11.图3为本实用新型中末端的立体图。
具体实施方式
12.为了便于描述,在这里可以使用空间相对术语,如“在
……
之上”、“在
……
上方”、“在
……
上表面”、“上面的”等,用来描述如在图中所示的一个器件或特征与其他器件或特征的空间位置关系。应当理解的是,空间相对术语旨在包含除了器件在图中所描述的方位之外的在使用或操作中的不同方位。例如,如果附图中的器件被倒置,则描述为“在其他器件或构造上方”或“在其他器件或构造之上”的器件之后将被定位为“在其他器件或构造下方”或“在其他器件或构造之下”。因而,示例性术语“在
……
上方”可以包括“在
……
上方”和“在
……
下方”两种方位。该器件也可以其他不同方式定位旋转90度或处于其他方位,并且对这里所使用的空间相对描述作出相应解释。
13.下面结合附图及较佳实施例详细说明本新型的具体实施方式。如图1
‑
3所示,一种用于汽车发动机ecu护盖的坐标机器人,包括碰焊机1和设置在其一侧的送料机构2,所述送料机构包括第一框架3、第一kk模组4、第一连接板5、第二框架6、第二kk模组7、末端8、第二连接板9和导轨10,所述末端包括第三连接板11、两个气缸12、两个旋转下压缸15、工装板13和第四连接板16,所述工装板13安装在气缸12上,当两个气缸12伸出或者收缩时,会带动工装板13上下运动,旋转下压缸15本体固定在工装板13上,ecu护盖14放在工装板13凹槽内,当旋转下压缸15进行旋转下压动作时,会紧紧把ecu护盖14压紧在工装板13凹槽内,第三连接板11连接气缸12和第二kk模组7,当第二kk模组7滑台移动时,末端8整体会跟随运动,第二kk模组7本体固定在第二框架6上,第二连接板9连接导轨10和第二框架6,第一连接板5连接第一kk模组4和第二框架6,第一连接板5固定在第一kk模组4滑台上,当第一kk模组4滑台移动时,会带动第二框架6运动,第一kk模组4本体固定在第一框架3上,当送料机构2根据程序将ecu护盖14移动到对应焊接位置时,碰焊机1进行焊接操作。
14.以上所述仅是本新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本新型的保护范围。
技术特征:
1.一种用于汽车发动机ecu护盖的坐标机器人,其特征在于,包括碰焊机和设置在其一侧的送料机构,所述送料机构包括第一框架、第一kk模组、第一连接板、第二框架、第二kk模组、末端、第二连接板和导轨,所述末端包括两个气缸、两个旋转下压缸、第三连接板、工装板和第四连接板,所述两个气缸的活塞杆上部分别与所述工装板的底部两侧连接,两个气缸的侧部分别与所述第三连接板和第四连接板固定连接,所述两个旋转下压缸固定在工装板底部两侧,其活塞杆从工装板伸出并连接有压块,所述第三连接板与第二kk模组的滑台连接,第四连接板与位于第二框架后侧的导轨连接,所述第二kk模组固定在第二框架的前侧,所述第二框架的左侧通过第二连接板与固定在第一框架左侧的导轨连接,所述第二框架的右侧通过第一连接板与第一kk模组的滑台连接。2.根据权利要求1所述的用于汽车发动机ecu护盖的坐标机器人,其特征在于,所述工装板上设有定位凹槽。3.根据权利要求1所述的用于汽车发动机ecu护盖的坐标机器人,其特征在于,所述碰焊机的焊头位于第二框架的上方。
技术总结
本新型涉及机器人技术领域,特别是一种用于汽车发动机ECU护盖的坐标机器人,包括碰焊机和设置在其一侧的送料机构,所述送料机构包括第一框架、第一KK模组、第一连接板、第二框架、第二KK模组、末端、第二连接板和导轨,所述末端包括两个气缸、两个旋转下压缸、第三连接板、工装板和第四连接板。通过气缸能够控制ECU护盖的上下高度,通过旋转夹紧气缸能够夹紧ECU护盖,通过横向和纵向的KK模组能够控制ECU护盖前后左右位置,实现自动对位焊接,使人远离焊接位置,避免了人被烫伤等工伤情况。避免了人被烫伤等工伤情况。避免了人被烫伤等工伤情况。
技术研发人员:王海 胡伟 肖薇
受保护的技术使用者:天津龙创恒盛实业有限公司
技术研发日:2021.05.11
技术公布日:2021/12/7
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。