1.本发明涉及在将驱动力源所输出的转矩向驱动轮传递的车辆的动力传递装置中使用的接合机构的控制装置。
背景技术:
2.在日本特开2009
‑
222102中记载了具备啮合离合器的车辆的控制装置。该日本特开2009
‑
222102中所记载的控制装置具备构成啮合离合器的第1接合构件(输入侧构件)和第2接合构件(输出侧构件)、以及使第1接合构件的齿与第2接合构件的齿接合、释放的致动器,还具备向致动器发出开始接合的指令的接合开始单元、和在使致动器工作后向抑制第1接合构件的旋转的方向施加转矩的转矩施加单元。并且,构成为,在第1接合构件与第2接合构件的转速之差为预定的转速以下的情况下使所述致动器工作,在该致动器工作后抑制第1接合构件的旋转变化。
3.另外,在日本特开2020
‑
075553中记载了具备发动机和马达作为驱动力源的混合动力车辆。该混合动力车辆具备具有多个旋转要素的动力分配机构。具体而言,该动力分配机构具有两组行星齿轮机构,在这些行星齿轮机构的旋转要素中的任一旋转要素连结有发动机,在另一旋转要素连结有马达,在又一旋转要素连结有驱动轮。另外,在一方的行星齿轮机构的一个旋转要素与另一方的行星齿轮机构的一个旋转要素之间设置有第1离合机构,还设置有将另一方的旋转要素中的预定的一对旋转要素彼此连结的第2离合机构。并且,混合动力车辆构成为,通过将第1离合机构设为接合状态来设定从发动机输出的转矩中的向驱动轮侧传递的转矩较大的lo模式,通过将第2离合机构设为接合状态来设定从发动机输出的转矩中的向驱动轮侧传递的转矩较小的hi模式。此外,第1离合机构和第2离合机构由与上述的日本特开2009
‑
222102同样的啮合离合器构成。
技术实现要素:
4.如上述的日本特开2009
‑
222102的控制装置所记载的那样,在使离合机构接合时,在将离合机构的输入侧与输出侧的转速差控制为预定的转速以下之后控制致动器来进行接合动作。上述的转速差通常被设定为能够容许接合时的冲击的预定的转速差,若是上述的日本特开2009
‑
222102、日本特开2020
‑
075553的啮合离合器,则被设为不论在输入侧与输出侧的牙嵌式齿彼此不干涉还是彼此干涉了的情况下都能够完成接合的转速差。并且,关于使接合构件彼此接近的致动器的推力(和按压力),与该预定的转速差相应的值成为设计值。另一方面,致动器的推力有时根据该致动器的温度、或使致动器动作的电源部的状态而降低。例如在致动器的温度比预定温度高的情况下,有时无法输出预先设定的推力(设计值)。同样地,在电源部的电池电量降低的情况下,行程(stroke)速度降低,有时无法输出预定的推力。在像这样致动器的推力降低了的情况下,可能无法完成离合机构的接合、或者接合动作所需的时间大幅度地增大。另外,在如日本特开2020
‑
075553所记载的混合动力车辆那样使离合机构接合来切换行驶模式的情况下,到完成该行驶模式的切换为止的时间可能
会延长(或者无法完成切换)。进而,虽然也设想另行设置能够在致动器的推力降低了的情况下,输出预定的推力的大的致动器,但在这样的情况下会发生向车辆的搭载性降低、或成本上升等不良情况。
5.本发明是着眼于上述的技术课题而做出的发明,目的在于提供一种即使在致动器的推力降低了的情况下,也能够可靠地进行接合机构的接合动作的接合机构的控制装置。
6.为了达成上述的目的,本发明提供一种接合机构的控制装置,具备:接合机构,具有能够相对旋转的第1接合要素和第2接合要素;致动器,在使所述接合机构接合时产生使所述第1接合要素与所述第2接合要素接近的推力;以及控制器,控制所述接合机构,所述接合机构的控制装置构成为,在所述第1接合要素的转速与所述第2接合要素的转速之差即转速差小于预先设定的预定值的情况下,利用所述致动器的推力来进行所述第1接合要素与所述第2接合要素的接合,所述接合机构的控制装置的特征在于,所述控制器构成为,在使所述第1接合要素与所述第2接合要素接合时,检测表示包括所述致动器的推力的动作状态的参数,根据所检测出的参数的值算出使所述第1接合要素与所述第2接合要素接合时的目标转速差,将所述转速差控制为所算出的目标转速差。
7.另外,在本发明中,可以是,还具备检测所述参数的传感器、算出所述目标转速差的目标转速差算出部、以及将所述转速差控制为所述目标转速差的转速差控制部,所述控制器构成为,在使所述第1接合要素与所述第2接合要素接合时,由所述传感器来检测所述参数的值,由所述目标转速差算出部算出与所检测出的参数相应的所述目标转速差,由所述转速差控制部将所述转速差控制为所述目标转速差。
8.另外,在本发明中,可以是,所述控制器构成为,在表示所述致动器的动作状态的参数的值偏离预先设定的预定值的情况下,将所述转速差控制为所述目标转速差。
9.另外,在本发明中,可以是,构成为,所述参数的值从所述预定值偏离的范围越大,则将所述目标转速差设定得越小。
10.另外,在本发明中,可以是,所述参数包括所述致动器的温度、使所述致动器动作的电源部的电压、以及所述致动器的移动速度中的至少任一个参数。
11.另外,在本发明中,可以是,所述接合机构是在所述第1接合要素和所述第2接合要素分别形成有牙嵌式齿的啮合离合器。
12.另外,在本发明中,可以是,具备第1马达作为驱动力源,所述第1接合要素与所述第2接合要素中的任一方旋转要素构成为,连结于所述第1马达并且转速与所述第1马达的转速的变化联动地发生变化,并且构成为,通过控制所述第1马达将所述转速差控制为所述目标转速差。
13.并且,在本发明中,可以是,所述接合机构搭载于车辆,所述车辆具有发动机、第1马达以及第2马达作为驱动力源,所述车辆还具备第1差动机构和第2差动机构,所述第1差动机构通过连结着所述发动机的第1旋转要素、连结着所述第1马达的第2旋转要素、以及向驱动轮输出转矩的第3旋转要素来进行差动作用,所述第2差动机构通过连结着所述第2马达的第4旋转要素、连结于所述第3旋转要素的第5旋转要素、以及第6旋转要素来进行差动作用,所述接合机构包括第1接合机构和第2接合机构,所述第1接合机构构成为,将所述第6旋转要素与所述第1旋转要素连结或者解除其连结,所述第2接合机构构成为,将所述第4旋转要素、所述第5旋转要素以及所述第6旋转要素中的至少任意两个旋转要素连结或者解除
其连结,所述车辆能够设定包括第1行驶模式、第2行驶模式以及单模式的多个行驶模式,所述第1行驶模式是通过使所述第1接合机构接合而设定的模式,所述第2行驶模式是通过使所述第2接合机构接合来设定、并且与所述第1行驶模式相比向所述驱动轮传递的转矩小的模式,所述单模式是使所述第1接合机构和所述第2接合机构释放且仅利用所述第2马达的驱动转矩来进行行驶的模式,所述控制器构成为,在从所述单模式转变为所述第1行驶模式的情况下,使所述第1接合机构接合,在从所述单模式转变为所述第2行驶模式的情况下,使所述第2接合机构接合。
14.根据本发明,构成为,控制为与致动器能够输出的推力相应的转速差来进行接合机构的接合动作。具体而言,构成为,检测影响致动器的推力的参数的值,基于所检测出的值算出接合机构的目标转速差。并且构成为,将接合机构的转速差控制为所述目标转速差。因此,例如即使在致动器的推力因致动器的温度、电源部的电压降低等某些要因而降低了的情况下,由于所述目标转速差与当前的致动器能够输出的推力相对应,所以也能够避免或抑制接合机构的接合不完成等不良情况的发生。
15.另外,根据本发明,如上所述,根据致动器能够输出的推力来控制转速差,所以能够避免例如为了以预先设定的预定的转速差(设计值)进行接合而设置能够产生更大的推力的致动器等新设机构的情况。换言之,能够避免或抑制向车辆的搭载性的降低、和因进行搭载产生的成本的增大。
16.并且,根据本发明,能够可靠地进行接合机构的接合,由此能够顺利地进行伴随着接合机构的连结而进行的行驶模式的切换。
附图说明
17.以下将参照附图说明本发明的示例性实施方式的特征、优点以及技术和产业意义,在附图中同样的附图标记表示同样的要素,并且其中:
18.图1是用于说明驱动装置的一例的骨架图。
19.图2是用于说明离合机构的构成例的示意图。
20.图3是用于说明电子控制装置(ecu)的构成的框图。
21.图4是总结地示出各行驶模式下的离合机构、制动机构的接合和释放的状态、马达的运转状态、有无发动机的驱动的图表。
22.图5是用于说明hv
‑
hi模式下的动作状态的共线图。
23.图6是用于说明hv
‑
lo模式下的动作状态的共线图。
24.图7是用于说明直接连结模式下的动作状态的共线图。
25.图8是用于说明ev
‑
lo模式下的动作状态的共线图。
26.图9是用于说明ev
‑
hi模式下的动作状态的共线图。
27.图10是用于说明单模式下的动作状态的共线图。
28.图11是示出在选择了cs模式时用于确定各行驶模式的映射的一例的图。
29.图12是示出在选择了cd模式时用于确定各行驶模式的映射的一例的图。
30.图13是用于说明本发明的实施方式中的控制例的流程图。
31.图14是示出设定目标转速差的映射的图。
32.图15是用于说明执行了图13所示的控制例的情况下的各参数的变化的时间图。
具体实施方式
33.基于图示的实施方式对本发明进行说明。此外,以下所说明的实施方式只不过是将本发明具体化了的情况下的一例,并不对本发明构成限定。参照图1对本发明的实施方式中的混合动力车辆(以下,记为车辆)ve的一例进行说明。图1示出用于驱动前轮(驱动轮)1r、1l的驱动装置2,驱动装置2是具备发动机(eng)3和两个马达4、5作为驱动力源的所谓的双马达型的驱动装置。第1马达4由具有发电功能的马达(即电动发电机:mg1)构成,并且构成为,通过第1马达4来控制发动机3的转速,并且利用由第1马达4发出的电力来驱动第2马达5,将该第2马达5所输出的转矩添加为用于行驶的驱动力。此外,第2马达5可以由具有发电功能的马达(即电动发电机:mg2)构成。
34.在发动机3连结有相当于本发明的实施方式中的差动机构的动力分配机构6。该动力分配机构6由分配部7和变速部8构成,所述分配部7的主要功能是将发动机3所输出的转矩向第1马达4侧和输出侧分配,所述变速部8的主要功能是变更该转矩的分配率。
35.分配部7是通过三个旋转要素进行差动作用的构成即可,可以采用行星齿轮机构。在图1所示的例子中,由单小齿轮型的行星齿轮机构(第1差动机构)构成。图1所示的分配部7具有太阳轮9、相对于太阳轮9配置在同心圆上的作为内齿轮的齿圈10、配置在上述的太阳轮9与齿圈10之间并且与太阳轮9和齿圈10啮合的小齿轮11、以及将小齿轮11保持为能够进行自转和公转的行星架12。此外,行星架12相当于本发明的实施方式中的“第1旋转要素”,太阳轮9相当于本发明的实施方式中的“第2旋转要素”,齿圈10相当于本发明的实施方式中的“第3旋转要素”。
36.发动机3所输出的动力构成为向所述行星架12输入。具体而言,在发动机3的输出轴13连结有动力分配机构6的输入轴14,该输入轴14连结于行星架12。此外,也可以替代将行星架12与输入轴14直接连结的构成,而经由齿轮机构等传动机构(未图示)将行星架12与输入轴14连结。另外,也可以在该输出轴13与输入轴14之间配置减振机构、变矩器等机构(未图示)。
37.在太阳轮9连结有第1马达4。在图1所示的例子中,分配部7和第1马达4配置在与发动机3的旋转中心轴线相同的轴线上,第1马达4隔着分配部7配置在与发动机3相反的一侧。进而,变速部8在该分配部7与发动机3之间,在与上述的分配部7和发动机3相同的轴线上,沿该轴线的方向排列地配置。
38.变速部8由单小齿轮型的行星齿轮机构构成。即,变速部8与上述的分配部7同样,具有太阳轮15、相对于太阳轮15配置在同心圆上的作为内齿轮的齿圈16、配置在上述的太阳轮15与齿圈16之间并且与上述的太阳轮15和齿圈16啮合的小齿轮17、以及将小齿轮17保持为能够进行自转和公转的行星架18。因此,变速部8成为通过太阳轮15、齿圈16、以及行星架18这三个旋转要素进行差动作用的差动机构(第2差动机构)。在该变速部8中的太阳轮15连结有分配部7中的齿圈10。另外,在变速部8中的齿圈16连结有输出齿轮19。此外,上述的齿圈16相当于本发明的实施方式中的“第4旋转要素”,太阳轮15相当于本发明的实施方式中的“第5旋转要素”,行星架18相当于本发明的实施方式中的“第6旋转要素”。
39.为了使得上述的分配部7与变速部8构成复合行星齿轮机构而设置有第1离合机构(第1接合机构)cl1。第1离合机构cl1构成为,将变速部8中的行星架18选择性地连结于分配部7中的行星架12和输入轴14。具体而言,第1离合机构cl1具有旋转构件12a、12b,该旋转构
件12a、12b通过彼此接合来传递转矩,另外通过彼此释放来切断转矩。一方的旋转构件12a连结于输入轴14,另一方的旋转构件12b连结于行星架18。上述的旋转构件12a、12b中的一方相当于本发明的实施方式中的“第1接合要素”,另一方相当于本发明的实施方式中的“第2接合要素”。该第1离合机构cl1可以是湿式多板离合器等摩擦式的离合机构,或者也可以是牙嵌式离合器等啮合式的离合机构。或者,也可以是构成为通过输入控制信号来切换连结状态和释放状态、并且在没有输入控制信号的情况下维持即将不再输入控制信号之前的状态(连结状态或释放状态)的所谓常态保持(normal stay)型的离合机构。通过使该第1离合机构cl1接合,分配部7中的行星架12与变速部8中的行星架18连结,从而形成如下的复合行星齿轮机构,其中,分配部7中的行星架12与变速部8中的行星架18成为输入要素,另外分配部7中的太阳轮9成为反力要素,进而变速部8中的齿圈16成为输出要素。即,复合行星齿轮机构构成为,能够使输入轴14、第1马达4的输出轴4a、后述的从动齿轮26进行差动旋转。
40.进而,设置有用于使变速部8的整体一体化的第2离合机构(第2接合机构)cl2。该第2离合机构cl2是用于将变速部8中的行星架18与齿圈16或太阳轮15、或者将太阳轮15与齿圈16连结等的将至少任意两个旋转要素连结的离合机构,可以由摩擦式、啮合式、或常态保持型的离合机构构成。在图1所示的例子中,第2离合机构cl2构成为,将变速部8中的行星架18与齿圈16连结。具体而言,第2离合机构cl2具有旋转构件18a、18b,该旋转构件18a、18b通过彼此接合来传递转矩,另外通过彼此释放来切断转矩。一方的旋转构件18a连结于行星架18,另一方的旋转构件18b连结于齿圈16。上述的旋转构件18a、18b中的一方相当于本发明的实施方式中的“第1接合要素”,另一方相当于本发明的实施方式中的“第2接合要素”。
41.图2是用于说明第1离合机构cl1和第2离合机构cl2的构成的一例的示意图。由于上述的第1离合机构cl1和第2离合机构cl2均能够同样地构成,所以在图2的说明中,例示出第1离合机构cl1。图2所示的第1离合机构cl1具有彼此相对且能够相对旋转的两个旋转构件12a、12b,在上述的旋转构件12a、12b分别形成有牙嵌式齿20、21。在其中一方的旋转构件12b连结有产生与液压、电磁力等相应的按压力和推力的致动器(act)22。在图2所示的例子中,设置有接受致动器22的按压力和推力的受压构件23。受压构件23以与一方的旋转构件12b一体地旋转的方式设置于该一方的旋转构件12b的背面(与形成有牙嵌式齿20的面相反的一侧的面)。在该受压构件23与一方的旋转构件12b之间设置有弹簧等弹性构件24。
42.另外,在图2所示的第1离合机构cl1中,为了即使在一方的旋转构件12a与另一方的旋转构件12b存在转速差的情况下也能够从释放状态切换为接合状态、或者为了抑制一方的旋转构件12a与另一方的旋转构件12b的相位大致一致而牙嵌式齿20、21的齿顶彼此接触而无法接合的情况,以与对方侧的牙嵌式齿21(20)相对的顶端部变细的方式对各自的牙嵌式齿20、21实施倒角处理。具体而言,在假设各旋转构件12a、12b沿由图2中的箭头所示的方向旋转的情况下,一方的牙嵌式齿20的旋转方向上的先行侧的倒角形成得比后行侧的倒角大,另一方的牙嵌式齿21的旋转方向上的先行侧的倒角形成得比后行侧的倒角小。
43.此外,在将图2所示的离合机构采用为第1离合机构cl1的情况下,例如,采用输入轴14或行星架12或与它们一体地旋转的构件作为另一方的旋转构件12b,采用行星架18或与其一体地旋转的构件作为一方的旋转构件12a即可。另外,在将离合机构采用为第2离合机构cl2的情况下,采用行星架18或与其一体地旋转的构件作为一方的旋转构件12a,采用齿圈16或与其一体地旋转的构件作为另一方的旋转构件12b即可。
44.此外,例如,也可以是具备通过沿形成于滚筒的凸轮槽动作来切换第1离合机构cl1的接合状态与释放状态的套筒、通过沿该凸轮槽动作来切换第2离合机构cl2的接合状态与释放状态的套筒、以及控制该滚筒的旋转角的一个致动器的构成。
45.与上述的发动机3、分配部7或变速部8的旋转中心轴线平行地配置有中间轴(counter shaft)25。啮合于所述输出齿轮19的从动齿轮26安装于该中间轴25。另外,在中间轴25安装有传动齿轮27,该传动齿轮27啮合于作为终减速器的差速齿轮单元28中的齿圈29。进而,在所述从动齿轮26啮合有安装于第2马达5中的转子轴30的传动齿轮31。因此,构成为,通过上述的从动齿轮26的部分对从所述输出齿轮19输出的动力或转矩添加第2马达5所输出的动力或转矩。构成为,将这样合成的动力或转矩从差速齿轮单元28向左右的传动轴32输出,该动力、转矩向前轮1r、1l传递。
46.此外,在驱动装置2设置有摩擦式或啮合式的制动机构(第3接合机构)b1,所述制动机构(第3接合机构)b1用于在将第1马达4作为用于行驶的驱动力源的情况下停止发动机3的旋转。即,制动机构b1设置于预定的固定部与输出轴13或输入轴14之间,并且构成为,通过进行接合而将输出轴13或输入轴14固定,从而能够使分配部7中的行星架12、变速部8中的行星架18作为反力要素发挥作用,使分配部7中的太阳轮9作为输入要素发挥作用。此外,制动机构b1只要能够在第1马达4输出了驱动转矩的情况下产生反力转矩即可,不限于将输出轴13或输入轴14完全固定的构成,只要能够使所要求的反力转矩作用于输出轴13或输入轴14即可。或者也可以设置如下单向离合器作为制动机构b1,该单向离合器禁止输出轴13、输入轴14向与在发动机3的驱动时旋转的方向相反的方向旋转。
47.在第1马达4连接有具备变换器、转换器等的第1电力控制装置33,在第2马达5连接有具备变换器、转换器等的第2电力控制装置34,上述的各电力控制装置33、34电连结于电源部35。电源部35包括由锂离子电池、电容器、全固态电池等构成的主电池(驱动用电池)35a、和用于向上述的致动器22等辅机供给电力的辅机电池35b。另外,上述第1电力控制装置33与第2电力控制装置34构成为能够相互供给电力。具体而言,构成为,在伴随第1马达4输出反力转矩而作为发电机发挥作用的情况下,能够将由第1马达4发出的电力向第2马达5供给。
48.此外,如上所述,上述的主电池35a由锂离子电池、电容器、全固态电池等构成。由于上述各蓄电装置各自的特性不同,所以在车辆ve中不限于由单一种类的装置构成主电池,也可以考虑各装置的特性并进行组合而构成多个蓄电装置。
49.设置有用于控制上述的各电力控制装置33、34中的变换器、转换器、发动机3、各离合机构cl1、cl2以及制动机构b1的电子控制装置(ecu)36。该ecu36相当于本发明的实施方式中的“控制器”,以微计算机为主体而构成。图3是用于说明ecu36的构成的一例的框图。在图3所示的例子中,ecu36由综合ecu37、mg
‑
ecu38、发动机ecu39、以及离合器ecu40构成。
50.综合ecu37构成为,基于从搭载于车辆ve的各种传感器输入的数据、和预先存储的映射、运算式等进行运算,将该运算结果作为指令信号向mg
‑
ecu38、发动机ecu39以及离合器ecu40输出。在图3中示出向综合ecu37输入的来自各种传感器的数据的一例。向综合ecu37输入车速、加速器开度、第1马达(mg1)4的转速、第2马达(mg2)5的转速、发动机3的输出轴13的转速(发动机转速)、变速部8中的中间轴25的转速即输出转速、设置于各离合机构cl1、cl2、制动机构b1的活塞(致动器)的行程量、电源部35的温度和电压、各电力控制装置
33、34的温度、第1马达4的温度、第2马达5的温度、对分配部7、变速部8等进行润滑的油(atf)的温度、各电池35a、35b的充电剩余量(soc)、滚筒的旋转角等数据。另外,如图3所示,综合ecu37具备算出各离合机构cl1、cl2的目标转速差的目标转速差算出部37a、和向该目标转速差进行控制的转速差控制部37b。
51.然后,基于向综合ecu37输入的数据等求出第1马达4的运转状态(输出转矩、转速)、第2马达5的运转状态(输出转矩、转速),并将这些所求出的数据作为指令信号向mg
‑
ecu38输出。同样地,基于向综合ecu37输入的数据等求出发动机3的运转状态(输出转矩、转速),并将所求出的数据作为指令信号向发动机ecu39输出。同样地,基于向综合ecu37输入的数据等求出各离合机构cl1、cl2以及制动机构b1的传递转矩容量(包括“0”),并将这些所求出的数据作为指令信号向离合器ecu40输出。
52.mg
‑
ecu38基于像上述那样从综合ecu37输入的数据求出应该向各马达4、5通入的电流的电流值,并向各马达4、5输出指令信号。各马达4、5是交流式马达,所以上述的指令信号包括应该由变换器生成的电流的频率、应该由转换器升压的电压值等。
53.发动机ecu39基于像上述那样从综合ecu37输入的数据求出用于设定电子节气门的开度的电流值、脉冲数,用于利用点火装置使燃料着火的电流值、脉冲数、用于设定egr(exhaust gas recirculation:排气再循环)阀的开度的电流值、脉冲数、用于设定进气门、排气门的开度的电流的电流值、脉冲数等指令值,并向各阀/气门、装置输出指令信号。即,从发动机ecu39输出用于控制发动机3的输出(功率)、发动机3的输出转矩或发动机转速的指示信号。
54.离合器ecu40基于像上述那样从综合ecu37输入的数据求出应该向对各离合机构cl1、cl2以及制动机构b1的接合压力进行设定的致动器通电的指令值,并向各致动器输出指令信号。
55.上述的驱动装置2能够设定hv行驶模式和ev行驶模式,所述hv行驶模式是从发动机3输出驱动转矩来进行行驶的模式,所述ev行驶模式是不从发动机3输出驱动转矩而从第1马达4、第2马达5输出驱动转矩来进行行驶的模式。进而,关于hv行驶模式,能够设定在使第1马达4以低转速旋转的情况下(包括“0”转速)与变速部8的齿圈16的转速相比发动机3(或输入轴14)的转速成为高转速的hv
‑
lo模式、与变速部8的齿圈16的转速相比发动机3(或输入轴14)的转速成为低转速的hv
‑
hi模式、以及变速部8的齿圈16的转速与发动机3(或输入轴14)的转速相同的直接连结模式(固定档模式)。此外,在hv
‑
lo模式和hv
‑
hi模式下,hv
‑
lo模式的转矩的增大率大。
56.另外,进而,关于ev行驶模式,能够设定从第1马达4和第2马达5输出驱动转矩的双模式、和不从第1马达4输出驱动转矩而仅从第2马达5输出驱动转矩的单模式(切离模式)。进而,关于双模式,能够设定从第1马达4输出的转矩的增大率较大的ev
‑
lo模式、和从第1马达4输出的转矩的增大率比ev
‑
lo模式小的ev
‑
hi模式。此外,在单模式下能够实现在使第1离合机构cl1接合了的状态下仅从第2马达5输出驱动转矩而进行的行驶、在使第2离合机构cl2接合了的状态下仅从第2马达5输出驱动转矩而进行的行驶、或者在使各离合机构cl1、cl2释放了的状态下仅从第2马达5输出驱动转矩而进行的行驶。
57.上述的各行驶模式通过控制第1离合机构cl1、第2离合机构cl2、制动机构b1、以及发动机3、各马达4、5来设定。在图4中以图表示出上述的行驶模式、和各行驶模式下的第1离
合机构cl1、第2离合机构cl2、制动机构b1的接合和释放的状态、第1马达4和第2马达5的运转状态、有无来自发动机3的驱动转矩的输出的一例。图中的符号
“●”
表示接合的状态,符号
“‑”
表示释放的状态,符号“g”意味着主要作为发电机进行运转,符号“m”意味着主要作为马达进行运转,空栏意味着不作为马达和发电机发挥作用、或者第1马达4、第2马达5不参与驱动的状态,“驱动(on)”表示从发动机3输出驱动转矩的状态,“不驱动(off)”表示不从发动机3输出驱动转矩的状态。此外,使上述的第1离合机构cl1接合而设定的行驶模式相当于本发明的实施方式中的“第1行驶模式”,使第2离合机构cl2接合而设定的行驶模式相当于本发明的实施方式中的“第2行驶模式”。
58.在图5~图10中示出用于说明设定了各行驶模式的情况下的动力分配机构6的各旋转要素的转速、和发动机3、各马达4、5的转矩的方向的共线图。共线图是隔开齿轮比的间隔而彼此平行地引出表示动力分配机构6中的各旋转要素的直线,将离与这些直线正交的基线的距离表示为各旋转要素的转速的图,与表示各旋转要素的直线重叠的箭头表示转矩的方向,并且用箭头的长度表示该转矩的大小。
59.如图5所示,在hv
‑
hi模式下,从发动机3输出驱动转矩,使第2离合机构cl2接合,并且从第1马达4输出反力转矩。另外,如图5所示,在hv
‑
lo模式下,从发动机3输出驱动转矩,使第1离合机构cl1接合,并且从第1马达4输出反力转矩。将设定了上述hv
‑
hi模式、hv
‑
lo模式的情况下的第1马达4的转速控制成使得考虑到发动机3的燃料经济性、第1马达4的驱动效率等的驱动装置2整体的效率(将消耗能量除以前轮1r、1l的能量而得到的值)最佳。能够使上述的第1马达4的转速无级地连续地发生变化,基于该第1马达4的转速和车速来确定发动机转速。因此,动力分配机构6能够作为无级变速器发挥作用。
60.在通过像上述那样从第1马达4输出反力转矩而第1马达4作为发电机发挥作用的情况下,发动机3的动力的一部分通过第1马达4变换为电能。并且,从发动机3的动力中除去通过第1马达4变换为了电能的动力部分后的动力向变速部8中的齿圈16传递。从该第1马达4输出的反力转矩根据经由动力分配机构6从发动机3向第1马达4侧传递的转矩的分配率来确定。经由该动力分配机构6从发动机3向第1马达4侧传递的转矩与向齿圈16侧传递的转矩之比,即动力分配机构6中的转矩的分配率在hv
‑
lo模式和hv
‑
hi模式下不同。
61.具体而言,在将向第1马达4侧传递的转矩设为“1”的情况下,在hv
‑
lo模式下向齿圈16侧传递的转矩的比例即转矩分配率成为“1/(ρ1
×
ρ2)”,在hv
‑
hi模式下该转矩分配率成为“1/ρ1”。即,关于从发动机3输出的转矩中的向齿圈16传递的转矩的比例,在hv
‑
lo模式下成为“1/(1
‑
(ρ1
×
ρ2))”,在hv
‑
hi模式下成为“1/(ρ1 1)”。在此,“ρ1”是分配部7的齿轮比(齿圈10的齿数与太阳轮9的齿数的比率),“ρ2”是变速部8的齿轮比(齿圈16的齿数与太阳轮15的齿数的比率)。此外,ρ1和ρ2是比“1”小的值。因此,在设定了hv
‑
lo模式的情况下,与设定hv
‑
hi模式的情况相比,向齿圈16传递的转矩的比例变大。
62.此外,在使发动机3的输出增大而使发动机3的转速增大的情况下,发动机3的输出中减去为了使发动机3的转速增大所需要的功率后得到的功率所对应的转矩成为从发动机3输出的转矩。并且,由第1马达4发出的电力向第2马达5供给。在该情况下,根据需要,充入了主电池35a的电力也可向第2马达5供给。
63.在直接连结模式下,如图7所示,通过使各离合机构cl1、cl2接合,动力分配机构6中的各旋转要素以同一转速旋转。即,发动机3的动力全部从动力分配机构6输出。换言之,
不存在发动机3的动力的一部分通过第1马达4、第2马达5变换为电能的情况。因此,没有以在变换为电能时产生的焦耳损耗等为要因的损失,所以动力的传递效率良好。
64.进而,如图8和图9所示,在ev
‑
lo模式和ev
‑
hi模式下,使制动机构b1接合并且从各马达4、5输出驱动转矩来进行行驶。具体而言,如图8所示,在ev
‑
lo模式下,使制动机构b1和第1离合机构cl1接合,并且从各马达4、5输出驱动转矩来进行行驶。即,通过制动机构b1,施加用于限制输出轴13或行星架12的旋转的反力转矩。该情况下的第1马达4的旋转方向成为正方向,并且输出转矩的方向成为使其转速增大的方向。另外,如图9所示,在ev
‑
hi模式下,使制动机构b1和第2离合机构cl2接合,并且从各马达4、5输出驱动转矩来进行行驶。即,通过制动机构b1,施加用于限制输出轴13或行星架12的旋转的反力转矩。该情况下的第1马达4的旋转方向成为与发动机3的旋转方向(正方向)相反的方向(负方向),并且输出转矩的方向成为使其转速增大的方向。
65.另外,与ev
‑
hi模式相比,ev
‑
lo模式下的变速部8的齿圈16的转速与第1马达4的转速的转速比大。即,在以同一车速进行行驶的情况下,设定ev
‑
lo模式的情况下的第1马达4的转速比设定ev
‑
hi模式的情况下的第1马达4的转速高。也就是说,与ev
‑
hi模式相比,ev
‑
lo模式下的减速比大。因此,通过设定ev
‑
lo模式能够获得大的驱动力。此外,上述的齿圈16的转速是输出构件(或输出侧)的转速,在图1的齿轮系中,为了方便,将从齿圈16到驱动轮的各构件的齿轮比设为1。并且,在单模式下,如图10所示,仅从第2马达5输出驱动转矩,并且使各离合机构cl1、cl2释放,由此动力分配机构6的各旋转要素成为停止了的状态。因此,能够减少因带着发动机3、第1马达4旋转引起的动力损失。
66.构成为基于主电池35a的充电剩余量(soc)、车速、要求驱动力等设定上述的各行驶模式。在本发明的实施方式中,构成为,根据主电池35a的充电剩余量来选择以维持主电池35a的充电剩余量的方式设定各行驶模式的cs(charge sustain:电量维持)模式、和积极地使用充入蓄电装置的电力的cd(charge depleting:耗电)模式。具体而言,构成为,在主电池35a的充电剩余量降低了的情况下等选择cs模式,在主电池35a的充电剩余量较多的情况下等选择cd模式。
67.在图11中示出在选择了cs模式时用于确定各行驶模式的映射的一例。该映射的横轴表示车速,纵轴表示要求驱动力。此外,车速可以根据由车速传感器检测出的数据来求出,要求驱动力可以根据由加速器开度传感器检测出的数据来求出。
68.在图11所示的例子中,构成为,在前进行驶且要求驱动力较小的情况下(包括减速要求),设定单模式。设定该单模式的区域基于第2马达5的特性来确定。此外,对设定单模式的区域添加了阴影线。
69.另外,在前进行驶并且要求驱动力较大的情况下,设定hv行驶模式。此外,在hv行驶模式下能够从低车速区域跨及高车速区域地输出驱动力,所以在主电池35a的充电剩余量处于下限值附近的情况下等,即使在应该设定单模式的区域,有时也会设定hv行驶模式。
70.进而,构成为,在设定hv行驶模式的情况下,根据车速和要求驱动力来选择hv
‑
lo模式、hv
‑
hi模式、或直接连结模式中的任一模式。具体而言,构成为,在车速较低、要求驱动力较大的情况下,选择hv
‑
lo模式,在车速较高且要求驱动力较小的情况下,选择hv
‑
hi模式,在车辆ve的运转状态为设定hv
‑
lo模式和hv
‑
hi模式的区域之间的运转点(基于车速和要求驱动力的值)的情况下,选择直接连结模式。
71.另外,构成为,上述的hv
‑
lo模式、直接连结模式、hv
‑
hi模式通过运转点横切图11所示的各线来进行切换。具体而言,构成为,在运转点从图11中的右侧朝向左侧横切、从下侧朝向上侧横切图11中的线“lo
←
fix”而发生了变化的情况下,从直接连结模式切换为hv
‑
lo模式,构成为,在运转点从左侧朝向右侧横切、从上侧朝向下侧横切线“lo
→
fix”而发生了变化的情况下,从hv
‑
lo模式切换为直接连结模式。同样地,构成为,在运转点从右侧朝向左侧横切、从下侧朝向上侧横切图11中的线“fix
←
hi”而发生了变化的情况下,从hv
‑
hi模式切换为直接连结模式,构成为,在运转点从左侧朝向右侧横切、从上侧朝向下侧横切线“fix
→
hi”而发生了变化的情况下,从直接连结模式切换为hv
‑
hi模式。
72.在图12中示出在选择了cd模式时用于确定各行驶模式的映射的一例。该映射的横轴表示车速,纵轴表示要求驱动力。此外,车速可以根据由车速传感器检测出的数据来求出,要求驱动力可以根据由加速器开度传感器检测出的数据来求出。
73.在图12所示的例子中,构成为,在前进行驶且要求驱动力比第1驱动力f1小的情况下(包括减速要求),设定单模式。设定该单模式的区域基于第2马达5的特性等来确定。此外,对设定单模式的区域添加了阴影线。
74.另外,在前进行驶并且要求驱动力比第1驱动力f1大的情况下,设定双模式。进而,在“车速比第1车速v1高”、“车速比第2车速v2高并且要求驱动力比第2驱动力f2大”的情况下,设定hv行驶模式。此外,在hv行驶模式下能够从低车速区域跨及高车速区域地输出驱动力,所以在主电池35a的充电剩余量处于下限值附近的情况下等,即使在应该设定单模式、双模式的区域,有时也会设定hv行驶模式。
75.进而,构成为,在设定hv行驶模式的情况下,根据车速和要求驱动力来选择hv
‑
lo模式、hv
‑
hi模式、或直接连结模式中的任一行驶模式。具体而言,构成为,在车速较低、要求驱动力较大的情况下,选择hv
‑
lo模式,在车速较高且要求驱动力较小的情况下,选择hv
‑
hi模式,在车辆ve的行驶状态为设定hv
‑
lo模式和hv
‑
hi模式的区域之间的运转点(基于车速和要求驱动力的值)的情况下,选择直接连结模式。
76.另外,构成为,上述的hv
‑
lo模式、直接连结模式、hv
‑
hi模式的各行驶模式通过运转点横切图12所示的各线而发生变化来进行切换。具体而言,构成为,在运转点横切图12中的线而发生了变化的情况下,直接连结模式与hv
‑
lo模式相互切换。同样地,构成为,在运转点横切图12中的线而发生了变化的情况下,hv
‑
hi模式与直接连结模式相互切换。
77.此外,也可以构成为,图11、图12所示的设定行驶模式的区域、用于进行设定hv行驶模式的条件下的模式切换的线根据构成驱动装置2的各构件的温度、主电池35a或电力控制装置33、34的温度、或主电池35a的充电剩余量等发生变动。
78.这样构成的车辆ve能够像上述那样通过切换离合机构等接合机构的接合状态来设定多个行驶模式。这些行驶模式的设定根据基于驾驶员的加速器操作的加速器开度、要求驱动力来设定。因此,例如,在以上述的仅利用第2马达5的驱动转矩进行行驶的单模式进行行驶的过程中,由于加速器操作等而要求驱动力增大了的情况下,转变为双模式或hv模式,另外,在转变为上述的行驶模式的情况下,使第1离合机构cl1或第2离合机构cl2接合。具体而言,将要接合的离合机构cl1(cl2)的驱动侧构件与从动侧构件以能够传递转矩的方式连结,在该情况下,将该驱动侧构件与从动侧构件的转速之差即转速差控制为能够使离
合机构cl1(cl2)接合的转速差。即,控制为能够容许接合时的冲击的转速(即同步转速)。
79.另外,在使离合机构cl1(cl2)从释放着的状态进行接合时,在上述的离合机构cl1(cl2)的转速差成为预定的转速差之后,通过致动器22使驱动侧构件与从动侧构件接近来进行接合。即,通过致动器22使驱动侧构件向从动侧构件侧移动,利用致动器22的推力使离合机构cl1(cl2)接合。另一方面,关于致动器22的推力,在致动器22的温度比预先设定的预定温度高的情况下,有时该推力会降低。此外,预定温度是在将上述的离合机构cl1(cl2)的转速差设定为了预定的转速差的情况下,能够产生进行接合控制时的推力的温度,该温度例如以油(atf)的温度为基准。由于致动器22组装于驱动装置2,所以能够通过检测油的温度间接地检测致动器22的温度。另外,除了油的温度以外,也可以以各马达4、5的温度、致动器22本身的温度为基准。另外,同样地,在辅机电池35b的电压(工作电压)降低的情况下致动器22的推力也降低。另外,在致动器22的移动速度(行程)降低的情况下推力也降低。即,在表示致动器22的动作状态的至少任一个参数的值偏离预定值的情况下,该致动器22的推力降低。因此,在像这样致动器22的温度、工作电压偏离预定值(或预定范围)的情况下,有时无法产生预定的推力。也就是说,有可能无法产生能够在将离合机构cl1(cl2)的转速差控制为预定的转速差的情况下进行接合的致动器22的推力,离合机构cl1(cl2)的接合不会完成、或者其接合动作需要大量的时间,乃至无法切换行驶模式。因此,在本发明的实施方式中,构成为,即使在致动器22的推力降低了的情况下,也能够顺利地进行离合机构cl1(cl2)的接合。
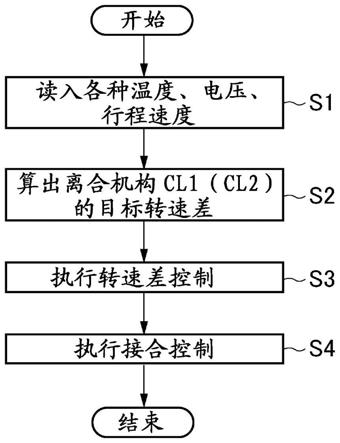
80.图13是示出该控制的一例的流程图,首先,读入油(atf)的温度(或各马达4、5的温度)、辅机电池35b的电压、以及致动器22的行程速度(步骤s1)。如上所述,上述油的温度、辅机电池的电压值、致动器22的行程速度等各参数影响致动器22的推力。即,在油的温度比预先设定的预定温度高的情况下,致动器22的推力降低。同样地,在辅机电池35b的电压值比预先设定的预定值低的情况下致动器22的推力降低。同样地,在致动器22的行程速度降低的情况下推力也降低。因此,读入上述的影响致动器22的推力的各参数。此外,上述各参数的值能够由在上述的图3中所说明的各种传感器来检测。
81.接着,根据上述各参数的值算出离合机构cl1(cl2)的目标的转速差(步骤s2)。如上所述,各参数的值对致动器22的推力产生影响。因此,若将使离合机构cl1(cl2)接合时的输入侧与输出侧的转速差设定为预先设定的转速差,则在上述的各参数的值偏离了预定值(设计值)的情况下,有时会以推力的降低为要因而发生离合机构cl1(cl2)的接合延迟、或者无法使该离合机构cl1(cl2)接合。因此,在该步骤s2中,算出即使在致动器22的推力降低了的情况下也能够可靠地完成离合机构cl1(cl2)的接合动作的目标转速差。
82.该转速差例如可以参照图14所示那样的映射来算出。纵轴表示目标转速差,横轴表示影响致动器22的推力的参数(即油温的倒数、电压、推力、行程速度)。根据该映射可知,随着横轴的油温的倒数、电压、推力、行程速度从通常值(设计值)降低,即随着油温变高、电压降低、推力降低、以及行程速度降低,目标转速差也变小。也就是说,表示致动器22的状态的各参数的值从通常值偏离的量越大,则目标转速差也越小。
83.在推力降低了的状态下,在通常的转速差时执行了接合动作的情况下,由于推力小,所以有时无法进行离合机构cl1(cl2)的接合。例如,在离合机构cl1(cl2)为牙嵌式离合器的情况下,有时会因牙嵌式齿彼此干涉等而无法顺利地进行接合动作。因此,例如在油的
温度比通常温度高的情况下,与通常时相比致动器22的推力降低,所以设定能够在该降低后的推力下进行离合机构cl1(cl2)的接合的比通常小的转速差。也就是说,该映射所示的目标转速差被设定为能够利用与各参数的值相应的推力使离合机构cl1(cl2)接合的转速差。
84.然后,在步骤s2中算出目标转速差之后,控制离合机构cl1(cl2)的转速差以使其成为所述目标转速差(步骤s3)。即,进行使离合机构cl1(cl2)的转速差同步的同步控制。具体而言,通过控制第1马达4来控制第1离合机构cl1、第2离合机构cl2中的转速差。在此,对通过第1马达4进行的各离合机构cl1、cl2的转速差的控制进行说明。在图1所示的驱动装置2的情况下,在车辆ve进行前进行驶的状态下,若通过第1马达4使太阳轮9旋转,则齿圈10和与之连结的太阳轮15以与第1马达4的转速相应的转速旋转,进而行星架18以与该太阳轮15和输出齿轮19(齿圈16)的转速相应的转速旋转。在该行星架18连结有作为第1离合机构cl1的从动侧构件的旋转构件12b、作为第2离合机构cl2的驱动侧构件的旋转构件18a,所以,结果,上述的旋转构件12b、18a成为与第1马达4的转速相应的转速。因此,能够通过第1马达4来控制第1离合机构cl1、第2离合机构cl2中的转速差。
85.然后,在步骤s3中将转速差控制为目标转速差之后,进行要接合的离合机构cl1(cl2)的接合控制(步骤s4)。即,使致动器22进行行程运动,使离合机构cl1(cl2)的旋转构件彼此接近而进行接合。也就是说,在该状态下,由于转速差成为基于在步骤s1中所读入的各参数的值算出的转速差,所以可进行顺畅的接合动作。
86.接着,参照时间图对执行了图13的控制例的情况下的转速差等的变化进行说明。图15是示出该时间图的图,分别示出了行驶模式的切换要求、离合机构cl1(cl2)的接合要求、离合机构cl1(cl2)的转速差、以及致动器22的活塞的行程的变化。另外,该图15所示的时间图示出了例如从以单模式进行行驶的状态向使第1离合机构cl1或第2离合机构cl2接合的任一行驶模式转变的情况下的例子。另外,在该图15所示的例子中,处于上述的油的温度等各种参数中的至少任一个参数的值偏离预定值而致动器22的推力降低了的状态,因此,目标转速差也被设定得比通常时小。以下,具体地进行说明。
87.首先,加速器开度、要求驱动力增大,从而要求模式切换(t1时间点)。即,要求从单模式向使第1离合机构cl1或第2离合机构cl2接合的行驶模式的切换。因此,在该t1时间点,将要接合的离合机构cl1(cl2)的转速差朝向目标转速差进行控制(t1时间点~t2时间点)。也就是说,通过第1马达4减小该转速差。此外,在该t1时间点下,应该接合的离合机构cl1(cl2)的转速差没有达到目标转速差,所以离合机构cl1(cl2)的接合要求被设为非激活(off),致动器22的行程被设为停止(off)。
88.接着,由第1马达4控制的离合机构cl1(cl2)的转速差达到目标转速差(t2时间点)。也就是说,达到离合机构cl1(cl2)能够同步的转速。此外,能够同步的转速是指,在降低离合机构cl1(cl2)的输入侧与输出侧的转速差而进行接合的情况下,能够进行离合机构的接合并且能够容许接合时的冲击的转速差。因此,在该t2时间点,接合要求成为激活(on)。
89.然后,在接合要求成为激活(on)后,为了使要接合的离合机构cl1(cl2)接合而控制致动器22(t3时间点~t4时间点)。使致动器22进行行程运动而使驱动侧构件接近从动侧构件。也就是说,以使得旋转构件12a与旋转构件12b接近(或者使旋转构件18a与旋转构件
18b接近)的方式按压致动器22。此外,致动器22的行程的变化速度(移动速度)与对上述的推力产生影响的各种参数的值相对应。因此,在比图15所示的变化速度大的情况下,其变化率(斜率)变大,在比图15所示的变化速度小的情况下,其变化率变小。
90.然后,在t4时间点,要接合的离合机构cl1(cl2)的输入侧与输出侧完全接合,该离合机构cl1(cl2)的接合完成。即,离合机构cl1(cl2)的转速差成为“0”。同时,行驶模式的切换完成。
91.像这样,在本发明的实施方式中,构成为,在影响致动器22的推力的油的温度等各种参数的值偏离预定值(设计值)的情况下,对接合时的离合机构cl1(cl2)的转速差进行修正。即,在影响致动器22的推力的各种参数的值偏离预定值的情况下,该推力有时会降低。在这样的情况下,有时无法使离合机构cl1(cl2)接合、或者会发生大幅度的接合延迟。例如,在离合机构cl1(cl2)是牙嵌式离合器的情况下,离合机构cl1(cl2)的输入侧与输出侧的牙嵌式齿有时会彼此干涉而无法接合。因此,构成为,将在各种参数的值处于预定值的范围的情况下确定的离合机构cl1(cl2)的目标转速差控制为与当前的参数的值相应的目标转速差。
92.也就是说,当要求向使离合机构cl1(cl2)接合的行驶模式的切换时,将离合机构cl1(cl2)的转速差控制为与当前的各种参数的值相应的目标转速差。然后,在将离合机构cl1(cl2)的转速差控制为该目标转速差之后,进行接合指示和接合控制。即,控制致动器22,使离合机构cl1(cl2)的输入侧的构件与输出侧的构件接近而进行接合。在该情况下,即使在致动器22的推力降低的情况下,由于离合机构cl1(cl2)的转速差与该降低后的推力相对应,所以也能够可靠地进行离合机构cl1(cl2)的接合。因此,在本发明的实施方式中,即使在致动器22的推力降低了的情况下,也能够避免或抑制无法进行离合机构cl1(cl2)的接合、或者接合动作需要大量的时间等不良情况的发生。另外,能够像这样可靠地进行离合机构cl1(cl2)的接合动作,由此能够顺利地进行行驶模式的切换。
93.另外,在本发明的实施方式中,构成为从通常值(设计值)对目标转速差进行修正,进行离合机构cl1(cl2)的接合,所以不需要例如为了以通常值的转速差进行接合控制而另行设置推力大的致动器。因此,能够避免受到搭载性、成本方面的制约。
94.另外,在本发明的实施方式中,构成为,基于油的温度、各马达4、5的温度、辅机电池35b的电压等现有的检测数据算出致动器22的推力,并算出离合机构cl1(cl2)的目标转速差。也就是说,可以不设置检测致动器22的推力的传感器等新设备,能够通过现有的构成来执行上述的控制。
95.以上,对本发明的实施方式进行了说明,但本发明不限定于上述的例子,也可以在达成本发明的目的的范围内适当地进行变更。在上述的实施方式中,构成为通过现有的参数间接地检测致动器22的推力,但也可以另行设置直接检测该推力的传感器等。在该情况下,能够检测出更准确的推力,并且能够基于该推力来执行上述的控制。
96.另外,上述的控制可以基于各参数的值中的至少任一个参数的值来执行,或者也可以基于多个参数的值来执行。在基于多个参数来执行控制的情况下,通过参照与图14同样的映射等方式来执行控制。通过基于更多参数来进行控制,能够进行更准确的控制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。