1.本发明涉及焊接加工技术领域,具体涉及一种立柱自动化焊接设备。
背景技术:
2.方形管与钢板焊接在一起构成的立柱是机械与建筑领域中常见的钢结构立柱,该类立柱在焊接的过程中,一般需要手掌力将方形管压制在钢板上进行焊接,有时甚至需要操作者对立柱进行角度转换来焊接,这种固定方式及焊接方式人力投入较大,且在焊接时方形管易与钢板移位,导致焊接点偏移,从而影响立柱焊接的成功率,虽然部分自动化焊接设备能够自动焊接立柱,但是大部分焊接设备不能够同时对多个立柱进行加工焊接,不利于提高立柱焊接加工的工作效率。
技术实现要素:
3.为了克服上述的技术问题,本发明的目的在于提供一种立柱自动化焊接设备,通过在基座的顶面开设有放置槽,在套筒与滑杆之间固定连接有压制弹簧,且滑杆的底面转动连接有接头,通过在放置槽上放置钢板,并向上移动接头使方形管放置于接头与钢板之间,释放接头在压制弹簧的弹力作用下使方形管限位固定在钢板上,省去人工扶持压制立柱,便于后期立柱焊接,通过电机带着传动轴逆时针转动,在皮带及带轮的传动作用下使两个传动轴同时带着齿轮二与驱动件上的条齿一啮合传动,从而使驱动件带着矩形框架向焊接台上开设有滑槽一的一端移动,移动过程中驱动件上的焊枪焊接对应位置的方形管与钢板的连接处,实现多个方形管底部两侧同时自动焊接,提高了立柱焊接的效率;
4.通过电机继续带着传动轴转动使齿轮二与驱动件上对应位置的弧形齿啮合传动,从而使驱动件在矩形框架里面沿着滑槽二移动,实现驱动件带着焊枪与已经焊接完成的方形管分离,便于后期基座带着立柱转动换位置焊接,当齿轮二与驱动件上的条齿二啮合传动时,驱动件带着矩形框架向背离焊接台上开设有滑槽一的一端移动,此时矩形框架带着l形连接板上的驱动机构同步移动,从而使驱动机构上的条齿三与对应位置的齿轮一啮合传动,齿轮一转动使对应位置基座同步转动90度,实现多个方形管与钢板同步转动90度,使未焊接的一侧缝隙对着焊枪,同理齿轮二再次与条齿一啮合传动实现方形管与钢板另外两侧焊接,省去人工对立柱进行角度转换来焊接,进一步提高了立柱焊接的工作效率,通过一个电机即可实现同时对多个立柱进行角度转换焊接,成本低廉。
5.本发明的目的可以通过以下技术方案实现:
6.一种立柱自动化焊接设备,包括焊接台,所述焊接台顶面的中部等间距转动连接有多个用于放置钢板的基座,多个所述基座的上方设置有用于限制方形管位置的限位机构,所述焊接台顶面的两侧均滑动连接有矩形框架,所述矩形框架的内部设置有驱动件,所述驱动件的两端均固定连接有焊枪,所述焊接台的顶面转动连接有两个传动轴,所述传动轴的顶部套接固定有驱动对应位置驱动件移动的齿轮二,所述焊接台的底面固定连接有驱动传动轴转动的电机,其中,一个所述矩形框架的底面固定连接有贯穿焊接台的l形连接
板,所述l形连接板的顶面固定连接有驱动基座转动的驱动机构,通过限位机构与基座配合使用,便于同时在焊接台上放置多个带焊接的钢板和方形管,通过电机带着传动轴转动使驱动件带着矩形框架移动,实现驱动件上的焊枪焊接方形管与钢板的连接处,通过在焊接台的底面设置有与矩形框架同步移动的驱动机构,驱动机构使基座转动从而使方形管与钢板转动,实现焊枪焊接方形管与钢板另外两侧,省去人工对立柱进行角度转换来焊接,提高了立柱焊接的工作效率。
7.进一步在于:所述基座的顶面开设有放置钢板的放置槽,所述基座的中部插接固定有转动轴,所述转动轴贯穿焊接台的底端固定连接有与驱动机构啮合的齿轮一,放置槽便于限位固定钢板,齿轮一便于与驱动机构配合传动实现改变方形管与钢板的焊接位置。
8.进一步在于:所述限位机构包括与焊接台固定连接的匚形架,所述匚形架的底面等间距固定连接有多个套筒,所述套筒的内部滑动连接有滑杆,所述滑杆与套筒之间固定连接有压制弹簧,所述滑杆的底面转动连接有接头,向上移动接头使方形管放置于接头与钢板之间,释放接头在压制弹簧的弹力作用下使方形管限位固定在钢板上,省去人工扶持压制立柱,便于后期立柱角度转换焊接。
9.进一步在于:所述驱动件包括对称分布的条齿一和条齿二,所述条齿一与条齿二的两端之间均固定连接有弧形齿,所述矩形框架的两端均开设有与对应位置弧形齿的外侧壁滑动贴靠的滑槽二,条齿一与齿轮二啮合传动实现焊接立柱,弧形齿与齿轮二啮合传动实现焊枪是否与焊接处接触,条齿二与齿轮二啮合传动实现立柱角度转换,滑槽二便于驱动件在矩形框架里面带着焊枪移动。
10.进一步在于:所述矩形框架一端的底面固定连接有凸块,所述焊接台顶面的两侧均开设有与对应位置凸块滑动连接的滑槽一,且所述焊接台的顶面开设有与l形连接板滑动连接的导向通孔,从而使l形连接板与矩形框架均能够在焊接台上平稳的移动位置。
11.进一步在于:所述传动轴贯穿焊接台的底端套接固定有带轮,两个所述带轮之间传动连接有皮带,所述电机的输出端与对应位置传动轴的底端固定连接,从而使电机能够同时带着两个传动轴同步转动。
12.进一步在于:所述驱动机构与l形连接板顶面固定连接的横梁,所述横梁两端的外侧均设置有与对应位置齿轮一啮合传动的条齿三,所述条齿三的两侧与横梁之间均设置有两个传动杆,便于控制条齿三是否与齿轮一啮合。
13.进一步在于:所述传动杆的一端与条齿三转动连接,所述传动杆的另一端固定连接有与横梁转动连接的连接轴,从而使条齿三能够在横梁的外侧移动位置。
14.进一步在于:所述横梁靠近连接轴的外侧开设有扇形缺口,所述连接轴的外侧壁固定连接有与对应位置扇形缺口滑动连接的扇形块,且所述连接轴位于横梁内部的外侧壁设置有扭转弹簧,扇形缺口与扇形块配合使条齿三只有在向背离滑槽一的方向移动时才能够与齿轮一啮合传动,扭转弹簧使条齿三与齿轮一分离后能够回到初始位置,即传动杆倾斜布置在条齿三的两侧,条齿三与横梁之间存在间隙。
15.进一步在于:所述传动轴与对应位置驱动件之间设置有限位件,所述限位件包括与传动轴转动连接的套环,所述套环的外侧壁固定连接有连接块,所述连接块背离套环的一端转动连接有滚轮,所述驱动件的底面开设有与对应位置滚轮滚动贴靠的啮合限位槽,从而使齿轮二始终与驱动件保持啮合状态。
16.本发明的有益效果:
17.1、通过在基座的顶面开设有放置槽,在套筒与滑杆之间固定连接有压制弹簧,且滑杆的底面转动连接有接头,通过在放置槽上放置钢板,并向上移动接头使方形管放置于接头与钢板之间,释放接头在压制弹簧的弹力作用下使方形管限位固定在钢板上,省去人工扶持压制立柱,便于后期立柱焊接,通过电机带着传动轴逆时针转动,在皮带及带轮的传动作用下使两个传动轴同时带着齿轮二与驱动件上的条齿一啮合传动,从而使驱动件带着矩形框架向焊接台上开设有滑槽一的一端移动,移动过程中驱动件上的焊枪焊接对应位置的方形管与钢板的连接处,实现多个方形管底部两侧同时自动焊接,提高了立柱焊接的效率;
18.2、通过电机继续带着传动轴转动使齿轮二与驱动件上对应位置的弧形齿啮合传动,从而使驱动件在矩形框架里面沿着滑槽二移动,实现驱动件带着焊枪与已经焊接完成的方形管分离,便于后期基座带着立柱转动换位置焊接,当齿轮二与驱动件上的条齿二啮合传动时,驱动件带着矩形框架向背离焊接台上开设有滑槽一的一端移动,此时矩形框架带着l形连接板上的驱动机构同步移动,从而使驱动机构上的条齿三与对应位置的齿轮一啮合传动,齿轮一转动使对应位置基座同步转动90度,实现多个方形管与钢板同步转动90度,使未焊接的一侧缝隙对着焊枪,同理齿轮二再次与条齿一啮合传动实现方形管与钢板另外两侧焊接,省去人工对立柱进行角度转换来焊接,进一步提高了立柱焊接的工作效率,通过一个电机即可实现同时对多个立柱进行角度转换焊接,成本低廉。
附图说明
19.下面结合附图对本发明作进一步的说明。
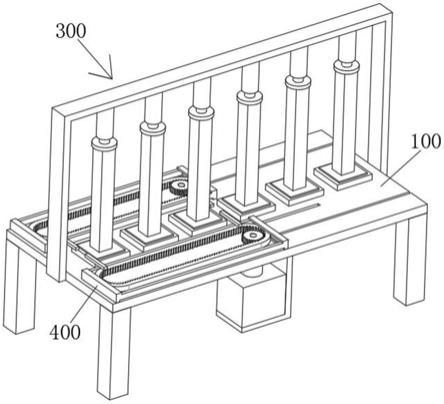
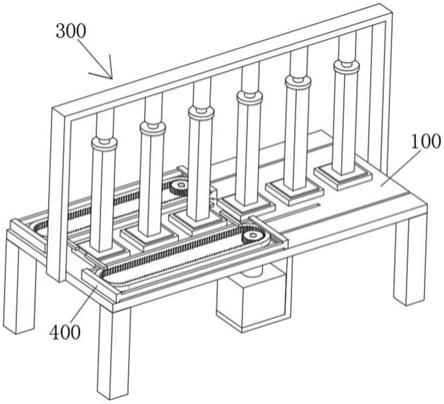
20.图1是本发明中立柱与该焊接设备整体结构示意图
21.图2
‑
3是本发明中该焊接设备不同视角结构示意图;
22.图4是本发明中焊接台及基座结构示意图;
23.图5是本发明中套筒内部结构示意图;
24.图6是本发明中矩形框架结构示意图;
25.图7是本发明中驱动件及焊枪结构示意图;
26.图8是本发明中驱动机构结构示意图;
27.图9是本发明中横梁与传动杆拆分立体结构示意图;
28.图10是本发明中驱动件与传动轴结构示意图。
29.图中:100、焊接台;110、滑槽一;120、导向通孔;200、基座;210、齿轮一;300、限位机构;310、匚形架;320、套筒;330、滑杆;331、压制弹簧;340、接头;400、矩形框架;410、l形连接板;420、滑槽二;430、凸块;500、驱动件;510、条齿一;520、条齿二;530、弧形齿;540、啮合限位槽;600、传动轴;610、齿轮二;620、限位件;700、驱动机构;710、横梁;720、条齿三;730、传动杆;731、连接轴;7311、扇形块。
具体实施方式
30.下面将结合本发明实施例,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的
实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
31.请参阅图1
‑
10所示,一种立柱自动化焊接设备,包括焊接台100,焊接台100顶面的中部等间距转动连接有多个用于放置钢板的基座200,多个基座200的上方设置有用于限制方形管位置的限位机构300,焊接台100顶面的两侧均滑动连接有矩形框架400,矩形框架400的内部设置有驱动件500,驱动件500的两端均固定连接有焊枪,焊接台100的顶面转动连接有两个传动轴600,传动轴600的顶部套接固定有驱动对应位置驱动件500移动的齿轮二610,焊接台100的底面固定连接有驱动传动轴600转动的电机,其中,一个矩形框架400的底面固定连接有贯穿焊接台100的l形连接板410,l形连接板410的顶面固定连接有驱动基座200转动的驱动机构700,通过限位机构300与基座200配合使用,便于同时在焊接台100上放置多个带焊接的钢板和方形管,通过电机带着传动轴600转动使驱动件500带着矩形框架400移动,实现驱动件500上的焊枪焊接方形管与钢板的连接处,通过在焊接台100的底面设置有与矩形框架400同步移动的驱动机构700,驱动机构700使基座200转动从而使方形管与钢板转动,实现焊枪焊接方形管与钢板另外两侧,省去人工对立柱进行角度转换来焊接,提高了立柱焊接的工作效率。
32.基座200的顶面开设有放置钢板的放置槽,基座200的中部插接固定有转动轴,转动轴贯穿焊接台100的底端固定连接有与驱动机构700啮合的齿轮一210,放置槽便于限位固定钢板,齿轮一210便于与驱动机构700配合传动实现改变方形管与钢板的焊接位置;限位机构300包括与焊接台100固定连接的匚形架310,匚形架310的底面等间距固定连接有多个套筒320,套筒320的内部滑动连接有滑杆330,滑杆330与套筒320之间固定连接有压制弹簧331,滑杆330的底面转动连接有接头340,向上移动接头340使方形管放置于接头340与钢板之间,释放接头340在压制弹簧331的弹力作用下使方形管限位固定在钢板上,省去人工扶持压制立柱,便于后期立柱角度转换焊接。
33.驱动件500包括对称分布的条齿一510和条齿二520,条齿一510与条齿二520的两端之间均固定连接有弧形齿530,矩形框架400的两端均开设有与对应位置弧形齿530的外侧壁滑动贴靠的滑槽二420,条齿一510与齿轮二610啮合传动实现焊接立柱,弧形齿530与齿轮二610啮合传动实现焊枪是否与焊接处接触,条齿二520与齿轮二610啮合传动实现立柱角度转换,滑槽二420便于驱动件500在矩形框架400里面带着焊枪移动;矩形框架400一端的底面固定连接有凸块430,焊接台100顶面的两侧均开设有与对应位置凸块430滑动连接的滑槽一110,且焊接台100的顶面开设有与l形连接板410滑动连接的导向通孔120,从而使l形连接板410与矩形框架400均能够在焊接台100上平稳的移动位置。
34.传动轴600贯穿焊接台100的底端套接固定有带轮,两个带轮之间传动连接有皮带,电机的输出端与对应位置传动轴600的底端固定连接,从而使电机能够同时带着两个传动轴600同步转动;驱动机构700与l形连接板410顶面固定连接的横梁710,横梁710两端的外侧均设置有与对应位置齿轮一210啮合传动的条齿三720,条齿三720的两侧与横梁710之间均设置有两个传动杆730,便于控制条齿三720是否与齿轮一210啮合;传动杆730的一端与条齿三720转动连接,传动杆730的另一端固定连接有与横梁710转动连接的连接轴731,从而使条齿三720能够在横梁710的外侧移动位置。
35.横梁710靠近连接轴731的外侧开设有扇形缺口,连接轴731的外侧壁固定连接有
与对应位置扇形缺口滑动连接的扇形块7311,且连接轴731位于横梁710内部的外侧壁设置有扭转弹簧,扇形缺口与扇形块7311配合使条齿三720只有在向背离滑槽一110的方向移动时才能够与齿轮一210啮合传动,扭转弹簧使条齿三720与齿轮一210分离后能够回到初始位置,即传动杆730倾斜布置在条齿三720的两侧,条齿三720与横梁710之间存在间隙;传动轴600与对应位置驱动件500之间设置有限位件620,限位件620包括与传动轴600转动连接的套环,套环的外侧壁固定连接有连接块,连接块背离套环的一端转动连接有滚轮,驱动件500的底面开设有与对应位置滚轮滚动贴靠的啮合限位槽540,从而使齿轮二610始终与驱动件500保持啮合状态。
36.工作原理:使用时,将待焊接的钢板放到基座200顶面的放置槽里面,向上推动接头340将方形管放到接头340与对应位置钢板之间,释放接头340,在压制弹簧331的弹力作用下使接头340将方形管限位固定在钢板顶面的中部,开启电机,电机带着其中一个传动轴600逆时针转动,在皮带的传动下使另一个传动轴600同步转动,传动轴600转动使齿轮二610逆时针转动,齿轮二610与驱动件500上的的条齿一510啮合传动使驱动件500带着矩形框架400向焊接台100上开设有滑槽一110的一端移动,移动过程中驱动件500上的焊枪焊接对应位置的方形管与钢板的连接处,实现方形管与钢板相对的一侧同步被焊接,在矩形框架400移动的同时,l形连接板410带着驱动机构700同步移动,横梁710上的条齿三720不与对应位置的齿轮一210啮合传动(当条齿三720经过对应位置齿轮一210时传动杆730带着条齿三720移动使条齿三720与齿轮一210分离),当矩形框架400移动到滑槽一110一端时完成初步焊接,即整个条齿一510均完成与齿轮二610啮合传动;
37.当需要转换角度焊接时,电机继续带着传动轴600转动使齿轮二610与驱动件500上对应位置的弧形齿530啮合传动,使驱动件500在矩形框架400里面沿着滑槽二420移动,实现驱动件500带着焊枪与已经焊接完成的方形管分离,接着条齿二520与对应位置齿轮二610啮合传动,驱动件500带着矩形框架400向背离焊接台100上开设有滑槽一110的一端移动,该移动过程焊枪不与方形管接钢板接触,且关闭焊枪,与此同时矩形框架400带着l形连接板410上的驱动机构700同步移动,驱动机构700上的条齿三720在经过对应位置齿轮一210时与其啮合传动,啮合传动时传动杆730垂直布置在条齿三720与横梁710之间,条齿三720带着对应位置齿轮一210转动90度,实现多个方形管与钢板同步转动90度,使未焊接的一侧缝隙对着焊枪,同理齿轮二610再次与条齿一510啮合传动实现方形管与钢板另外两侧焊接。
38.在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
39.以上内容仅仅是对本发明所作的举例和说明,所属本技术领域的技术人员对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,只要不偏离发明或者超越本权利要求书所定义的范围,均应属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。