1.本发明涉及半导体技术领域,特别涉及一种基底缺陷检测装置及基底缺陷检测方法。
背景技术:
[0002]“超摩尔定律”等概念引领ic行业从追求工艺技术节点的时代,转向更多地依赖于芯片封装技术发展的全新时代。相比于传统封装,晶圆级封装(wafer level packaging,wlp)在缩小封装尺寸、节约工艺成本方面有着显著的优势。因此,wlp将是未来支持ic不断发展的主要技术之一。
[0003]
wlp主要包括pillar/gold/solder bump、rdl、tsv等工艺技术。为了增加芯片制造的良率,在整个封装工艺过程都需要对芯片进行缺陷检测,早期的设备主要集中在表面2d的缺陷检测,例如污染、划痕、颗粒等。随着工艺控制要求的增加,越来越需要对表面3d缺陷进行检测,例如bump高度、rdl层(再分配互连层)的厚度、tsv(through silicon vias“通过硅片通道”)的孔深等。
[0004]
而现有对表面3d缺陷进行检测时,通常是采用单束光对基底进行扫描以根据扫描后的光斑的信息计算得到表面3d缺陷的信息,而采用单束光进行检测时,需要多次检测,进而导致表面3d缺陷检测效率低下。
技术实现要素:
[0005]
本发明的目的在于提供一种基底缺陷检测装置及基底缺陷检测方法,以解决现有的基底缺陷检测装置及基底缺陷检测方法检测效率低下的问题。
[0006]
为解决上述技术问题,本发明提供一种基底缺陷检测装置,包括:
[0007]
光源部件,所述光源部件用于发出至少一束检测光;
[0008]
检测光调整器,所述检测光调整器用于将所述至少一束检测光调整为至少两束平行的测量光束,以及所述测量光束用于照射到所述基底的待测表面上并进一步反射,以用于扫描所述待测表面上的缺陷并生成至少两个光斑;
[0009]
信息采集器,所述信息采集器用于采集经所述待测表面反射出的测量光束形成的所述光斑的光斑信息;
[0010]
处理器,所述处理器与所述信息采集器通讯连接,用于接收所述光斑信息,并用于对所述光斑信息进行分析计算,以得到所述缺陷对应的缺陷参数。
[0011]
可选的,至少两束测量光束间的间距可调,以使至少两个所述光斑间间距可调。
[0012]
可选的,所述光源部件用于发出至少两束相互平行的检测光;所述检测光调整器包括狭缝组件,所述狭缝组件接收所述检测光并用于调整所述检测光的间距,以形成至少两束间距可调的测量光束。
[0013]
可选的,所述光源部件用于发出一束所述检测光;所述检测光调整器包括狭缝组件和棱镜组件,所述狭缝组件接收所述检测光,并将所述检测光分离成至少两束所述测量
光束,所述棱镜组件接收至少两束所述测量光束,并使至少两束所述测量光束相互平行后发出。
[0014]
可选的,所述狭缝组件包括至少两个狭缝单元,至少两个狭缝单元位于所述检测光的光路上且位置可调的排布在所述棱镜组件周边。
[0015]
可选的,所述狭缝单元包括:具有至少两个第一透光孔的投影狭缝和具有一个第二透光孔的光阑,所述投影狭缝和所述光阑在沿所述检测光的光路方向上相对设置且相对位置可调整,并使所述检测光从一个所述第一透光孔和一个所述第二透光孔穿过以形成所述测量光束。
[0016]
可选的,所述基底缺陷检测装置还包括分离器,所述分离器位于经所述基底反射后的测量光束的光路上,以使至少两个所述测量光束彼此之间无串扰。
[0017]
可选的,所述分离器由至少一个第二棱镜组成。
[0018]
可选的,所述分离器位于所述信息采集器和所述基底之间;或者,所述分离器集成在所述信息采集器上。
[0019]
可选的,所述基底缺陷检测装置还包括位于所述测量光束的光路上且用于避免所述测量光束发散的第一成像镜头和第二成像镜头,所述第一成像镜头位于所述检测光调整器和所述基底之间,所述第二成像镜头位于所述基底和所述信息采集器之间。
[0020]
可选的,至少两个平行的测量光束照射到所述基底的所述待测表面上时,所述测量光束与所述待测表面具有预定夹角,所述预定夹角的角度为30
°
~60
°
。
[0021]
为解决上述问题,本发明还提供一种基底缺陷检测方法,包括:
[0022]
利用光源部件发出至少一束检测光;
[0023]
利用检测光调整器接收所述检测光,并将所述至少一束检测光调整为至束两个平行的测量光束并照射到所述基底的待测表面上并进一步反射,以用于扫描所述待测表面上的缺陷并生成至少两个光斑;
[0024]
利用所述信息采集器,采集并发出经所述待测表面反射后的测量光束形成的所述光斑的光斑信息;
[0025]
利用所述处理器接收所述光斑信息,并对所述光斑信息计算,以得到所述待测表面上的所述缺陷所对应的缺陷参数。
[0026]
可选的,所述缺陷参数包括所述缺陷的和所述待测表面之间的距离,以及所述缺陷在所述基底上的位置。
[0027]
本发明提供的一种基底缺陷检测装置中,由于将光源部件发出的至少一束测量光经检测光调整器调整后形成至少两个平行的测量光束。如此一来,可通过至少两个测量光束经一次或少次扫描即可获得基底上的多个缺陷的缺陷参数,以提升对位于基底上的缺陷的检测效率。
附图说明
[0028]
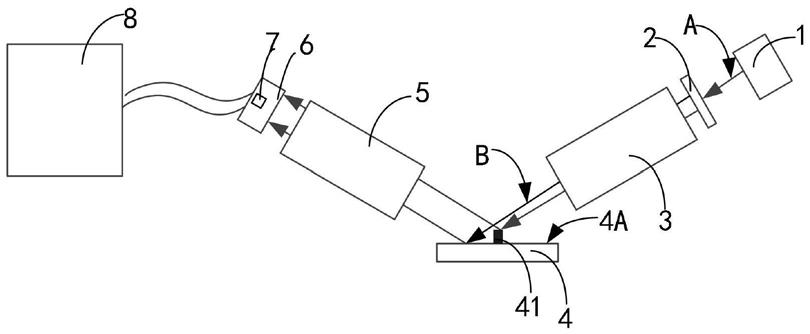
图1是本发明一实施例的基底缺陷检测装置的结构示意图。
[0029]
图2是本发明一实施例的基底缺陷检测装置中的检测光调整器的结构示意图。
[0030]
图3是本发明一实施例的基底缺陷检测装置中的狭缝单元的结构示意图。
[0031]
图4是本发明一实施例的基底缺陷检测装置中的测量光束经基底反射的示意图。
[0032]
图5是本发明一实施例的基底缺陷检测装置中的信息采集器采集的光斑信息的示意图。
[0033]
图6是本发明一实施例的基底缺陷检测装置中的测量光束照射在基底的入射角度与检测镜头光学离焦量的关系示意图。
[0034]
图7是本发明一实施例的基底缺陷检测装置中的分离器的结构示意图。
[0035]
图8是本发明一实施例的基底缺陷检测方法的方法流程图。
[0036]
图9是本发明一实施例的基底缺陷检测方法中的缺陷在所述基底上的位置的计算过程结构示意图。
[0037]
图10是本发明一实施例的基底缺陷检测方法中的缺陷和待测表面之间的距离的计算过程结构示意图。
[0038]
图中,
[0039]1‑
光源部件;
[0040]2‑
检测光调整器;
[0041]
21
‑
狭缝组件;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
211
‑
狭缝单元;
[0042]
2111
‑
投影狭缝;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2112
‑
光阑;
[0043]
2111a
‑
第一透光孔;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2112a
‑
第二透光孔;
[0044]
22
‑
棱镜组件;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
221
‑
第一棱镜;
[0045]3‑
第一成像镜头;
[0046]4‑
基底;
[0047]
41
‑
缺陷;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
4a
‑
待测表面;
[0048]5‑
第二成像镜头;
[0049]6‑
信息采集器;
[0050]7‑
分离器;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
71
‑
第二棱镜;
[0051]8‑
处理器;
[0052]
a
‑
检测光;
[0053]
b
‑
测量光束;
[0054]
b1
‑
第一测量光束;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
b2
‑
第二测量光束;
[0055]
b11
‑
第一子测量光束;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
b12
‑
第二子测量光束;
[0056]
c
‑
总测量光束。
具体实施方式
[0057]
以下结合附图和具体实施例对本发明提出的基底缺陷检测装置及基底缺陷检测方法作进一步详细说明。根据下面说明,本发明的优点和特征将更清楚。需说明的是,附图均采用非常简化的形式且均使用非精准的比例,仅用以方便、明晰地辅助说明本发明实施例的目的。
[0058]
图1是本发明一实施例的基底缺陷检测装置的结构示意图,图5是本发明一实施例的基底缺陷检测装置中的信息采集器采集的光斑信息的示意图。如图1所示,在本实施例中,所述基底4具有待测表面4a,所述待测表面4a上具有相对于所述待测表面4a凸出或内凹的缺陷41。所述基底4可以为晶圆或芯片。以及,所述缺陷41可以为位于基底4上的凸起
(bump),所述凸起例如基底4本身设计的结构例如凸起的标记,或者为在所述基底4制备过程中形成在所述基底4上的一些凸起的缺陷41。或者所述缺陷41还可以为形成在所述基底4上且相对于待测表面4a凹陷的凹槽,例如所述缺陷41可以为tsv孔(through siliconvias“通过硅片通道”),或者在所述基底4制备过程中发生的刮痕、异物被清洗后形成的凹坑等。
[0059]
进一步的,继续参图1所示,在本实施例中,所述基底缺陷检测装置包括:
[0060]
光源部件1,所述光源部件1用于发出至少一束检测光a。
[0061]
检测光调整器2,所述检测光调整器2用于接收所述检测光a,并将所述至少一束检测光a调整为至少两束平行的测量光束b,所述测量光束b用于在照射到所述基底4的所述待测表面4a上并进一步反射,以用于扫描所述待测表面4a上的多个缺陷41并生成至少两个光斑。
[0062]
信息采集器6,所述信息采集器6用于采集经所述待测表面4a反射出的所述测量光束b所形成的所述光斑的光斑信息100。
[0063]
处理器8,所述处理器8与所述信息采集器6通讯连接,用于接收所述光斑信息100,并用于对所述光斑信息100进行分析计算,以得到所述缺陷41对应的缺陷参数。
[0064]
在本实施例中,由于将光源部件1发出的至少一束测量光a经检测光调整器2调整后形成至少两个平行的测量光束b,如此一来,可通过至少两个测量光束b经一次或少次扫描即可获得所述基底4上的缺陷41的缺陷参数,以提升对位于所述基底4上的所述缺陷41的检测效率。
[0065]
其中,在本实施例中,所述光源部件1选用宽波段光源,其波长范围覆盖紫外、可见光及红外波段。具体地,所述光源部件1可选用led光源、氙灯或卤素灯,以适应不同工艺的基底4。
[0066]
以及,继续参图1所示,在本实施例中,所述的基底缺陷检测装置还包括:位于所述测量光束b的光路上且用于避免所述测量光束b发散的第一成像镜头3和第二成像镜头5,所述第一成像镜头3位于所述检测光调整器2和所述基底4之间,所述第二成像镜头5位于所述基底4和所述信息采集器6之间。在本实施例中,由于所述测量光束b射入所述第一成像镜头3和所述第二成像镜头5后,所述测量光束b被所述第一成像镜头3和所述第二成像镜头5作用后不会发散,如此以避免所述测量光束b在传播的过程中发散而导致测量所述缺陷41的缺陷参数时,导致的精度降低而使测量结果不准确的问题
[0067]
图2是本发明一实施例的基底缺陷检测装置中的检测光调整器的结构示意图。图3是本发明一实施例的基底缺陷检测装置中的狭缝单元的结构示意图。进一步的,继续参图1并结合图2所示,在本实施例中,可至少两束测量光束b的间距可调,以使至少两个所述光斑间的间距可调。具体的,所述光源部件发出一束所述检测光a,所述检测光调整器2包括狭缝组件21和棱镜组件22,所述狭缝组件21接收所述检测光a,并将所述检测光a分离成至少两束所述测量光束b,所述棱镜组件22接收至少两束所述测量光束b,并使至少两个所述测量光束b相互平行后发出。
[0068]
此外,继续参图2所示,在本实施例中,所述狭缝组件21包括至少两个狭缝单元211,至少两个狭缝单元211位于所述检测光a的光路上,且位置可调的排布在所述棱镜组件22周边。
[0069]
以及,参图3所示,所述狭缝单元211包括:具有至少两个第一透光孔2111a的投影
狭缝2111和具有一个第二透光孔2112a的光阑2112,所述投影狭缝2111和所述光阑2112在沿所述检测光a的光路方向上相对设置且相对位置可调整,并使所述检测光a从一个所述第一透光孔2111a和一个所述第二透光孔2112a穿过以形成所述测量光束b。
[0070]
具体的,继续参图2和图3所示,在本实施例中,位于所述投影狭缝2111上的所述第一透光孔2111a的狭缝宽度不同。当所述检测光a照射至所述狭缝单元211时,选定透过所述投影狭缝2111的光的光斑大小,并根据需要透过所述投影狭缝2111的光的光斑大小选中一个狭缝宽度,与需要透过所述投影狭缝2111的光的光斑直径相匹配的所述第一透光孔2111a。之后,沿所述检测光a的光路方向或沿垂直于所述检测光a的光路方向上移动所述光阑2112,以使所述光阑2112未设置所述第二透光孔2112a的部分遮挡未被选中的所述第一透光孔2111a,并使位于光阑2112上的所述第二透光孔2112a与被选中的所述第一透光孔2111a对准。如此,则所述检测光a经一个所述狭缝单元211之后形成一束具有目标参数的测量光束b,所述目标参数光斑大小,光通量等。当所述测量单元211为至少两个时,所述检测光a经至少两个所述测量单元211之后形成至少两束测量光束b。
[0071]
可选的,所述光源部件1用于发出至少两束相互平行的检测光a时,此时所述检测光调整器2也可仅包括狭缝组件21,所述狭缝组件21接收所述检测光a并用于调整所述检测光a的间距,以形成至少两束间距可调的测量光束b。所述狭缝组件21的工作原理如上述所述,在此不做具体赘述。
[0072]
进一步的,继续参图1到图3所示,在本实施例中,所述棱镜组件22包括至少一个第一棱镜221。在本实施例中,所述棱镜组件22包括两个第一棱镜221。两个所述第一棱镜221的截面为三角形,两个所述第一棱镜221相对设置以形成矩形的棱镜组件22。所述狭缝组件21也为两个,两个所述狭缝单元211分别设置在矩形的所述棱镜组件22相邻的两个矩形面的侧边,且相对所述棱镜组件22位置可调。所述检测光a照射至所述检测光调整器2之后,经两个所述狭缝单元211分束之后形成两束测量光束b。两束所述测量光束b其中之一束穿过两个第一棱镜221之后传播方向不变从所述棱镜组件22射出,其中另一的所述测量光束b则经所述棱镜的斜面反射后射出,如此使所述检测光a经所述检测光调整器2之后形成两束平行射出的所述测量光束b。
[0073]
其中,在本实施例中,所述至少两个狭缝单元211之间的相对位置,以及每个所述狭缝单元211相距所述棱镜组件22的位置均可调整、所述狭缝单元211的结构和各结构之间的位置、大小以及材料均可调整。以及,所述棱镜组件22内的所述第一棱镜221的数量、大小以及排布方式均可选择。如此,以调整形成的所述测量光束b的光通量、所述测量光束b之间的间距等参数。以满足不同缺陷41对检测精度和扫描密度的需求。上述各部件的具体结构以、排布方式以及间距等参数在此不做具体限定,以实际情况为准。上述仅说明其中一个可实施方式。
[0074]
图4是本发明一实施例的基底缺陷检测装置中的测量光束经基底反射的示意图。参图2~图3并重点参图4所示,在本实施例中,例如,所述缺陷41为凸起缺陷,以及所述检测光a经所述检测光调整器2分束之后形成相互平行的两束测量光束b,定义相互平行的两束所述测量光束b其中之一为第一测量光束b1,其中另一为第二测量光束b2。其中,所述第一测量光束b1照射至所述缺陷41顶表面,所述第二测量光束b2照射至所述基底4的所述待测表面4a上。则由于所述缺陷41为凸起缺陷,所述第一测量光束b1照射至所述缺陷41顶表面
上之后发生反射,与所述第二测量光束b2照射至所述待测表面4a上发生反射的检测位置不同。则所述信息采集器6采集到的由所述待测表面4a以及所述缺陷41反射形成的光斑信息100将不同。
[0075]
比如,如图5所示,所述第一测量光束b1照射至所述缺陷41上反射后形成如图5所示的第一光斑信息101,所述第二测量光束b2照射至所述待测表面4a上反射后形成如图5所示的第二光斑信息102。由于,所述第一光斑信息101和所述第二光斑信息102不同,则所述信息采集器6可区分出采集到的所述第一光斑信息101,并根据所述第一光斑信息101计算以获得所述缺陷41的缺陷参数。其中,在本实施例中,所述缺陷参数包括所述缺陷41的顶点距离所述待测表面4a的距离,以及所述缺陷41在所述基底4上的位置。
[0076]
图6是本发明一实施例的基底缺陷检测装置中的测量光束照射在基底的入射角度与检测镜头光学离焦量的关系示意图。结合图4和图6所示,当所述入射光照射至所述基底上的缺陷41上时,由于所述缺陷41与所述基底4的所述待测表面4a具有高度差,则经所述缺陷41反射的反射光束会发生离焦的现象。该离焦量δh的存在会导致所述缺陷41测量精度不佳。继续结合图6所示,所述离焦量δh与入射角θ相关,且当所述入射角θ为45
°
时,所述离焦量δh等于0。在本实施例中,所述入射角θ在30
°
~60
°
时,对所述缺陷41的测量精度影响较小。因此,本实施例中的所述基底4缺陷检测装置中所述测量光束b照射到所述基底4的所述待测表面4a上时,其入射角的角度范围为30
°
~60
°
。换算成所述测量光束b与所述基底4的夹角时,所述测试光束b与所述基底4的夹角的角度范围为30
°
~60
°
。即在本实施例中,当至少两个平行的测量光束b照射到所述基底4上时,所述测量光束b与所述基底4的所述待测表面4a具有预定夹角,所述预定夹角的角度为30
°
~60
°
。较佳的,所述预定夹角为45
°
,此时,所述测量光束b照射到所述待测表面4a上的离焦量为0,对所述缺陷41的测量精度最佳。
[0077]
图7是本发明一实施例的基底缺陷检测装置中的分离器的结构示意图。参图1并结合图7所示,在本实施例中,所述测量光束b照射至所述基底4的所述待测表面4a,并经所述待测表面4a反射之后至少部分所述测量光束b会混杂在一起。因此,需将至少两个所述测量光束b分离开来。因此,在本实施例中,所述基底4缺陷检测装置还包括分离器7,所述分离器7位于经所述基底4反射后的所述测量光束b的光路上,以使至少两个所述测量光束b彼此之间无串扰。
[0078]
具体的,重点参图7所示,在本实施例中,所述分离器7由至少一个第二棱镜71组成。在本实施例中,所述第二棱镜71为两个,两个所述第二棱镜71的两个面贴合组成所述分离器7。经所述基底4的测量表面4a反射后的至少两个所述测量光束b形成总测量光束c,所述总测量光束c射入所述分离器7,并在两个所述第二棱镜71的出光面处后,使得组成所述总测量光束c的所述测量光束b分离开来。可选的,可在所述第二棱镜71的出光面上贴附光学膜片或形成光栅,以分离至少两个所述测量光束b。
[0079]
此外,在本实施例中,继续参图1所示,所述分离器7可集成在所述信息采集器6上,当所述分离器7集成在所述信息采集器6上时,所述信息采集器6可以为全彩相机。以及,在本实施例中,所述分离器7还可以位于所述信息采集器6和所述基底4之间,此时所述信息采集器6可以为面阵相机。
[0080]
进一步的,在本实施例中,所述处理器8可以为计算机。即,所述信息采集器6与计算机通讯连接,所述计算机接收所述信息采集器6发出的所述光斑信息100,之后,所述计算
机内部的逻辑运算程序对所述光斑信息100进行运算以得到所述缺陷参数。
[0081]
图8是本发明一实施例的基底缺陷检测方法的方法流程图。本实施例还公开了一种基底缺陷检测方法。下面参图8并结合图1~7所示,以详细说明本实施例中的所述基底缺陷检测方法。
[0082]
在本实施例中,所述基底4具有待测表面4a,所述待测表面4a上具有相对于所述待测表面4a凸出或内凹的缺陷41,利用如上述所述的基底缺陷检测装置进行所述缺陷4的检测。以及,在本实施例中,所述缺陷检测的方法包括如下步骤s10~s40。
[0083]
在步骤s10中,利用光源部件1发出至少一束检测光a。在本实施例中,所述检测光a的波长范围涵盖紫外、可见光以及红外光波段。如此,以适应不同工艺的基底4。
[0084]
在步骤s20中,利用检测光调整器2接收所述至少一束检测光a,并将所述至少一束检测光a调整为至少两个平行的测量光束b并照射到所述基底4的所述待测表面4a上并进一步反射,以用于扫描所述待测表面4a上的缺陷41并生成至少两个光斑。
[0085]
在步骤s30中,利用所述信息采集器6,采集并发出经所述待测表面4a反射后的所述测量光束b形成所述光斑的光斑信息100。
[0086]
在步骤s40中,利用处理器8接收所述光斑信息100,并对所述光斑信息100计算,以得到所述待测表面4a上的所述缺陷41对应的缺陷参数。
[0087]
其中,在本实施例中,所述光源部件1、所述检测光调整器2、所述信息采集器6以及所述处理器8位置固定。以及,所述基底缺陷检测装置还包括移动装置(图未示),所述基底4承载在所述移动装置(图未示)上,所述移动装置(图未示)按照预定移动路线移动以带动承载于其上的所述基底4移动。如此以使所述基底测量装置完成对位于所述基底4的所述待测表面4a上的所述缺陷41的缺陷参数的测量。
[0088]
其中,在本实施来中,所述缺陷参数包括所述缺陷41和所述待测表面4a之间的距离,以及所述缺陷41在所述基底4上的位置。其中,所述缺陷41和所述待测表面4a之间的距离包括所述缺陷41上的所有点和所述待测表面4a之间的距离。
[0089]
图9是本发明一实施例的基底缺陷检测方法中的缺陷在所述基底上的位置的计算过程结构示意图。如图9所示,建立x,y平面坐标系,其中,所述x,y平面坐标系的坐标原点位于所述基底4的中心位置。所述移动装置(图未示)带动承载在其上的所述基底4从初始位置开始沿x方向呈z字形移动,直至完成所述基底4的所述待测表面4a上所有区域的检测,其中,在本实施例中,所述初始位置指所述基底4未开始移动时的位置。定义所述基底4位于所述初始位置时所述测量光束b照射至所述基底4上的点为初始点p0(x0,y0)。则假设如图所示,所述基底4的所述p
t
(x
t
,yt)点具有所述缺陷41。则所述缺陷41的位置p
t
(x
t
,yt)的横坐标x
t
根据如下公式(1)计算以得到,所述缺陷41的位置p
t
(x
t
,yt)的纵坐标yt根据如下公式(2)计算以得到。
[0090]
xt=x0 vt—公式(1)
[0091]
其中,x
t
表示:所述缺陷41的位置p
t
的横坐标;x0表示:所述测量光束b照射至所述基底4上的初始点p0的横坐标;v表示:所述基底4的移动速度;t表示:所述基底4从所述初始点p0移动到所述测量光束b照射至所述缺陷41上时的时间。以及,
[0092]
yt=y0 k*p/m—公式(2)
[0093]
其中,yt表示:所述缺陷41的位置p
t
的纵坐标;y0表示:所述测量光束b照射至所述
基底4上的初始点p0的纵坐标;k表示:所述数据采集器6上的第k个像素;p表示:所述数据采集器6上的像元的大小。m表示:所述数据采集器6的镜头成像时的倍率。
[0094]
图10是本发明一实施例的基底缺陷检测方法中的缺陷和所述待测表面之间的距离的计算过程结构示意图。如图10所示,在本实施例中,以凸起缺陷为例进行说明。所述第一测量光束b1照射在所述缺陷41顶表面靠近所述数据采集器6的最边缘的点。所述第一测量光束b1一部分照射至所述基底4的所述待测表面4a并形成第一子测量光束b11,另一部分经所述缺陷41反射后射向所述数据采集器6以形成第二子测量光束b12。则本实施例中,可通过如下公式(3)以获取所述缺陷参数包括所述缺陷41和所述待测表面4a之间的距离。
[0095][0096]
其中,h表示所述缺陷41的和所述待测表面4a之间的距离;d表示所述第一子测量光束b11和所述第二子测量光束b12之间的距离;m表示所述数据采集器6的镜头成像时的倍率;θ表示所述第一测量光束b1的入射角。
[0097]
此外,在本实施例中,还可以在所述数据采集器6和所述基底4之间设置第二成像镜头5,所述第一子测量光束b11和所述第二子测量光束b12射入所述第二成像镜头5后平行射出。
[0098]
上述描述仅是对本发明较佳实施例的描述,并非对本发明范围的任何限定,本发明领域的普通技术人员根据上述揭示内容做的任何变更、修饰,均属于权利要求书的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。