1.本发明涉及半导体技术领域,特别涉及一种凸块高度的检测装置及方法。
背景技术:
2.为了进行芯片(chip)的封装,晶圆(wafer)上通常设置有凸块(bump)以便与封装的基板连接。每个晶圆可以被裁切成整个晶粒(die),即形成单颗芯片,依据晶粒的数目,在晶圆上形成数个金属接触垫,金属接触垫之间以钝化层分隔,制作凸块时,先在金属接触垫之上形成一凸块下金属层(ubm)结构,接着在凸块下金属层上形成一锡银金属层,锡银金属层经过回焊后固化形成凸块。
3.然而随着封装技术小型化、高性能化的发展,电镀凸块(bump)均匀性对产品来说是很重要的指标,电镀bump高度均匀性差会对后制成产生影响,在焊接的过程中会因凸块高度不均匀,而导致虚焊、焊接不牢等现象。为了保持良好的连接,晶圆上所有凸块(每个管芯上可能有数千个凸块)的高度必须在允许的公差范围内均匀分布。因此,凸块高度的检测是晶圆制造过程控制中必不可少的部分。
技术实现要素:
4.本发明的目的在于提供一种凸块高度的检测装置和方法,提高凸块高度的检测效率,节约成本。
5.为了达到上述目的,本发明提供一种凸块高度的检测装置,包括:
6.光源,用于发射检测光束;
7.照明光路,用于将所述检测光束按一照射角度入射到带有凸块的晶圆;
8.探测光路,用于接收所述检测光束经所述晶圆反射形成的反射光束;
9.线扫相机,用于对所述探测光路出来的所述反射光束进行成像,以获得光强信号图像,所述检测光束入射到所述晶圆时在扫描方向的宽度覆盖所述凸块,以在所述光强信号图像中形成与所述凸块对应的阴影区;以及
10.高度检测单元,用于根据所述阴影区的光强信号和位置数据获取所述凸块的高度信息。
11.可选的,若检测平顶凸块,所述阴影区中无凸块顶部反光形成的亮点,所述凸块的高度h=(h1
‑
h3)/(2sinθ*m),
12.其中,h1为所述阴影区沿扫描方向的上边界值,h3为所述阴影区沿扫描方向的下边界值,θ为所述检测光束的照射角度,m为所述探测光路中探测物镜的倍率。
13.可选的,若检测球顶凸块,所述阴影区中有凸块顶部反光形成的亮点,所述凸块的高度h=(h1 h3
‑
2*h2)/(2sinθ*m),
14.其中,h1为所述阴影区沿扫描方向的上边界值,h2为所述阴影区中亮点的中心值,h3为所述阴影区沿扫描方向的下边界值,θ为所述检测光束的照射角度,m为所述探测光路中探测物镜的倍率。
15.可选的,所述光源和所述照明光路之间还包括投影狭缝,所述检测光束通过所述投影狭缝整形成线型光斑,所述检测光束入射到所述晶圆时光斑在扫描方向的宽度覆盖所述凸块。
16.可选的,所述照明光路中包括孔径光阑。
17.可选的,还包括晶圆承载单元,用于承载所述晶圆并以一设定速度沿扫描方向移动。
18.可选的,所述照射角度为15
°‑
45
°
。
19.可选的,所述光源为白光光源。
20.相应的,本发明还一种凸块高度的检测方法,包括:
21.光源发射检测光束,通过照明光路按一照射角度入射到带有凸块的晶圆;
22.探测光路接收所述检测光束经所述晶圆反射形成的反射光束,并在线扫相机上形成光强信号图像,所述检测光束入射到所述晶圆时在扫描方向的宽度覆盖所述凸块,以在所述光强信号图像中形成与所述凸块对应的阴影区;以及
23.高度检测单元根据所述阴影区的光强信号和位置数据获取所述凸块的高度信息。
24.可选的,所述高度检测单元根据所述阴影区的光强信号和位置数据获取所述凸块的高度信息包括:
25.若检测平顶凸块,所述阴影区中无凸块顶部反光形成的亮点,所述凸块的高度h=(h1
‑
h3)/(2sinθ*m),
26.其中,h1为所述阴影区沿扫描方向的上边界值,h3为所述阴影区沿扫描方向的下边界值,θ为所述检测光束的照射角度,m为所述探测光路中探测物镜的倍率。
27.可选的,所述高度检测单元根据所述阴影区的光强信号和位置数据获取所述凸块的高度信息包括:
28.若检测球顶凸块,所述阴影区中有凸块顶部反光形成的亮点,所述凸块的高度h=(h1 h3
‑
2*h2)/(2sinθ*m),
29.其中,h1为所述阴影区沿扫描方向的上边界值,h2为所述阴影区中亮点的中心值,h3为所述阴影区沿扫描方向的下边界值,θ为所述检测光束的照射角度,m为所述探测光路中探测物镜的倍率。
30.可选的,所述光源为白光光源。
31.可选的,所述照射角度为15
°‑
45
°
。
32.综上,本发明提供一种凸块高度的检测装置和方法,包括:光源、照明光路、探测光路、线扫相机及高度检测单元,光源发射的检测光束经照明光路入射到带有凸块的晶圆,经反射进入探测光路并在线扫相机上形成光强信号图像,由于检测光束入射到晶圆时在扫描方向的宽度覆盖所述凸块,故光强信号图像中形成有与所述凸块对应的阴影区,高度检测单元根据阴影区的光强信号和位置数据获取凸块的高度信息。本发明采用线扫相机进行成像,线扫相机的扫描视场和扫描速度均远高于面阵相机,提高了凸块高度的检测效率。另外,线扫相机扫描方向视场只有单像素对应的物方大小,水平分辨率不受检测光束大小影响,降低检测光束的制造难度,节约成本,并提高水平检测精度,且线扫相机水平分辨率只和物镜倍率和像素大小有关,数据量相对较小,进一步节约成本,提高检测效率。
附图说明
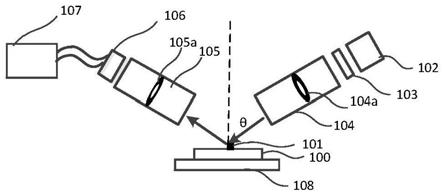
33.图1为本发明一实施例提供的凸块高度的检测装置的结构示意图;
34.图2为检测光束入射到晶圆的示意图;
35.图3a为检测光束入射一平顶凸块并在线扫相机成像的示意图;
36.图3b为光强信号图像中与图3a中凸块对应的阴影区的示意图;
37.图4a为检测光束入射另一球顶凸块并在线扫相机成像的示意图;
38.图4b为光强信号图像中与图4a中凸块对应的阴影区的示意图;
39.图5a为球顶凸块成像的示意图;
40.图5b为光强信号图像中与图5a中凸块对应的阴影区的影像;
41.图5c为光强信号图像中阴影区的亮度和位置的关系图;
42.图6为孔径光阑的示意图。
43.其中,附图标记为:
44.100
‑
晶圆;101
‑
凸块;102
‑
光源;102a
‑
检测光束;103
‑
投影狭缝;104
‑
照明光路;104a、105a
‑
孔径光阑;105
‑
探测光路;106
‑
线扫相机;107
‑
高度检测单元;108
‑
晶圆承载单元;200
‑
阴影区;200a
‑
亮点;
具体实施方式
45.以下结合附图和具体实施例对本发明的凸块高度的检测装置及方法作进一步详细说明。根据下面的说明和附图,本发明的优点和特征将更清楚,然而,需说明的是,本发明技术方案的构思可按照多种不同的形式实施,并不局限于在此阐述的特定实施例。附图均采用非常简化的形式且均使用非精准的比例,仅用以方便、明晰地辅助说明本发明实施例的目的。
46.在说明书和权利要求书中的术语“第一”“第二”等用于在类似要素之间进行区分,且未必是用于描述特定次序或时间顺序。要理解,在适当情况下,如此使用的这些术语可替换,例如可使得本文所述的本发明实施例能够以不同于本文所述的或所示的其他顺序来操作。若某附图中的构件与其他附图中的构件相同,虽然在所有附图中都可轻易辨认出这些构件,但为了使附图的说明更为清楚,本说明书不会将所有相同构件的标号标于每一图中。
47.图1为本实施例提供的一种凸块高度的检测装置的结构示意图,图2为检测光束入射到晶圆的示意图。如图1和图2所示,本实施例提供的凸块高度的检测装置包括:
48.光源102,用于发射检测光束102a;
49.照明光路104,用于将所述检测光束102a按一照射角度θ入射到带有凸块101的晶圆100;
50.探测光路105,用于接收所述检测光束102a经所述晶圆100反射形成的反射光束;
51.线扫相机106,用于对所述探测光路105出来的所述反射光束进行成像,以获得光强信号图像,所述检测光束102a入射到所述晶圆100时在扫描方向的宽度覆盖所述凸块,以在所述光强信号图像中形成与所述凸块101对应的阴影区;以及
52.高度检测单元107,用于根据所述阴影区的光强信号和位置数据获取所述凸块101的高度信息。
53.具体的,所述光源102可以是氙灯、led、汞灯或卤素灯中的任一种发射的多种光源
中一种,优选的,所述光源102为白光光源,所述检测光束102a的照射角度θ为15
°‑
45
°
,例如所述照射角度θ为30
°
。可选的,所述光源102和所述照明光路104之间还包括投影狭缝103,所述检测光束102a通过所述投影狭缝103整形成线型光斑,所述线型光斑经所述照明光路104入射到所述晶圆100时在扫描方向上的宽度覆盖所述凸块101,以确保凸块101顶部反光可以被线扫相机106接收,在光强信号图像中形成与凸块101对应的完整的阴影区。所述线扫相机106只能探测到晶圆100一个固定点的信息,当入射到被凸块101的光线或经晶圆反射的光线被遮挡时,就会出现阴影区,通过线扫相机106记录下阴影的大小。
54.图3a为检测光束入射一凸块并在线扫相机成像的示意图,图3b为光强信号图像中与图3a中凸块对应的阴影区的示意图。如图3a和图3b所示,由于凸块101顶部为平顶,在线扫相机106上形成的光强信号图像中阴影区200为与所述凸块101对应的规则矩形,且如图3b所示,所述阴影区200中无亮点,所述凸块101的高度h=(h1
‑
h3)/(2sinθ*m),其中,h1为所述阴影区200沿扫描方向的上边界值,h3为所述阴影区200沿扫描方向的下边界值,θ为所述检测光束102a的照射角度,m为所述探测光路105中探测物镜的倍率。由于h1和h3为所述阴影区200沿扫描方向的上下边界值,上下边界值的相减即为扫描方向阴影区200的长度d,即d=h1
‑
h3,所以,所述凸块101的高度也可以表示为h=d/(2sinθ*m)。
55.图4a为检测光束入射另一凸块并在线扫相机成像的示意图,图4b为光强信号图像中与图4a中凸块对应的阴影区的示意图,图5a为球顶凸块成像的示意图,图5b为光强信号图像中与图5a中凸块对应的阴影区的影像,图5c为光强信号图像中阴影区的亮度和位置的关系图。如图4a、图4b、图5a、图5b及图5c所示,由于凸块101顶部为球顶,凸块101球顶顶部反射检测光束进入到线扫相机106被检测,从而在阴影区200形成亮点200a,通过计算阴影区200内亮点200a与边缘的距离,可以得到凸块101的高度。具体的,所述凸块101的高度h=(h1 h3
‑
2*h2)/(2sinθ*m),其中,h1为所述阴影区沿扫描方向的上边界值,h2为所述阴影区中亮点的中心值,h3为所述阴影区沿扫描方向的下边界值,θ为所述检测光束的照射角度,m为所述探测光路中探测物镜的倍率。
56.另外,考虑到所述凸块101的顶部存在一定离焦,当凸块101的高度超出所述探测光路105焦深时,凸块101顶部反光成像质量会降低,引起测量误差。本实施例中,所述照明光路104中包括孔径光阑104a,所述探测光路105中包括孔径光阑105a,如图1和图6所示,孔径光阑104a、105a可以增加探测光路和线扫相机在被测物离焦后成像质量,从而增加焦深范围,减少测量误差。
57.本实施例中,所述凸块高度的检测装置还包括晶圆承载单元108,用于承载所述晶圆100并以一设定速度沿扫描方向移动。晶圆100上分布若干凸块(bump)101,圆承载单元108承载所述晶圆100并以一设定速度沿检测光束102a的扫描方向移动,以使晶圆100上的凸块101依次进入检测光束102a的扫描区域,完成晶圆100上凸块高度的检测。若检测到某一凸块的高度超出预设范围,高度检测单元107根据光强信息图像中该凸块阴影区的位置数据,确定该凸块在晶圆100的位置,以达到精确定位缺陷凸块的目的,进而保证晶圆上凸块高度分布的均匀性。
58.传统技术中采用三角测量法获得凸块高度,一般通过光学系统成像到面阵相机,解析得到凸块的高度,检测水平分辨率与检测光束扫描方向宽度有关,光斑越宽光斑内的信息就会被平均,且水平分辨率和采样密度有关,高密度采样时,生成大量的数据量,对数
据传输和处理效率有较高的要求。另外,面阵相机价格昂贵,成本高,相机靶面小、帧频低、数据量大,产率低。本实施例中,采用线扫相机进行成像,线扫相机的扫描视场和扫描速度均远高于面阵相机,有利于检测效率的提升。另外,线扫相机扫描方向视场只有单像素对应的物方大小,因此,水平分辨率不受检测光束大小影响,降低检测光束的制造难度,节约成本,提高水平检测精度,且线扫相机水平分辨率只和物镜倍率和像素大小有关,数据量相对较小,进一步节约成本,提高检测效率。
59.本实施例还提供一种凸块高度的检测方法,采用以上所述的凸块高度的检测装置,如图1和图2所示,所述凸块高度的检测方法包括:
60.光源102发射检测光束102a,通过照明光路104按一扫描角度θ入射到带有凸块101的晶圆100;
61.探测光路105接收所述检测光束102a经所述晶圆反射形成的反射光束,并在线扫相机106上形成光强信号图像,所述检测光束102a入射到所述晶圆100时在扫描方向的宽度覆盖所述凸块101,以在所述光强信号图像中形成与所述凸块101对应的阴影区;以及
62.高度检测单元107根据所述阴影区的光强信号和位置数据获取所述凸块101的高度信息。
63.具体的,参考图3a和图3b所示,所述高度检测单元107根据所述阴影区的光强信号和位置数据获取所述凸块101的高度信息包括:
64.若检测平顶凸块,所述阴影区中无凸块顶部反光形成的亮点,所述凸块101的高度h=(h1
‑
h3)/(2sinθ*m),
65.其中,h1为所述阴影区沿扫描方向的上边界值,h3为所述阴影区沿扫描方向的下边界值,θ为所述检测光束的照射角度,m为所述探测光路中探测物镜的倍率。
66.参考图4a、图4b、图5a、图5b及图5c所示,所述高度检测单元根据所述阴影区的光强信号和位置数据获取所述凸块的高度信息还包括:
67.若检测球顶凸块,所述阴影区中有凸块顶部反光形成的亮点,所述凸块的高度h=(h1 h3
‑
2*h2)/(2sinθ*m),
68.其中,h1为所述阴影区沿扫描方向的上边界值,h2为所述阴影区中亮点的中心值,h3为所述阴影区沿扫描方向的下边界值,θ为所述检测光束的照射角度,m为所述探测光路中探测物镜的倍率。
69.可选的,本实施例提供的凸块高度的检测方法,还包括晶圆承载单元承载所述晶圆并以一设定速度沿扫描方向移动,使所述晶圆上的凸块依次进入所述检测光束的扫描区域,完成晶圆上凸块高度的检测。若检测到某一凸块的高度超出预设范围,高度检测单元根据光强信息图像中该凸块阴影区的位置数据,确定该凸块在晶圆的位置,以达到精确定位缺陷凸块的目的,进而保证晶圆上凸块高度分布的均匀性。
70.可选的,所述光源为白光光源,所述照射角度为15
°‑
45
°
。
71.可选的,所述检测光束102a通过述光源和所述照明光路之间的投影狭缝整形成线型光斑,所述线型光斑经所述照明光路104入射到所述晶圆100时在扫描方向上覆盖所述凸块101,即线型光斑至少在宽度上覆盖所述凸块101,以确保凸块101顶部反光可以被线扫相机106接收,在光强信号图像中形成与凸块101对应的完整的阴影区。
72.可选的,如图1和图6所示,所述线型光斑通过所述照明光路104中的孔径光阑104a
入射至晶圆100,经过反射后进入探测光路105中孔径光阑105a,通过孔径光阑104a、105a增加探测光路和线扫相机的成像质量和焦深范围,减少测量误差。
73.综上所述,本发明提供一种凸块高度的检测装置和方法,包括:光源、照明光路、探测光路、线扫相机及高度检测单元,光源发射的检测光束经照明光路入射到带有凸块的晶圆,经反射进入探测光路并在线扫相机上形成光强信号图像,由于检测光束入射到晶圆时至少在高度上覆盖所述凸块,故光强信号图像中形成有与所述凸块对应的阴影区,高度检测单元根据阴影区的光强信号和位置数据获取凸块的高度信息。本发明采用线扫相机进行成像,线扫相机的扫描视场和扫描速度均远高于面阵相机,提高了凸块高度的检测效率。另外,线扫相机扫描方向视场只有单像素对应的物方大小,水平分辨率不受检测光束大小影响,降低检测光束的制造难度,节约成本,并提高水平检测精度,且线扫相机水平分辨率只和物镜倍率和像素大小有关,数据量相对较小,进一步节约成本,提高检测效率。
74.上述描述仅是对本发明较佳实施例的描述,并非对本发明范围的任何限定,本发明领域的普通技术人员根据上述揭示内容做的任何变更、修饰,均属于权利要求书的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。