1.本发明涉及移动体检测系统。
背景技术:
2.已知一种通过从行人所持有的便携电话终端发出警报,向行人通知车辆正在接近这一情况的行人检测系统。作为这样的行人检测系统中的1个,已知一种从车辆发送无线信号,在便携电话终端接收到该无线信号时基于该无线信号判定是否应向行人通知车辆正在接近的行人检测系统(例如,参照日本特开2006-331154)。
技术实现要素:
3.在行人正在车辆的驾驶员的死角区域行走的情况下,驾驶员无法视认该行人。因此,为了将该行人的信息高精度地向驾驶员提供,期待一种能够高精度地追踪行人的移动速度、移动方向等的行人的举动的系统。这也适用于其他车辆正在本车辆的驾驶员的死角区域行驶的情况。
4.一般来讲,若车辆与便携电话终端之间的通信周期短,则能够高精度地追踪行人、其他车辆等的移动体的举动。然而,另一方面,存在车辆和/或便携电话终端的电池的耗电量变大这一问题。若延长通信周期,则能够抑制电池的耗电量,但是产生无法高精度地追踪移动体的举动这一问题。
5.本发明是为了应对上述课题而做出的。即,本发明的目的之一在于,提供一种在抑制耗电量的同时,能够高精度地追踪存在于本车辆的驾驶员的死角区域的行人以及其他车辆等的移动体的举动的移动体检测系统。
6.本发明的移动体检测系统是检测存在于本车辆的驾驶员的死角区域的移动体的系统。
7.本发明的移动体检测系统包含:第1终端控制装置,搭载于人能够携带的第1终端且向外部发发送号;接收装置,接收所述第1终端控制装置发送的信号;以及主控制装置,判定在所述死角区域是否存在所述移动体。
8.所述主控制装置,执行用于取得所述接收装置从所述第1终端控制装置接收到的所述信号来作为第1终端信号的第1终端信号取得处理,在通过该第1终端信号取得处理取得了所述第1终端信号的情况下,基于所取得的所述第1终端信号判定在所述死角区域存在所述移动体这一死角条件是否成立。
9.另外,所述主控制装置,在判定为所述死角条件不成立的情况下,以第1周期执行所述第1终端信号取得处理,在判定为所述死角条件成立的情况下,以比所述第1周期短的第2周期执行所述第1终端信号取得处理。
10.根据本发明的移动体检测系统,主控制装置与第1终端控制装置之间的通信周期(即,执行第1终端信号取得处理的周期),在死角条件不成立时,被设定为长周期(即,第1周期),在死角条件成立时,被设定为短周期(即,第2周期)。因此,在抑制本车辆的电池和/或
第1终端的电池的耗电量的同时,能够高精度地追踪存在于死角区域的移动体的举动。
11.在本发明的移动体检测系统中,所述接收装置例如搭载于所述本车辆。由此,能够将本车辆的接收装置作为移动体检测系统的接收装置加以利用。
12.另外,所述主控制装置例如搭载于所述本车辆。由此,能够将本车辆的控制装置作为移动体检测系统的主控制装置加以利用。
13.另外,所述移动体检测系统还可以包含在所述驾驶员能够视认的位置显示图像的显示装置。该情况下,所述显示装置例如搭载于所述本车辆。而且,所述主控制装置也可以构成为,在判定为所述死角条件成立的情况下,使表示存在于所述死角区域的所述移动体的图像显示于所述显示装置。由此,能够向本车辆的驾驶员通知在死角区域存在移动体这一情况。
14.另外,所述第1终端例如是,便携电话终端或人能够带在身上的终端。由此,能够将人能够轻松携带的终端作为第1终端加以利用。
15.另外,所述移动体检测系统还可以包含搭载于人能够携带的第2终端的第2终端控制装置。该情况下,所述接收装置例如搭载于所述第2终端。而且,所述主控制装置也可以构成为,在判定为所述第2终端存在于所述本车辆内的情况下,经由所述接收装置取得所述第1终端信号。由此,能够将第2终端的接收装置作为移动体检测系统的接收装置加以利用。
16.另外,所述移动体检测系统还可以包含搭载于人能够携带的第2终端的第2终端控制装置。该情况下,所述主控制装置例如是所述第2终端控制装置。而且,所述主控制装置也可以构成为,在判定为所述第2终端存在于所述本车辆内且取得了所述第1终端信号的情况下,基于所述第1终端信号来判定所述死角条件是否成立。由此,能够将第2终端的控制装置作为移动体检测系统的主控制装置加以利用。
17.另外,所述移动体检测系统还可以包含,在所述驾驶员能够视认的位置显示图像的显示装置、和搭载于人能够携带的第2终端的第2终端控制装置。该情况下,所述显示装置例如搭载于所述第2终端。而且,所述主控制装置也可以构成为,在判定为所述第2终端存在于所述本车辆内且取得了所述第1终端信号的情况下,基于所述第1终端信号判定所述死角条件是否成立,在判定为所述死角条件成立的情况下,使表示存在于所述死角区域的所述移动体的图像显示于所述显示装置。由此,能够利用第2终端的显示装置向本车辆的驾驶员通知在死角区域存在移动体这一情况。
18.另外,所述第2终端例如是,便携电话终端或人能够带在身上的终端。由此,能够将人能够轻松携带的终端作为第2终端加以利用。
19.另外,所述主控制装置也可以构成为,在所述死角条件成立的情况下,将在所述死角区域存在所述移动体这一情况向所述驾驶员通知。由此,本车辆的驾驶员能够知道在死角区域存在移动体这一情况。
20.另外,所述移动体检测系统还可以包含检测所述本车辆的行进方向前方的状况的检测装置。该情况下,所述检测装置搭载于所述本车辆。而且,所述主控制装置也可以构成为,取得与所述检测装置检测出的状况相关的信息来作为前方状况检测信息,基于所取得的所述前方状况检测信息确定所述死角区域。由此,主控制装置能够利用本车辆的检测装置确定死角区域。
21.另外,所述移动体检测系统还可以包含检测所述本车辆的行进方向前方的状况的
检测装置。该情况下,所述检测装置例如设置于道路。而且,所述主控制装置也可以构成为,取得与所述检测装置检测出的状况相关的信息来作为前方状况检测信息,基于所取得的所述前方状况检测信息确定所述死角区域。由此,主控制装置能够利用设置于道路的检测装置确定死角区域。
22.另外,所述移动体检测系统还可以包含检测所述本车辆的行进方向前方的状况的检测装置。该情况下,所述检测装置例如搭载于所述本车辆。而且,所述主控制装置也可以构成为,取得与所述检测装置检测出的状况相关的信息来作为前方状况检测信息,在基于所述前方状况检测信息判定为在所述本车辆的行进方向前方不存在所述移动体且基于所述第1终端信号判定为所述第1终端存在于所述本车辆的行进方向前方的情况下,判定为所述死角条件成立。由此,主控制装置能够利用本车辆的检测装置判定死角条件是否成立。
23.另外,所述移动体检测系统还可以包含检测所述本车辆的行进方向前方的状况的检测装置。所述检测装置例如设置于道路。而且,所述主控制装置也可以构成为,取得与所述检测装置检测出的状况相关的信息来作为前方状况检测信息,在基于所述前方状况检测信息判定为在所述本车辆的行进方向前方不存在所述移动体且基于所述第1终端信号判定为所述第1终端存在于所述本车辆的行进方向前方的情况下,判定为所述死角条件成立。由此,主控制装置能够利用设置于道路的检测装置判定死角条件是否成立。
24.另外,所述主控制装置也可以构成为,基于所述本车辆的当前位置和所述本车辆周边的地图信息确定所述死角区域。由此,能够更加准确地确定死角区域。
25.本发明的构成要素并不限定于参照附图并稍后说明的本发明的实施方式。根据本发明的实施方式的说明应该容易理解本发明的其他的目的、其他的特征以及附带的优点。
附图说明
26.以下,将参照附图说明本发明的示例性实施例的特征、优点以及技术上和工业上的意义,其中同一附图标记表示同一要素,并且其中:
27.图1是表示本发明的第1实施方式的移动体检测系统的图。
28.图2是表示第1实施方式的另一个移动体检测系统的图。
29.图3是为了说明第1实施方式的移动体检测系统的工作而使用的图。
30.图4是表示第1实施方式的车辆显示装置的一例的图。
31.图5是表示第1实施方式的车辆控制装置执行的例程(routine)的流程图。
32.图6是表示第1实施方式的第1终端控制装置执行的例程的流程图。
33.图7是表示第1实施方式的变形例的移动体检测系统的图。
34.图8是表示第1实施方式的变形例的车辆控制装置执行的例程的流程图。
35.图9是表示第1实施方式的变形例的第2终端控制装置执行的例程的流程图。
36.图10是表示本发明的第2实施方式的移动体检测系统的图。
37.图11是表示第2实施方式的第2终端控制装置执行的例程的流程图。
38.图12是表示第2实施方式的第1终端控制装置执行的例程的流程图。
39.图13是表示第2实施方式的车辆控制装置执行的例程的流程图。
具体实施方式
40.以下,参照附图,说明本发明的实施方式的移动体检测系统。
41.<第1实施方式>
42.如图1所示,本发明的第1实施方式的移动体检测系统10包含车辆控制系统11v以及第1终端控制系统11a。
43.<车辆控制系统>
44.车辆控制系统11v包含:车辆控制装置12v、车辆发送(信号)装置13v、车辆接收(信号)装置14v、车辆显示装置15v、车辆扬声器16v、车辆检测装置17v以及gps装置18v。
45.<车辆控制装置>
46.车辆控制装置12v搭载于本车辆10v。车辆控制装置12v包含电子控制装置(即ecu)19v。车辆控制装置12v的ecu19v具备:cpu、rom、ram以及接口。车辆控制装置12v构成为能够判定在本车辆10v的驾驶员的死角区域bld是否存在行人以及其他车辆等移动体mb。在第1实施方式中,车辆控制装置12v作为主控制装置发挥功能。以下,将本车辆10v的驾驶员称为“驾驶员10d”。
47.<车辆发送(信号)装置>
48.车辆发送装置13v搭载于本车辆10v。车辆发送装置13v与车辆控制装置12v电连接。车辆控制装置12v能够经由车辆发送装置13v将信号以无线方式向外部发送。以下,将车辆控制装置12v以无线方式向外部发送的信号称为“车辆信号sv”。另外,将以无线方式被向外部发送的信号或以无线方式被发送到外部的信号称为“无线信号”。
49.<车辆接收(信号)装置>
50.车辆接收装置14v搭载于本车辆10v。车辆接收装置14v与车辆控制装置12v电连接。车辆控制装置12v能够经由车辆接收装置14v取得无线信号。
51.此外,车辆发送装置13v和车辆接收装置14v也可以是具备接收无线信号的功能和发送无线信号的功能的1个收发装置。
52.<车辆显示装置>
53.车辆显示装置15v搭载于本车辆10v。更具体而言,车辆显示装置15v搭载于本车辆10v的驾驶员10d能够视认的位置。车辆显示装置15v例如是所谓的导航装置的显示器或所谓的抬头显示器(head up display)。车辆显示装置15v与车辆控制装置12v电连接。车辆控制装置12v能够将各种图像显示于车辆显示装置15v。
54.<车辆扬声器>
55.车辆扬声器16v搭载于本车辆10v。车辆扬声器16v与车辆控制装置12v电连接。车辆控制装置12v能够使车辆扬声器16v发出各种声音。车辆扬声器16v以发出的声音能够被驾驶员10d听到的方式搭载于本车辆10v。
56.<车辆检测装置>
57.车辆检测装置17v搭载于本车辆10v。车辆检测装置17v对本车辆10v的行进方向前方的状况进行检测。行进方向前方的状况包含:本车辆10v正在前进时的本车辆10v的前后方向上的前方的状况、和本车辆10v正在后退时的本车辆10v的前后方向上的后方的状况。另外,行进方向前方的状况是相对于本车辆10v的前后方向具有一定的宽度或角度的范围的状况。
58.车辆检测装置17v例如是,摄像头装置、雷达传感器装置以及光传感器装置中的至少1个。摄像头装置是具备ccd摄像头等摄像头的装置。雷达传感器装置是具备毫米波雷达传感器等雷达传感器的装置。光传感器装置是具备光传感器的装置,例如是采用了激光雷达(lidar:light detection and ranging:光探测和测距)方式等的装置。
59.车辆检测装置17v与车辆控制装置12v电连接。车辆检测装置17v将表示前方状况检测信息的信号向车辆控制装置12v发送。前方状况检测信息是车辆检测装置17v检测出的与本车辆10v的行进方向前方的状况相关的信息。车辆控制装置12v根据该信号取得前方状况检测信息。
60.例如,在车辆检测装置17v是摄像头装置的情况下,摄像头装置将拍摄本车辆10v的行进方向前方的状况而得到的图像的数据向车辆控制装置12v发送。车辆控制装置12v从该数据取得与本车辆10v的行进方向前方的状况相关的信息来作为前方状况检测信息。
61.另外,在车辆检测装置17v是雷达传感器装置的情况下,雷达传感器装置向本车辆10v的行进方向发送电波,在由人、设备以及建筑物等立体物反射的电波到达了雷达传感器装置的情况下,接收该电波。雷达传感器装置基于与所发送的电波以及接收到的电波相关的数据将立体物与本车辆10v的距离以及立体物相对于本车辆10v存在的方向等相关信息向车辆控制装置12v发送。车辆控制装置12v从该信息取得立体物与本车辆10v的距离以及立体物相对于本车辆10v存在的方向等相关信息来作为前方状况检测信息。
62.此外,雷达传感器装置也可以构成为,将与所发送的电波以及接收到的电波相关的数据本身向车辆控制装置12v发送。该情况下,车辆控制装置12v从该数据取得立体物与本车辆10v的距离以及立体物相对于本车辆10v存在的方向等相关信息来作为前方状况检测信息。
63.另外,在车辆检测装置17v是光传感器装置的情况下,光传感器装置向本车辆10v的行进方向发送激光,在由人、设备以及建筑物等立体物反射的激光到达了光传感器装置的情况下,接收该激光。光传感器装置基于与所发送的激光以及接收到的激光相关的数据将立体物与本车辆10v的距离以及立体物相对于本车辆10v存在的方向等相关信息向车辆控制装置12v发送。车辆控制装置12v从该信息取得立体物与本车辆10v的距离以及立体物相对于本车辆10v存在的方向等相关信息来作为前方状况检测信息。
64.此外,光传感器装置也可以构成为,将与所发送的激光以及接收到的激光相关的数据本身向车辆控制装置12v发送。该情况下,车辆控制装置12v从该数据取得立体物与本车辆10v的距离以及立体物相对于本车辆10v存在的方向等相关信息来作为前方状况检测信息。
65.此外,如图2所示,移动体检测系统10也可以取代车辆检测装置17v或除车辆检测装置17v之外还包含设置于道路(特别是道路旁边的地方和/或道路上方的地方)的道路检测装置17r。在本例中,道路检测装置17r为了取得本车辆10v的行进方向前方的状况而被利用。道路检测装置17r例如是监视摄像头装置。监视摄像头装置是具备ccd摄像头等摄像头的装置。道路检测装置17r构成为能够发送无线信号。
66.道路检测装置17r如图2所示,将所检测出的与本车辆10v的行进方向前方的状况相关的信息以无线信号的方式发送。车辆控制装置12v经由车辆接收装置14v取得该无线信号。车辆控制装置12v从该无线信号取得与本车辆10v的行进方向前方的状况相关的信息来
作为前方状况检测信息。
67.例如,在道路检测装置17r是监视摄像头装置的情况下,监视摄像头装置将对设置有该监视摄像头装置的场所周边的状况进行拍摄而得到的图像的数据以无线信号的方式发送。车辆控制装置12v经由车辆接收装置14v取得该无线信号。车辆控制装置12v从该无线信号之中提取本车辆10v的行进方向前方的状况的图像的数据。车辆控制装置12v从所提取出的数据取得与本车辆10v的行进方向前方的状况相关的信息来作为前方状况检测信息。
68.此外,移动体检测系统10中,作为道路检测装置17r与车辆接收装置14v之间的通信方式,虽然采用了以无线方式直接通信的直接通信方式,但也可以采用云通信方式。
69.<gps装置>
70.gps装置18v搭载于本车辆10v。gps装置18v与车辆控制装置12v电连接。gps装置18v接收所谓的gps信号。gps装置18v将所接收到的gps信号向车辆控制装置12v发送。车辆控制装置12v能够从自gps装置18v发送的gps信号取得本车辆10v的当前位置。
71.<地图信息>
72.车辆控制装置12v还存储有地图信息。此外,车辆控制装置12v也可以构成为,能够从网站(web)上的服务器取得地图信息。
73.<第1终端控制系统>
74.第1终端控制系统11a包含:第1终端控制装置12a、第1终端发送装置13a、第1终端接收装置14a、第1终端显示装置15a以及第1终端扬声器16a。
75.<第1终端控制装置>
76.第1终端控制装置12a搭载于第1终端10a。第1终端10a是人能够携带的终端,例如是便携电话终端或人能够带在身上的终端。在第1实施方式中,第1终端10a为存在于本车辆10v之外的行人或其他车辆的驾驶员或乘员等移动体所持有。
77.第1终端控制装置12a包含电子控制装置(即ecu)19a。第1终端10a的ecu19a具备:cpu、rom、ram以及接口。
78.<第1终端发送装置>
79.第1终端发送装置13a搭载于第1终端10a。第1终端发送装置13a与第1终端控制装置12a电连接。第1终端控制装置12a能够经由第1终端发送装置13a发送无线信号。以下,将第1终端控制装置12a发送的无线信号称为“第1终端信号sa”。
80.<第1终端接收装置>
81.第1终端接收装置14a搭载于本车辆10v。第1终端接收装置14a与第1终端控制装置12a电连接。第1终端控制装置12a能够经由第1终端接收装置14a取得无线信号。
82.此外,第1终端发送装置13a和第1终端接收装置14a也可以是具备接收无线信号的功能和发送无线信号的功能的1个收发装置。
83.<第1终端显示装置>
84.第1终端显示装置15a搭载于第1终端10a。第1终端显示装置15a与第1终端控制装置12a电连接。第1终端控制装置12a能够将各种图像显示于第1终端显示装置15a。第1终端显示装置15a例如是第1终端10a的显示器。
85.<第1终端扬声器>
86.第1终端扬声器16a搭载于第1终端10a。第1终端扬声器16a与第1终端控制装置12a
电连接。第1终端控制装置12a能够使得从第1终端扬声器16a发出各种声音。
87.此外,移动体检测系统10中,作为第1终端发送装置13a与车辆接收装置14v之间的通信方式,以及车辆发送装置13v与第1终端接收装置14a之间的通信方式,采用了以无线方式直接通信的直接通信方式,但是也可以采用云通信方式。
88.另外,在本例中,第1终端控制装置12a构成为,即使专用的应用程序(application)没有在该第1终端控制装置12a中工作,也执行信号发送处理以及信号取得处理等与第1终端控制装置12a的工作相关的处理。然而,第1终端控制装置12a也可以构成为,仅在专用的移动体检测应用程序在该第1终端控制装置12a工作时,才执行这些处理。此外,移动体检测应用程序是预先安装于第1终端控制装置12a的应用程序,并且是为了将第1终端10a作为移动体检测系统10的一部分加以利用而由第1终端10a的持有人启动的应用程序。
89.<移动体检测系统的工作>
90.接着,对移动体检测系统10的工作进行说明。
91.车辆控制装置12v在后述的死角条件cbld不成立的期间,以第1周期执行用于取得无线信号的信号取得处理。
92.另外,第1终端控制装置12a在没有取得后述的死角条件成立信号sbld期间,以第1周期执行用于发送无线信号(即,第1终端信号sa)的信号发送处理,并且以第1周期执行用于取得无线信号的信号取得处理。
93.以下,将执行信号取得处理的第1周期称为“第1取得周期cy1_r”,将执行信号发送处理的第1周期称为“第1发送周期cy1_t”。另外,将执行信号取得处理的周期称为“信号取得周期”,将执行信号发送处理的周期称为“信号发送周期”。
94.然而,第1终端信号sa能够到达的范围有限。因此,在第1终端10a存在于距本车辆10v遥远的场所,第1终端信号sa无法到达车辆接收装置14v的情况下,车辆控制装置12v即使执行信号取得处理也无法取得第1终端信号sa。另一方面,在第1终端10a存在于接近本车辆10v的场所,第1终端信号sa能够到达车辆接收装置14v的情况下,车辆控制装置12v能够通过信号取得处理取得第1终端信号sa。
95.车辆控制装置12v在取得第1终端信号sa时,确定死角区域bld。死角区域bld是本车辆10v的行进方向前方的区域,并且是驾驶员10d无法视认的区域。关于死角区域bld的确定的方法稍后说明。
96.第1终端信号sa至少表示“表示该信号是从第1终端控制装置12a发送的信号这一情况的识别信息”以及“第1终端10a的位置信息”。车辆控制装置12v能够从第1终端信号sa取得第1终端10a的位置信息。以下,将第1终端10a的位置信息称为“第1终端位置信息”。
97.车辆控制装置12v在基于第1终端位置信息以及死角区域bld判定为在死角区域bld存在第1终端10a的情况下,判定为死角条件cbld成立。即,车辆控制装置12v判定为在死角区域bld存在移动体mb。
98.例如,如图3所示,在行人w1持有第1终端10a的情况下,驾驶员10d能够视认该行人w1。该情况下,车辆控制装置12v判定为死角条件cbld不成立。此外,在图3所示的例子中,行人w1正在人行道p1上沿方向d1步行,本车辆10v正在道路rv上沿方向dv行驶。
99.另一方面,在行人w2持有第1终端10a的情况下,由于相对于驾驶员10d行人w2存在
于建筑物blg的另一侧,所以驾驶员10d无法视认该行人w2。该情况下,车辆控制装置12v判定为死角条件cbld成立。此外,在图3所示的例子中,行人w2正在人行道p2上沿方向d2步行。
100.车辆控制装置12v在判定为死角条件cbld成立时,将信号取得周期从第1取得周期cy1_r向第2周期变更。以下,将执行信号取得处理的第2周期称为“第2取得周期cy2_r”。第2取得周期cy2_r是比第1取得周期cy1_r短的周期。
101.因此,车辆控制装置12v在判定为死角条件cbld成立之后,在直到判定为死角条件cbld不成立为止的期间,以第2取得周期cy2_r执行信号取得处理。
102.进而,车辆控制装置12v在判定为死角条件cbld成立时,开始信号发送处理。之后,车辆控制装置12v直到判定为死角条件cbld不成立为止,以第2周期执行信号发送处理。以下,将执行信号发送处理的第2周期称为“第2发送周期cy2_t”。第2发送周期cy2_t被设定为是比第1发送周期cy1_t短的周期。另外,在本例中,第2发送周期cy2_t被设定为是与第2取得周期cy2_r相同长度的周期。
103.此外,车辆控制装置12v在判定为死角条件cbld不成立之后也需要执行信号发送处理的情况下,以第1发送周期cy1_t执行信号发送处理。
104.车辆控制装置12v通过信号发送处理发送死角条件成立信号sbld。死角条件成立信号sbld是表示死角条件cbld成立这一情况的车辆信号sv。
105.第1终端控制装置12a在取得死角条件成立信号sbld时,将信号发送周期从第1发送周期cy1_t向第2发送周期cy2_t变更,并且将信号取得周期从第1取得周期cy1_r向第2取得周期cy2_r变更。
106.因此,第1终端控制装置12a在取得了死角条件成立信号sbld之后,直到不再取得死角条件成立信号sbld为止的期间,以第2发送周期cy2_t执行信号发送处理,并且以第2取得周期cy2_r执行信号取得处理。
107.进而,车辆控制装置12v在判定为死角条件cbld成立时,判定第1通知条件c1是否成立。车辆控制装置12v也可以构成为,在判定为死角条件cbld成立时判定为第1通知条件c1也成立,但在本例中,在接触可能性运算值vc成为预定的第1运算值vc_1以上时判定为第1通知条件c1成立。
108.<接触可能性运算值>
109.车辆控制装置12v如以下那样计算接触可能性运算值vc。车辆控制装置12v通过以时序方式分析从第1终端信号sa表示的第1终端位置信息取得的第1终端10a的位置,取得第1终端举动参数。第1终端举动参数是表示第1终端10a的移动速度以及移动方向等的第1终端10a的举动的参数。除此之外,车辆控制装置12v取得本车辆举动参数。本车辆举动参数是从本车辆10v的行驶速度、操舵角度以及前方状况检测信息等取得的表示本车辆10v的移动速度以及移动方向等的本车辆10v的举动的参数。
110.车辆控制装置12v能够基于这些举动参数知晓本车辆10v与第1终端10a的持有人接触的可能性。车辆控制装置12v基于这些举动参数计算表示本车辆10v与第1终端10a的持有人接触的可能性的值来作为接触可能性运算值vc。在本例中,本车辆10v与第1终端10a的持有人接触的可能性越高,则接触可能性运算值vc越大。
111.车辆控制装置12v在判定为第1通知条件c1成立时,将在死角区域bld存在移动体mb这一情况向驾驶员10d通知。更具体而言,车辆控制装置12v在判定为第1通知条件c1成立
时,通过执行车辆显示处理,将在死角区域bld存在移动体mb这一情况向驾驶员10d通知。车辆显示处理是将通知图像显示于车辆显示装置15v的处理。另外,显示于车辆显示装置15v的通知图像是表示在死角区域bld存在的移动体mb的图像。
112.例如,在车辆显示装置15v是导航装置的显示器的情况下,车辆控制装置12v如图4所示,通过车辆显示处理,在导航装置的显示器的第1终端10a的位置所对应的位置显示行人的图像img2。此外,在图4所示的例子中,行人的图像img2以外的图像是通过摄像头装置拍摄到的图像,图像img1是图3所示的行人w1的图像,图像img3是图3所示的建筑物blg的图像。
113.由此,本车辆10v的驾驶员10d能够知晓在死角区域bld存在移动体mb这一情况。
114.此外,在本例中,车辆控制装置12v在判定为第1通知条件c1成立的情况下,视为第1终端10a为行人所持有,将行人的图像显示于车辆显示装置15v。然而,也可以构成为,在第1终端控制装置12a能够发送表示第1终端10a存在于与本车辆10v不同的车辆内这一情况的第1终端信号sa的情况下,车辆控制装置12v取得了该第1终端信号sa的情况下,车辆控制装置12v判定为第1通知条件c1成立的情况下,判定为第1终端10a为乘坐着车辆的人所持有,在与第1终端10a的位置对应的车辆显示装置15v的位置显示车辆的图像。
115.进而,车辆控制装置12v在判定为第1通知条件c1成立时,发送第1终端显示指令信号sdis_a。第1终端显示指令信号sdis_a是表示第1终端显示指令的车辆信号sv。
116.第1终端控制装置12a在取得第1终端显示指令信号sdis_a时,将在死角区域bld存在车辆(即,本车辆10v)这一情况向第1终端10a的持有人通知。更具体而言,第1终端控制装置12a在取得第1终端显示指令信号sdis_a时,通过执行第1终端显示处理,将在死角区域bld存在车辆这一情况向第1终端10a的持有人通知。第1终端显示处理是将通知图像显示于第1终端显示装置15a的处理。另外,显示于第1终端显示装置15a的通知图像只要是能够使第1终端10a的持有人识别在死角区域bld存在车辆这一情况的图像,则可以是任何图像。
117.例如,在第1终端显示装置15a是第1终端10a的显示器的情况下,第1终端控制装置12a通过第1终端显示处理,在第1终端10a的显示器显示通知图像。
118.由此,第1终端10a的持有人能够知晓在死角区域bld存在移动体mb(本例的情况下是车辆)这一情况。
119.进而,车辆控制装置12v在判定为第1通知条件c1成立时,判定第2通知条件c2是否成立。车辆控制装置12v可以构成为,在判定为第1通知条件c1成立时判定为第2通知条件c2也成立,但在本例中,在接触可能性运算值vc成为预定的第2运算值vc_2以上的情况下,判定为第2通知条件c2成立。第2运算值vc_2被设定为是比第1运算值vc_1大的值。
120.车辆控制装置12v在判定为第2通知条件c2成立时,通过执行车辆警报处理,将在死角区域bld存在移动体mb这一情况向驾驶员10d通知。车辆警报处理是从车辆扬声器16v发出通知声的处理。从车辆扬声器16v发出的通知声可以是单调的警报声,也可以是人的声音(广播:announce)。
121.由此,驾驶员10d能够知晓在死角区域bld存在移动体mb(例如,行人)这一情况。
122.进而,车辆控制装置12v在判定为第2通知条件c2成立时,发送第1终端警报指令信号sale_a。第1终端警报指令信号sale_a是表示第1终端警报指令的车辆信号sv。
123.第1终端控制装置12a在取得第1终端警报指令信号sale_a时,将在死角区域bld存
在车辆(即,本车辆10v)这一情况向第1终端10a的持有人通知。更具体而言,第1终端控制装置12a在取得第1终端警报指令信号sale_a时,通过执行第1终端警报处理,将在死角区域bld存在移动体mb这一情况向第1终端10a的持有人通知。第1终端警报处理是使得从第1终端扬声器16a产生通知声的处理。另外,从第1终端扬声器16a发出的通知声可以是单调的警报声,也可以是人的声音(广播)。
124.由此,第1终端10a的持有人能够知晓在死角区域bld存在移动体mb(本例的情况下为车辆)这一情况。
125.此外,车辆控制装置12v也可以构成为,不发送第1终端显示指令信号sdis_a以及第1终端警报指令信号sale_a,而发送表示接触可能性运算值vc的车辆信号sv。该情况下,第1终端控制装置12a从该车辆信号sv取得接触可能性运算值vc,在该接触可能性运算值vc为第1运算值vc_1以上的情况下,执行第1终端显示处理,在接触可能性运算值vc为第2运算值vc_2以上的情况下,执行第1终端警报处理。
126.<死角区域的确定>
127.接着,对死角区域bld的确定方法进行说明。地图信息包含与建筑物以及设备等相对于车辆的驾驶员产生死角区域的物体相关的信息。因此,能够根据本车辆10v的当前位置和地图信息知晓成为驾驶员10d的死角的区域。因此,车辆控制装置12v基于本车辆10v的当前位置和地图信息确定死角区域bld。
128.或者,在根据第1终端信号sa表示的第1终端位置信息确定出第1终端10a的位置时存在于该位置的移动体mb无法从前方状况检测信息被取得的情况下,第1终端10a的位置周边的区域成为驾驶员10d的死角区域。因此,车辆控制装置12v也可以构成为,基于第1终端信号sa表示的第1终端位置信息和前方状况检测信息确定死角区域bld。
129.此外,第1终端控制装置12a在从相同的死角区域bld存在的多个车辆取得了第1终端显示指令信号sdis_a的情况下,针对该死角区域bld,仅执行1次第1终端显示处理。同样地,第1终端控制装置12a在从相同的死角区域bld存在的多个车辆取得了第1终端警报指令信号sale_a的情况下,针对该死角区域bld,仅执行1次第1终端警报处理。
130.另外,第1终端控制装置12a在从不同的死角区域bld存在的多个车辆取得了第1终端显示指令信号的情况下,仅针对最近的车辆,执行第1终端显示处理。同样地,第1终端控制装置12a在从不同的死角区域bld存在的多个车辆取得了第1终端警报指令信号的情况下,仅执行1次第1终端警报处理。
131.此外,车辆控制装置12v在针对在相同的死角区域bld存在的多个移动体mb而第1通知条件c1成立的情况下,针对该死角区域bld,可以通过第1终端显示处理显示仅1个移动体mb,也可以显示2个以上(特别是全部)的移动体mb。另外,车辆控制装置12v在针对在相同的死角区域bld存在的多个移动体mb而第2通知条件c2成立的情况下,针对该死角区域bld,可以仅执行1次第1终端警报处理,也可以执行2次以上(特别是与移动体mb的数量相等的次数)。
132.另外,车辆控制装置12v在针对在不同的死角区域bld存在的多个移动体mb而第1通知条件c1成立的情况下,通过第1终端显示处理,可以仅显示最近的移动体mb的图像,也可以显示2个以上(特别是全部)的移动体mb的图像。另外,车辆控制装置12v在针对在不同的死角区域bld存在多个移动体mb而第2通知条件c2成立的情况下,可以仅执行1次车辆警
报处理,也可以执行2次以上(特别是与移动体mb的数量相等的次数)。
133.以上是第1实施方式的移动体检测系统10的工作。
134.若车辆控制装置12v与第1终端控制装置12a之间的通信周期(即,信号取得周期以及信号发送周期)短,则车辆控制装置12v能够高精度地追踪第1终端10a的举动,进而,能够高精度地追踪移动体mb的举动。由此,车辆控制装置12v能够高精度地监视移动体mb的举动,其结果,也能够高精度地预测移动体mb从死角区域bld突然出现在本车辆10v的前方、移动体mb与本车辆10v接触。因此,车辆控制装置12v能够准确进行向驾驶员10d通知移动体mb的存在和/或向第1终端10a的持有人通知本车辆10v的存在。
135.然而,若通信周期短,则车辆控制装置12v以及第1终端控制装置12a的消耗的电力量变大。其结果,导致本车辆10v的电池以及第1终端10a的电池的耗电量变大。
136.当然,若延长通信周期,则能够抑制电池的耗电量。然而,这样一来,无法高精度地追踪移动体mb的举动。其结果,无法高精度地进行移动体mb的突然出现预测和/或移动体mb与本车辆10v的接触预测。因此,无法准确进行向驾驶员10d通知移动体mb的存在和/或向第1终端10a的持有人通知本车辆10v的存在,会使驾驶员10d和/或第1终端10a的持有人感到烦躁,而且根据情况的不同,很有可能使驾驶员10d对驾驶的注意力降低。
137.根据第1实施方式的移动体检测系统10,车辆控制装置12v与第1终端控制装置12a之间的通信周期,在死角条件cbld不成立时,被设定为长周期,在死角条件cbld成立时,被设定为短周期。因此,在抑制本车辆10v的电池和/或第1终端10a的电池的耗电量的同时,能够高精度地追踪在死角区域bld存在的移动体mb的举动。
138.此外,在本例中,针对车辆控制装置12v,第1取得周期cy1_r与第1发送周期cy1_t为相同长度的周期,第2取得周期cy2_r与第2发送周期cy2_t为相同长度的周期,但是只要第2取得周期cy2_r比第1取得周期cy1_r短且第2发送周期cy2_t比第1发送周期cy1_t短,第1取得周期cy1_r与第1发送周期cy1_t也可以是不同长度的周期,第2取得周期cy2_r与第2发送周期cy2_t也可以是不同长度的周期。
139.同样地,在本例中,针对第1终端控制装置12a,第1取得周期cy1_r与第1发送周期cy1_t为相同长度的周期,第2取得周期cy2_r与第2发送周期cy2_t为相同长度的周期,但是只要第2取得周期cy2_r比第1取得周期cy1_r短且第2发送周期cy2_t比第1发送周期cy1_t短,第1取得周期cy1_r与第1发送周期cy1_t也可以是不同长度的周期,第2取得周期cy2_r与第2发送周期cy2_t也可以是不同长度的周期。
140.<移动体检测系统的具体工作>
141.接着,针对第1实施方式的移动体检测系统10的具体工作进行说明。
142.<车辆控制装置例程>
143.该移动体检测系统10的车辆控制装置12v构成为每经过预定时间执行图5所示的例程。
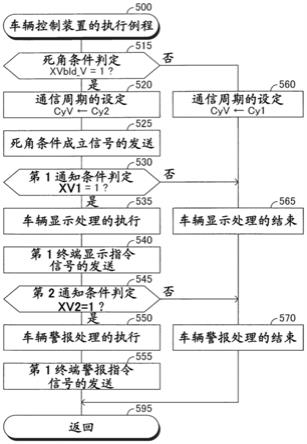
144.因此,在到了预定的时机时,车辆控制装置12v从图5的步骤500开始处理,使该处理进入步骤515,判定死角条件成立标志xvbld的值是否是“1”。死角条件成立标志xvbld是表示死角条件cbld是否成立的标志。
145.死角条件成立标志xvbld的值在死角条件cbld成立时通过车辆控制装置12v被设定为“1”,在死角条件cbld不成立时通过车辆控制装置12v被设定为“0”。
146.车辆控制装置12v在步骤515中判定为“是”的情况下,使处理进入步骤520,将其自身的通信周期cyv设定为第2通信周期cy2。即,车辆控制装置12v将其自身的信号取得周期设定为第2取得周期cy2_r,并且将其自身的信号发送周期设定为第2发送周期cy2_t。
147.接着,车辆控制装置12v使处理进入步骤525,发送死角条件成立信号sbld。
148.接着,车辆控制装置12v使处理进入步骤530,判定第1通知条件成立标志xv1的值是否是“1”。第1通知条件成立标志xv1是表示第1通知条件c1是否成立的标志。
149.第1通知条件成立标志xv1的值在第1通知条件c1成立时通过车辆控制装置12v被设定为“1”,在第1通知条件c1不成立时通过车辆控制装置12v被设定为“0”。
150.车辆控制装置12v在步骤530中判定为“是”的情况下,使处理进入步骤535,执行车辆显示处理。由此,在车辆显示装置15v显示通知图像。接着,车辆控制装置12v使处理进入步骤540,发送第1终端显示指令信号sdis_a。
151.接着,车辆控制装置12v使处理进入步骤545,判定第2通知条件成立标志xv2的值是否是“1”。第2通知条件成立标志xv2是表示第2通知条件c2是否成立的标志。
152.第2通知条件成立标志xv2的值在第2通知条件c2成立时通过车辆控制装置12v被设定为“1”,在第2通知条件c2不成立时通过车辆控制装置12v被设定为“0”。
153.车辆控制装置12v在步骤545中判定为“是”的情况下,使处理进入步骤550,执行车辆警报处理。由此,从车辆扬声器16v发出通知声。接着,车辆控制装置12v使处理进入步骤555,发送第1终端警报指令信号sale_a,接着,使处理进入步骤595,暂时结束本例程。
154.另一方面,车辆控制装置12v在步骤545中判定为“否”的情况下,使处理进入步骤570,结束车辆警报处理,接着,使处理进入步骤595,暂时结束本例程。
155.另外,车辆控制装置12v在步骤530中判定为“否”的情况下,使处理进入步骤565,结束车辆显示处理,接着,使处理进入步骤570,结束车辆警报处理,接着,使处理进入步骤595,暂时结束本例程。
156.另外,车辆控制装置12v在步骤515中判定为“否”的情况下,使处理进入步骤560,将其自身的通信周期cyv设定为第1通信周期cy1。即,车辆控制装置12v将其自身的信号取得周期设定为第1取得周期cy1_r,并且将其自身的信号发送周期设定为第1发送周期cy1_t。
157.接着,车辆控制装置12v使处理进入步骤565,结束车辆显示处理,接着,使处理进入步骤570,结束车辆警报处理,接着,使处理进入步骤595,暂时结束本例程。
158.<第1终端控制装置例程>
159.另外,移动体检测系统10的第1终端控制装置12a构成为,每经过预定时间执行图6所示的例程。
160.因此,当到了预定的时机时,第1终端控制装置12a从图6的步骤600开始处理,使该处理进入步骤605,判定死角条件成立标志xabld的值是否是“1”。死角条件成立标志xabld是表示死角条件cbld是否成立的标志。
161.死角条件成立标志xabld的值在第1终端控制装置12a取得死角条件成立信号sbld时通过第1终端控制装置12a被设定为“1”,在第1终端控制装置12a不再取得死角条件成立信号sbld时通过第1终端控制装置12a被设定为“0”。
162.第1终端控制装置12a在步骤605中判定为“是”的情况下,使处理进入步骤610,将
其自身的通信周期cya设定为第2通信周期cy2。即,第1终端控制装置12a将其自身的信号取得周期设定为第2取得周期cy2_r,并且将其自身的信号发送周期设定为第2发送周期cy2_t。
163.接着,第1终端控制装置12a使处理进入步骤615,判定第1终端显示指令标志xadis的值是否是“1”。第1终端显示指令标志xadis是表示第1通知条件c1是否成立的标志。
164.第1终端显示指令标志xadis的值在第1终端控制装置12a取得第1终端显示指令信号sdis_a时通过第1终端控制装置12a被设定为“1”,在第1终端控制装置12a不再取得第1终端显示指令信号sdis_a时,通过第1终端控制装置12a被设定为“0”。
165.第1终端控制装置12a在步骤615中判定为“是”的情况下,使处理进入步骤620,执行第1终端显示处理。由此,在第1终端显示装置15a显示通知图像。
166.接着,第1终端控制装置12a使处理进入步骤625,判定第1终端警报指令标志xaale的值是否是“1”。第1终端警报指令标志xaale是表示第2通知条件c2是否成立的标志。
167.第1终端警报指令标志xaale的值在第1终端控制装置12a取得第1终端警报指令信号sale_a时通过第1终端控制装置12a被设定为“1”,在第1终端控制装置12a不再取得第1终端警报指令信号sale_a时通过第1终端控制装置12a被设定为“0”。
168.第1终端控制装置12a在步骤625中判定为“是”的情况下,使处理进入步骤630,执行第1终端警报处理。由此,从第1终端扬声器16a发出通知声。接着,第1终端控制装置12a使处理进入步骤695,暂时结束本例程。
169.另一方面,第1终端控制装置12a在步骤625中判定为“否”的情况下,使处理进入步骤645,结束第1终端警报处理,接着,使处理进入步骤695,暂时结束本例程。
170.另外,第1终端控制装置12a在步骤615中判定为“否”的情况下,使处理进入步骤640,结束第1终端显示处理,接着,使处理进入步骤645,结束第1终端警报处理,接着,使处理进入步骤695,暂时结束本例程。
171.另外,第1终端控制装置12a在步骤605中判定为“否”的情况下,使处理进入步骤635,将其自身的通信周期cya设定为第1通信周期cy1。即,第1终端控制装置12a将其自身的信号取得周期设定为第1取得周期cy1_r,并且将其自身的信号发送周期设定为第1发送周期cy1_t。
172.接着,第1终端控制装置12a使处理进入步骤640,结束第1终端显示处理,接着,使处理进入步骤645,结束第1终端警报处理,接着,使处理进入步骤695,暂时结束本例程。
173.以上是移动体检测系统10的具体工作。
174.<第1实施方式的变形例>
175.此外,移动体检测系统10也可以构成为,在驾驶员10d持有与第1终端10a同样的终端(以下“第2终端10b”)的情况下,利用该第2终端10b将在死角区域bld存在移动体mb这一情况向驾驶员10d通知。针对这样构成的第1实施方式的变形例的移动体检测系统10进行说明。
176.如图7所示,该移动体检测系统10除了车辆控制系统11v以及第1终端控制系统11a以外,还包含第2终端控制系统11b。
177.<第2终端控制系统>
178.第2终端控制系统11b包含:第2终端控制装置12b、第2终端发送装置13b、第2终端
接收装置14b、第2终端显示装置15b以及第2终端扬声器16b。
179.<第2终端控制装置>
180.第2终端控制装置12b搭载于第2终端10b。第2终端10b是人能够携带的终端,例如是便携电话终端或人能够带在身上的终端。在第2实施方式中,第2终端10b为驾驶员10d所持有。第2终端控制装置12b包含电子控制装置(即ecu)19b。第2终端10b的ecu19b具备:cpu、rom、ram以及接口。
181.<第2终端发送装置>
182.第2终端发送装置13b搭载于第2终端10b。第2终端发送装置13b与第2终端控制装置12b电连接。第2终端控制装置12b能够经由第2终端发送装置13b发送无线信号。以下,将第2终端控制装置12b发送的无线信号称为“第2终端信号sb”。
183.<第2终端接收装置>
184.第2终端接收装置14b搭载于第2终端10b。第2终端接收装置14b与第2终端控制装置12b电连接。第2终端控制装置12b能够经由第2终端接收装置14b取得无线信号。
185.此外,第2终端发送装置13b和第2终端接收装置14b也可以是具备接收无线信号的功能和发送无线信号的功能的1个收发装置。
186.<第2终端显示装置>
187.第2终端显示装置15b搭载于第2终端10b。第2终端显示装置15b与第2终端控制装置12b电连接。第2终端控制装置12b能够将各种图像显示于第2终端显示装置15b。第2终端显示装置15b例如是第2终端10b的显示器。
188.<第2终端扬声器>
189.第2终端扬声器16b搭载于第2终端10b。第2终端扬声器16b与第2终端控制装置12b电连接。第2终端控制装置12b能够使得从第2终端扬声器16b产生各种声音。
190.此外,第1实施方式的变形例的移动体检测系统10在车辆发送装置13v与第2终端接收装置14b之间,作为通信方式采用了以无线方式直接通信的直接通信方式,但是也可以采用云通信方式。
191.另外,在本例中,第2终端控制装置12b构成为,即使专用的应用程序不在该第2终端控制装置12b中运行,也执行信号发送处理以及信号取得处理等与第2终端控制装置12b的工作相关的处理。然而,第2终端控制装置12b也可以构成为,在专用的移动体检测应用程序在该第2终端控制装置12b中运行时,执行这些处理。此外,移动体检测应用程序是预先安装于第2终端控制装置12b的应用程序,并且是为了将第2终端10b作为移动体检测系统10的一部分加以利用而由第2终端10b的持有人启动的应用程序。
192.<第1实施方式的变形例的移动体检测系统的工作>
193.接着,对第1实施方式的变形例的移动体检测系统10的工作进行说明。
194.第2终端控制装置12b也可以在没有取得死角条件成立信号sbld期间,以第1发送周期cy1_t执行用于发送无线信号的信号发送处理,并且以第1取得周期cy1_r执行用于取得无线信号的信号取得处理。
195.当第2终端信号sb到达车辆接收装置14v时,车辆控制装置12v取得该第2终端信号sb。车辆控制装置12v基于第2终端信号sb表示的第2终端10b的位置信息判定第2终端10b是否存在于本车辆10v内。车辆控制装置12v在判定为第2终端10b存在于本车辆10v内的情况
下,将第2终端10b识别为能够作为移动体检测系统10的一部分加以利用的终端。
196.另一方面,车辆控制装置12v在取得第1终端信号sa时,取得第1终端信号sa表示的第1终端10a的位置信息,并且确定死角区域bld。车辆控制装置12v在基于第1终端10a的位置信息以及死角区域bld判定为在死角区域bld存在第1终端10a的情况下,判定为死角条件cbld成立。即,车辆控制装置12v判定为在死角区域bld存在移动体mb。
197.车辆控制装置12v在判定为死角条件cbld成立时,将信号取得周期从第1取得周期cy1_r向第2取得周期cy2_r变更。
198.进而,车辆控制装置12v在判定为死角条件cbld成立时,开始信号发送处理。之后,车辆控制装置12v以第2发送周期cy2_t执行信号发送处理,直到死角条件cbld不成立为止。
199.车辆控制装置12v通过信号发送处理,发送死角条件成立信号sbld。
200.第1终端控制装置12a在取得死角条件成立信号sbld时,将信号发送周期从第1发送周期cy1_t向第2发送周期cy2_t变更,并且将信号取得周期从第1取得周期cy1_r向第2取得周期cy2_r变更。
201.另外,第2终端控制装置12b在取得死角条件成立信号sbld时,将信号发送周期从第1发送周期cy1_t向第2发送周期cy2_t变更,并且将信号取得周期从第1取得周期cy1_r向第2取得周期cy2_r变更。
202.因此,第2终端控制装置12b在取得了死角条件成立信号sbld之后,到不再取得死角条件成立信号sbld为止的期间,以第2发送周期cy2_t执行信号发送处理,并且以第2取得周期cy2_r执行信号取得处理。
203.另外,车辆控制装置12v在判定为死角条件cbld成立时,判定第1通知条件c1是否成立。车辆控制装置12v在接触可能性运算值vc成为预定的第1运算值vc_1以上的情况下,判定为第1通知条件c1成立。
204.车辆控制装置12v在判定为第1通知条件c1成立时,通过执行车辆显示处理,将在死角区域bld存在移动体mb这一情况向驾驶员10d通知。
205.进而,车辆控制装置12v在判定为第1通知条件c1成立时,发送第1终端显示指令信号sdis_a。
206.第1终端控制装置12a在取得第1终端显示指令信号sdis_a时,通过执行第1终端显示处理,将在死角区域bld存在移动体mb这一情况向第1终端10a的持有人通知。
207.进而,车辆控制装置12v在判定为第1通知条件c1成立时,发送第2终端显示指令信号sdis_b。第2终端显示指令信号sdis_b是表示第2终端显示指令的车辆信号sv。
208.第2终端控制装置12b在取得第2终端显示指令信号sdis_b时,将在死角区域bld存在移动体mb这一情况向第2终端10b的持有人(本例的情况下是驾驶员10d)通知。更具体而言,第2终端控制装置12b在取得第2终端显示指令信号sdis_b时,通过执行第2终端显示处理,将在死角区域bld存在移动体mb这一情况向第2终端10b的持有人通知。第2终端显示处理是将通知图像显示于第2终端显示装置15b的处理。另外,第2终端显示装置15b所显示的通知图像只要是能够使第2终端10b的持有人识别在死角区域bld存在移动体mb这一情况的图像,则可以是任何图像。
209.例如,在第2终端显示装置15b是第2终端10b的显示器的情况下,第2终端控制装置12b通过第2终端显示处理在第2终端10b的显示器显示通知图像。
210.由此,第2终端10b的持有人(在本例的情况下是驾驶员10d)能够知晓在死角区域bld存在移动体mb(例如,行人)这一情况。
211.进而,车辆控制装置12v在判定为第1通知条件c1成立时,判定第2通知条件c2是否成立。车辆控制装置12v在接触可能性运算值vc成为预定的第2运算值vc_2以上的情况下,判定为第2通知条件c2成立。
212.车辆控制装置12v在判定为第2通知条件c2成立时,通过执行车辆警报处理,将在死角区域bld存在移动体mb这一情况向驾驶员10d通知。
213.进而,车辆控制装置12v在判定为第2通知条件c2成立时,发送第1终端警报指令信号sale_a。
214.第1终端控制装置12a在取得第1终端警报指令信号sale_a时,通过执行第1终端警报处理,将在死角区域bld存在移动体mb这一情况向第1终端10a的持有人通知。
215.进而,车辆控制装置12v在判定为第2通知条件c2成立时,发送第2终端警报指令信号sale_b。第2终端警报指令信号sale_b是表示第2终端警报指令的车辆信号sv。
216.第2终端控制装置12b在取得第2终端警报指令信号sale_b时,将在死角区域bld存在移动体mb(例如,行人)这一情况向第2终端10b的持有人(本例的情况下是驾驶员10d)通知。更具体而言,第2终端控制装置12b在取得第2终端警报指令信号sale_b时,通过执行第2终端警报处理,将在死角区域bld存在移动体mb这一情况向第2终端10b的持有人通知。第2终端警报处理是使得从第2终端扬声器16b产生通知声的处理。另外,从第2终端扬声器16b发出的通知声可以是单调的警报声,也可以是人的声音(广播)。
217.由此,第2终端10b的持有人(本例的情况下是驾驶员10d)能够知晓在死角区域bld存在移动体mb(例如,行人)。
218.此外,车辆控制装置12v也可以构成为,不发送第2终端显示指令信号sdis_b以及第2终端警报指令信号sale_b,而是发送表示接触可能性运算值vc的车辆信号sv。该情况下,第2终端控制装置12b取得该车辆信号sv,取得该车辆信号sv表示的接触可能性运算值vc,在该接触可能性运算值vc为第1运算值vc_1以上的情况下,执行第2终端显示处理,在接触可能性运算值vc为第2运算值vc_2以上的情况下,执行第2终端警报处理。
219.另外,第2终端控制装置12b针对在相同的死角区域bld存在的多个移动体mb取得了第2终端显示指令信号sdis_b的情况下,针对该死角区域bld,仅执行1次第2终端显示处理。同样地,第2终端控制装置12b针对在相同的死角区域bld存在的多个移动体mb取得了第2终端警报指令信号sale_b的情况下,针对该死角区域bld,仅执行1次第2终端警报处理。
220.另外,第2终端控制装置12b在针对在不同的死角区域bld存在的多个移动体mb取得了第2终端显示指令信号的情况下,仅针对最近的移动体mb执行第2终端显示处理。同样地,第2终端控制装置12b在针对在不同的死角区域bld存在的多个移动体mb取得了第2终端警报指令信号的情况下,仅执行1次第2终端警报处理。
221.以上是第1实施方式的变形例的移动体检测系统10的工作。由此,能够利用第2终端10b使驾驶员10d知晓在死角区域bld存在移动体mb这一情况。
222.<第1实施方式的变形例的移动体检测系统的具体工作>
223.接着,说明第1实施方式的变形例的移动体检测系统10的具体工作。
224.<车辆控制装置例程>
225.该移动体检测系统10的车辆控制装置12v构成为每经过预定时间执行图8所示的例程。
226.图8所示的例程的步骤815至步骤870的处理除了“追加步骤805的处理这一点”以及“变更了步骤840以及步骤855的处理的一部分这一点”以外,分别与图5所示的例程的步骤515至步骤570的处理相同。
227.车辆控制装置12v当到了预定的时机(timing)时,从图8的步骤800开始处理,在使该处理进入步骤805时,判定车辆内判定标志xvin的值是否是“1”。车辆内判定标志xvin是表示第2终端10b是否存在于本车辆10v内的标志。
228.车辆内判定标志xvin的值在车辆控制装置12v判定为第2终端10b存在于本车辆10v内时通过车辆控制装置12v被设定为“1”,在车辆控制装置12v判定为第2终端10b不存在于本车辆10v内时通过车辆控制装置12v被设定为“0”。
229.车辆控制装置12v在步骤805中判定为“是”的情况下,使处理进入步骤815。另一方面,车辆控制装置12v在步骤805中判定为“否”的情况下,使处理进入步骤860。
230.另外,车辆控制装置12v在使处理进入步骤840的情况下,发送第1终端显示指令信号sdis_a以及第2终端显示指令信号sdis_b。另外,车辆控制装置12v在使处理进入步骤855的情况下,发送第1终端警报指令信号sale_a以及第2终端警报指令信号sale_b。
231.<第1终端控制装置例程>
232.进而,第1实施方式的变形例的第1终端控制装置12a构成为每经过预定时间执行前面说明过的图6所示的例程。
233.<第2终端控制装置例程>
234.进而,第1实施方式的变形例的第2终端控制装置12b构成为每经过预定时间执行图9所示的例程。
235.因此,当到了预定的时机时,第2终端控制装置12b从图9的步骤900起开始处理,使该处理进入步骤905,判定死角条件成立标志xbbld的值是否是“1”。死角条件成立标志xbbld是表示死角条件cbld是否成立的标志。
236.死角条件成立标志xbbld的值在第2终端控制装置12b取得了死角条件成立信号sbld时通过第2终端控制装置12b被设定为“1”,在第2终端控制装置12b不再取得死角条件成立信号sbld时通过第2终端控制装置12b被设定为“0”。
237.第2终端控制装置12b在步骤905中判定为“是”的情况下,使处理进入步骤910,将其自身的通信周期cyb设定为第2通信周期cy2。即,第2终端控制装置12b将其自身的信号取得周期设定为第2取得周期cy2_r,并且将其自身的信号发送周期设定为第2发送周期cy2_t。
238.接着,第2终端控制装置12b使处理进入步骤915,判定第2终端显示指令标志xbdis的值是否是“1”。第2终端显示指令标志xbdis是表示第1通知条件c1是否成立的标志。
239.第2终端显示指令标志xbdis的值在第2终端控制装置12b取得了第2终端显示指令信号sdis_b时通过第2终端控制装置12b被设定为“1”,在第2终端控制装置12b不再取得第2终端显示指令信号sdis_b时通过第2终端控制装置12b被设定为“0”。
240.第2终端控制装置12b在步骤915中判定为“是”的情况下,使处理进入步骤920,执行第2终端显示处理。由此,在第2终端显示装置15b显示通知图像。
241.接着,第2终端控制装置12b使处理进入步骤925,判定第2终端警报指令标志xbale的值是否是“1”。第2终端警报指令标志xbale是表示第2通知条件c2是否成立的标志。
242.第2终端警报指令标志xbale的值在第2终端控制装置12b取得了第2终端警报指令信号sale_b时通过第2终端控制装置12b被设定为“1”,在第2终端控制装置12b不再取得第2终端警报指令信号sale_b时通过第2终端控制装置12b被设定为“0”。
243.第2终端控制装置12b在步骤925中判定为“是”的情况下,使处理进入步骤930,执行第2终端警报处理。由此,使得从第2终端扬声器16b发出通知声。接着,第2终端控制装置12b使处理进入步骤995,暂时结束本例程。
244.另一方面,第2终端控制装置12b在步骤925中判定为“否”的情况下,使处理进入步骤945,结束第2终端警报处理,接着,使处理进入步骤995,暂时结束本例程。
245.另外,第2终端控制装置12b在步骤915中判定为“否”的情况下,使处理进入步骤940,结束第2终端显示处理,接着,使处理进入步骤945,结束第2终端警报处理,接着,使处理进入步骤995,暂时结束本例程。
246.另外,第2终端控制装置12b在步骤905中判定为“否”的情况下,使处理进入步骤935,将通信周期cyb设定为第1通信周期cy1。即,第2终端控制装置12b将其自身的信号取得周期设定为第1取得周期cy1_r,并且将其自身的信号发送周期设定为第1发送周期cy1_t。
247.接着,第2终端控制装置12b使处理进入步骤940,结束第2终端显示处理,接着,使处理进入步骤945,结束第2终端警报处理,接着,使处理进入步骤995,暂时结束本例程。
248.以上是第1实施方式的变形例的移动体检测系统10的具体工作。
249.<第2实施方式>
250.然而,移动体检测系统10如图10所示,也可以构成为在除了车辆控制系统11v以及第1终端控制系统11a以外,还包含第2终端控制系统11b的情况下,将第2终端控制装置12b作为主控制装置加以利用。接着,对这样构成的本发明的第2实施方式的移动体检测系统10进行说明。
251.此外,第2实施方式的移动体检测系统10,作为在第1终端发送装置13a与第2终端接收装置14b之间的通信方式、在第2终端发送装置13b与车辆接收装置14v之间的通信方式、在车辆发送装置13v与第2终端接收装置14b之间的通信方式、以及在第2终端发送装置13b与第1终端接收装置14a之间的通信方式,采用了以无线方式直接通信的直接通信方式,但是也可以采用云通信方式。
252.<第2实施方式的移动体检测系统的工作>
253.第2终端控制装置12b在死角条件cbld不成立的期间,以第1取得周期cy1_r执行用于取得无线信号的信号取得处理,并且以第1发送周期cy1_t执行用于发送无线信号的信号发送处理。
254.另外,第1终端控制装置12a在没有取得死角条件成立信号sbld期间,以第1发送周期cy1_t执行用于发送无线信号的信号发送处理,并且以第1取得周期cy1_r执行用于取得无线信号的信号取得处理。
255.另外,车辆控制装置12v在没有取得死角条件成立信号sbld期间,以第1取得周期cy1_r执行用于取得无线信号的信号取得处理。
256.在第2终端信号sb到达车辆接收装置14v时,车辆控制装置12v取得该第2终端信号
sb。车辆控制装置12v基于该第2终端信号sb表示的第2终端10b的位置信息判定第2终端10b是否存在于本车辆10v内。车辆控制装置12v在判定为第2终端10b存在于本车辆10v内的情况下,发送第2终端识别信号svid。第2终端识别信号svid是表示第2终端10b存在于本车辆10v内这一情况的车辆信号sv。
257.第2终端控制装置12b取得第2终端识别信号svid。
258.另一方面,在第1终端信号sa到达第2终端接收装置14b时,第2终端控制装置12b取得第1终端信号sa。第2终端控制装置12b在取得第2终端识别信号svid时取得了第1终端信号sa的情况下,发送死角区域信息请求信号sreq_bld。死角区域信息请求信号sreq_bld是向车辆控制装置12v请求死角区域信息信号sinfo_bld的发送的第2终端信号sb。另外,死角区域信息信号sinfo_bld是表示死角区域信息的车辆信号sv。另外,死角区域信息是与死角区域bld相关的信息。
259.车辆控制装置12v在取得死角区域信息请求信号sreq_bld时,开始用于发送死角区域信息信号sinfo_bld的信号发送处理。之后,车辆控制装置12v以第1发送周期cy1_t执行信号发送处理直到取得死角条件成立信号sbld为止。
260.第2终端控制装置12b在取得死角区域信息信号sinfo_bld时,取得死角区域信息信号sinfo_bld表示的死角区域信息。另外,第2终端控制装置12b取得第1终端信号sa表示的第1终端位置信息。
261.第2终端控制装置12b基于死角区域信息以及第1终端位置信息判定死角条件cbld是否成立。
262.此外,第2终端控制装置12b也可以构成为,在取得了第1终端信号sa时发送前方状况检测信息请求信号sreq_det。前方状况检测信息请求信号sreq_det是向车辆控制装置12v请求前方状况检测信息信号sinfo_det的发送的第2终端信号sb。另外,前方状况检测信息信号sinfo_det是表示前方状况检测信息的车辆信号sv。车辆控制装置12v在取得前方状况检测信息请求信号sreq_det时,发送前方状况检测信息信号sinfo_det。第2终端控制装置12b取得前方状况检测信息信号sinfo_det,根据其表示的前方状况检测信息来把握死角区域bld,基于该死角区域bld以及第1终端位置信息判定死角条件cbld是否成立。
263.第2终端控制装置12b在判定为死角条件cbld成立时,将信号取得周期从第1取得周期cy1_r向第2取得周期cy2_r变更,并且将信号发送周期从第1发送周期cy1_t向第2发送周期cy2_t变更。
264.因此,第2终端控制装置12b在判定为死角条件cbld成立之后,直到判定为死角条件cbld不成立为止的期间,以第2取得周期cy2_r执行信号取得处理,并且以第2发送周期cy2_t执行信号发送处理。
265.进而,第2终端控制装置12b在判定为死角条件cbld成立时,发送死角条件成立信号sbld。死角条件成立信号sbld是表示死角条件cbld成立这一情况的第2终端信号sb。
266.第1终端控制装置12a以及车辆控制装置12v在取得死角条件成立信号sbld时,将信号发送周期从第1发送周期cy1_t向第2发送周期cy2_t变更,并且将信号取得周期从第1取得周期cy1_r向第2取得周期cy2_r变更。
267.因此,第1终端控制装置12a以及车辆控制装置12v在取得了死角条件成立信号sbld之后,直到不再取得死角条件成立信号sbld为止的期间,以第2发送周期cy2_t执行信
号发送处理,并且以第2取得周期cy2_r执行信号取得处理。
268.另外,第2终端控制装置12b在判定为死角条件cbld成立时,判定第1通知条件c1是否成立。第2终端控制装置12b也可以构成为,在判定为死角条件cbld成立时判定为第1通知条件c1也成立,但在本例中,在接触可能性运算值vc成为了预定的第1运算值vc_1以上的情况下,判定为第1通知条件c1成立。
269.第2终端控制装置12b通过与之前说明的方法同样的方法,计算接触可能性运算值vc。
270.即,第2终端控制装置12b通过以时序方式分析从第1终端位置信息取得的第1终端10a的位置,取得第1终端举动参数。
271.另一方面,车辆控制装置12v在取得死角条件成立信号sbld时,发送本车辆举动信息信号sveh。本车辆举动信息信号sveh是表示本车辆举动信息的车辆信号sv。本车辆举动信息是与本车辆举动参数相关的信息。
272.第2终端控制装置12b取得本车辆举动信息信号sveh,基于该信号sveh表示的本车辆举动信息取得本车辆举动参数。
273.第2终端控制装置12b基于这些第1终端举动参数以及本车辆举动参数,计算表示本车辆10v与第1终端10a的持有人接触的可能性的接触可能性运算值vc。
274.第2终端控制装置12b在判定为第1通知条件c1成立时,将在死角区域bld存在移动体mb这一情况向驾驶员10d通知。更具体而言,第2终端控制装置12b在判定为第1通知条件c1成立时,通过执行第2终端显示处理,将在死角区域bld存在移动体mb这一情况向驾驶员10d通知。
275.由此,第2终端10b的持有人(在本例中为驾驶员10d)能够知晓在死角区域bld存在移动体mb这一情况。
276.此外,第2终端控制装置12b也可以构成为,在判定为第1通知条件c1成立的情况下,发送车辆显示指令信号sdis_v。车辆显示指令信号sdis_v是表示车辆显示指令的第2终端信号sb。车辆控制装置12v在取得车辆显示指令信号sdis_v时,执行车辆显示处理。
277.进而,第2终端控制装置12b在判定为第1通知条件c1成立时,发送第1终端显示指令信号sdis_a。第1终端显示指令信号sdis_a是表示第1终端显示指令的第2终端信号sb。第1终端控制装置12a在取得第1终端显示指令信号sdis_a时,执行第1终端显示处理。
278.进而,第2终端控制装置12b在判定为第1通知条件c1成立时,判定第2通知条件c2是否成立。
279.第2终端控制装置12b也可以构成为,在判定为第1通知条件c1成立时判定为第2通知条件c2也成立,但是在本例中,在接触可能性运算值vc为预定的第2运算值vc_2以上的情况下,判定为第2通知条件c2成立。
280.第2终端控制装置12b在判定为第2通知条件c2成立时,通过执行第2终端警报处理,将在死角区域bld存在移动体mb这一情况向驾驶员10d通知。
281.由此,驾驶员10d能够知晓在死角区域bld存在移动体mb(例如,行人)这一情况。
282.进而,第2终端控制装置12b在判定为第2通知条件c2成立时,发送第1终端警报指令信号sale_a。第1终端警报指令信号sale_a是表示第1终端警报指令的第2终端信号sb。
283.第1终端控制装置12a在取得第1终端警报指令信号sale_a时,通过执行第1终端警
报处理,将在死角区域bld存在移动体mb这一情况向第1终端10a的持有人通知。
284.此外,第2终端控制装置12b也可以构成为,在判定为第2通知条件c2成立时发送车辆警报指令信号sale_v。车辆警报指令信号sale_v是表示车辆警报指令的第2终端信号sb。车辆控制装置12v在取得车辆警报指令信号sale_v时,执行车辆警报处理。
285.另外,第2终端控制装置12b也可以构成为,不发送第1终端显示指令信号sdis_a以及第1终端警报指令信号sale_a,而是发送表示接触可能性运算值vc的第2终端信号sb。该情况下,第1终端控制装置12a取得该第2终端信号sb,取得该信号sb表示的接触可能性运算值vc,在该接触可能性运算值vc为第1运算值vc_1以上的情况下,执行第1终端显示处理,在接触可能性运算值vc为第2运算值vc_2以上的情况下,执行第1终端警报处理。
286.另外,第2终端控制装置12b在针对在相同的死角区域bld存在的多个移动体mb而第1通知条件c1成立的情况下,针对该死角区域bld,仅执行1次第2终端显示处理。同样地,第2终端控制装置12b在针对在相同的死角区域bld存在的多个移动体mb而第2通知条件c2成立的情况下,针对该死角区域bld,仅执行1次第2终端警报处理。
287.另外,第2终端控制装置12b在针对在不同的死角区域bld存在的多个移动体mb而第1通知条件c1成立的情况下,仅针对最近的移动体mb执行第2终端显示处理。同样地,第2终端控制装置12b在针对在不同的死角区域bld存在的多个移动体mb而第2通知条件c2成立的情况下,仅执行1次第2终端警报处理。
288.另外,车辆控制装置12v在针对在相同的死角区域bld存在的多个移动体mb而取得了车辆显示指令信号的情况下,针对该死角区域bld,可以通过车辆显示处理仅显示1个移动体mb,也可以显示2个以上(特别是全部)移动体mb。另外,车辆控制装置12v在针对在相同的死角区域bld存在的多个移动体mb取得了车辆警报指令信号的情况下,针对该死角区域bld,可以仅执行1次第2终端警报处理,也可以执行2次以上(特别是与移动体mb的数量相等的次数)。
289.另外,车辆控制装置12v在针对在不同的死角区域bld存在的多个移动体mb而取得了车辆显示指令信号的情况下,针对车辆显示处理,可以仅显示最近的移动体mb的图像,也可以显示2个以上(特别是全部)的移动体mb的图像。另外,车辆控制装置12v在针对在不同的死角区域bld存在的多个移动体mb取得了车辆警报指令信号的情况下,可以仅执行1次车辆警报处理,也可以执行2次以上(特别是与移动体mb的数量相等的次数)。
290.以上是第2实施方式的移动体检测系统10的工作。由此,第2终端控制装置12b与第1终端控制装置12a之间的通信周期以及第2终端控制装置12b与车辆控制装置12v之间的通信周期在死角条件cbld不成立时,被设定为长周期,在死角条件cbld成立时被设定为短周期。因此,在抑制第2终端10b的电池、第1终端10a的电池以及本车辆10v的电池的耗电量的同时能够高精度地追踪在死角区域bld存在的移动体mb的举动。
291.<第2实施方式的移动体检测系统的具体工作>
292.接着,说明第2实施方式的移动体检测系统10的具体工作。
293.<第2终端控制装置例程>
294.该移动体检测系统10的第2终端控制装置12b构成为每经过预定时间执行图11所示的例程。
295.因此,当到了预定的时机时,第2终端控制装置12b从图11的步骤1100起开始处理,
使该处理进入步骤1105,判定车辆内判定标志xbin的值是否是“1”。车辆内判定标志xbin是表示第2终端10b是否存在于本车辆10v内的标志。
296.车辆内判定标志xbin的值在第2终端控制装置12b判定为第2终端10b存在于本车辆10v内时通过第2终端控制装置12b被设定为“1”,在第2终端控制装置12b判定为第2终端10b不存在于本车辆10v内时通过第2终端控制装置12b被设定为“0”。
297.第2终端控制装置12b在步骤1105中判定为“是”的情况下,使处理进入步骤1110,判定第1终端信号取得标志xbacq的值是否是“1”。第1终端信号取得标志xbacq是表示第2终端控制装置12b是否取得第1终端信号sa的标志。
298.第1终端信号取得标志xbacq的值在第2终端控制装置12b取得了第1终端信号sa时通过第2终端控制装置12b被设定为“1”,在第2终端控制装置12b不再取得第1终端信号sa时通过第2终端控制装置12b被设定为“0”。
299.第2终端控制装置12b在步骤1110中判定为“是”的情况下,使处理进入步骤1113,发送死角区域信息请求信号sreq_bld。
300.接着,第2终端控制装置12b使处理进入步骤1115,判定死角条件成立标志xbbld的值是否是“1”。死角条件成立标志xbbld是表示死角条件cbld是否成立的标志。
301.死角条件成立标志xbbld的值在死角条件cbld成立时通过第2终端控制装置12b被设定为“1”,在死角条件cbld不再成立时通过第2终端控制装置12b被设定为“0”。
302.第2终端控制装置12b在步骤1115中判定为“是”的情况下,使处理进入步骤1120,将其自身的通信周期cyb设定为第2通信周期cy2。即,第2终端控制装置12b将其自身的信号取得周期设定为第2取得周期cy2_r,并且将其自身的信号发送周期设定为第2发送周期cy2_t。
303.接着,第2终端控制装置12b使处理进入步骤1125,发送死角条件成立信号sbld。
304.接着,第2终端控制装置12b使处理进入步骤1130,判定第1通知条件成立标志xb1的值是否是“1”。第1通知条件成立标志xb1是表示第1通知条件c1是否成立的标志。
305.第1通知条件成立标志xb1的值在第1通知条件c1成立时通过第2终端控制装置12b被设定为“1”,在第1通知条件c1不再成立时通过第2终端控制装置12b被设定为“0”。
306.第2终端控制装置12b在步骤1130中判定为“是”的情况下,使处理进入步骤1135,执行第2终端显示处理。由此,在第2终端显示装置15b显示通知图像。接着,第2终端控制装置12b使处理进入步骤1140,发送第1终端显示指令信号sdis_a以及车辆显示指令信号sdis_v。
307.接着,第2终端控制装置12b使处理进入步骤1145,判定第2通知条件成立标志xb2的值是否是“1”。第2通知条件成立标志xb2是表示第2通知条件c2是否成立的标志。
308.第2通知条件成立标志xb2的值在第2通知条件c2成立时通过第2终端控制装置12b被设定为“1”,在第2通知条件c2不再成立时通过第2终端控制装置12b被设定为“0”。
309.第2终端控制装置12b在步骤1145中判定为“是”的情况下,使处理进入步骤1150,执行第2终端警报处理。由此,从第2终端扬声器16b发出通知声。接着,第2终端控制装置12b使处理进入步骤1155,发送第1终端警报指令信号sale_a以及车辆警报指令信号sale_v,接着,使处理进入步骤1195,暂时结束本例程。
310.另一方面,第2终端控制装置12b在步骤1145中判定为“否”的情况下,使处理进入
步骤1170,结束第2终端警报处理,接着,使处理进入步骤1195,暂时结束本例程。
311.另外,第2终端控制装置12b在步骤1130中判定为“否”的情况下,使处理进入步骤1165,结束第2终端显示处理,接着,使处理进入步骤1170,结束第2终端警报处理,接着,使处理进入步骤1195,暂时结束本例程。
312.另外,第2终端控制装置12b在步骤1105或步骤1110或步骤1115中判定为“否”的情况下,使处理进入步骤1160,将其自身的通信周期cyb设定为第1通信周期cy1。即,第2终端控制装置12b将其自身的信号取得周期设定为第1取得周期cy1_r,并且将其自身的信号发送周期设定为第1发送周期cy1_t。
313.接着,第2终端控制装置12b使处理进入步骤1165,结束第2终端显示处理,接着,使处理进入步骤1170,结束第2终端警报处理,接着,使处理进入步骤1195而暂时结束本例程。
314.<第1终端控制装置例程>
315.另外,第2实施方式的第1终端控制装置12a构成为,每经过预定时间执行图12所示的例程。
316.因此,当到了预定的时机时,第1终端控制装置12a从图12的步骤1200起开始处理,使该处理进入步骤1205,判定死角条件成立标志xabld的值是否是“1”。死角条件成立标志xabld是与第1实施方式的死角条件成立标志xabld相同的标志。
317.第1终端控制装置12a在步骤1205中判定为“是”的情况下,使处理进入步骤1210,将其自身的通信周期cya设定为第2通信周期cy2。即,第1终端控制装置12a将其自身的信号取得周期设定为第2取得周期cy2_r,并且将其自身的信号发送周期设定为第2发送周期cy2_t。
318.接着,第1终端控制装置12a使处理进入步骤1215,判定第1终端显示指令标志xadis的值是否是“1”。第1终端显示指令标志xadis是与第1实施方式的第1终端显示指令标志xadis相同的标志。
319.第1终端控制装置12a在步骤1215中判定为“是”的情况下,使处理进入步骤1220,执行第1终端显示处理。由此,在第1终端显示装置15a显示通知图像。
320.接着,第1终端控制装置12a使处理进入步骤1225,判定第1终端警报指令标志xaale的值是否是“1”。第1终端警报指令标志xaale是与第1实施方式的第1终端警报指令标志xaale相同的标志。
321.第1终端控制装置12a在步骤1225中判定为“是”的情况下,使处理进入步骤1230,执行第1终端警报处理。由此,从第1终端扬声器16a发出通知声。接着,第1终端控制装置12a使处理进入步骤1295,暂时结束本例程。
322.另一方面,第1终端控制装置12a在步骤1225中判定为“否”的情况下,使处理进入步骤1245,结束第1终端警报处理,接着,使处理进入步骤1295,暂时结束本例程。
323.另外,第1终端控制装置12a在步骤1215中判定为“否”的情况下,使处理进入步骤1240,结束第1终端显示处理,接着,使处理进入步骤1245,结束第1终端警报处理,接着,使处理进入步骤1295,暂时结束本例程。
324.另外,第1终端控制装置12a在步骤1205中判定为“否”的情况下,使处理进入步骤1235,将其自身的通信周期cya设定为第1通信周期cy1。即,第1终端控制装置12a将其自身的信号取得周期设定为第1取得周期cy1_r,并且将其自身的信号发送周期设定为第1发送
周期cy1_t。
325.接着,第1终端控制装置12a使处理进入步骤1240,结束第1终端显示处理,接着,使处理进入步骤1245,结束第1终端警报处理,接着,使处理进入步骤1295,暂时结束本例程。
326.<车辆控制装置例程>
327.另外,第2实施方式的车辆控制装置12v构成为,每经过预定时间执行图13所示的例程。
328.因此,当到了预定的时机时,车辆控制装置12v从图13的步骤1300起开始处理,使该处理进入步骤1302,判定死角区域信息请求标志xvreq的值是否是“1”。死角区域信息请求标志xvreq是表示是否从第2终端控制装置12b请求了死角区域信息信号sinfo_bld的发送的标志。
329.死角区域信息请求标志xvreq的值,在车辆控制装置12v取得了死角区域信息请求信号sreq_bld时通过车辆控制装置12v被设定为“1”,在车辆控制装置12v不再取得死角区域信息请求信号sreq_bld时通过车辆控制装置12v被设定为“0”。
330.车辆控制装置12v在步骤1302中判定为“是”的情况下,使处理进入步骤1304,发送死角区域信息信号sinfo_bld。
331.接着,车辆控制装置12v使处理进入步骤1305,判定死角条件成立标志xvbld的值是否是“1”。死角条件成立标志xvbld是表示死角条件cbld是否成立的标志。
332.死角条件成立标志xvbld的值在车辆控制装置12v取得了死角条件成立信号sbld时通过车辆控制装置12v被设定为“1”,在车辆控制装置12v不再取得死角条件成立信号sbld时通过车辆控制装置12v被设定为“0”。
333.车辆控制装置12v在步骤1305中判定为“是”的情况下,使处理进入步骤1310,将其自身的通信周期cyv设定为第2通信周期cy2。即,车辆控制装置12v将其自身的信号取得周期设定为第2取得周期cy2_r,并且将其自身的信号发送周期设定为第2发送周期cy2_t。
334.接着,车辆控制装置12v使处理进入步骤1315,判定车辆显示指令标志xvdis的值是否是“1”。车辆显示指令标志xvdis是表示第1通知条件c1是否成立的标志。
335.车辆显示指令标志xvdis的值,在车辆控制装置12v取得车辆显示指令信号sdis_v时通过车辆控制装置12v被设定为“1”,在车辆控制装置12v不再取得车辆显示指令信号sdis_v时通过车辆控制装置12v被设定为“0”。
336.在车辆控制装置12v在步骤1315中判定为“是”的情况下,使处理进入步骤1320,执行车辆显示处理。由此,在车辆显示装置15v显示通知图像。
337.接着,车辆控制装置12v使处理进入步骤1325,判定车辆警报指令标志xvale的值是否是“1”。车辆警报指令标志xvale是表示第2通知条件c2是否成立的标志。
338.车辆警报指令标志xvale的值在车辆控制装置12v取得了车辆警报指令信号sale_v时通过车辆控制装置12v被设定为“1”,在车辆控制装置12v不再取得车辆警报指令信号sale_v时通过车辆控制装置12v被设定为“0”。
339.车辆控制装置12v在步骤1325中判定为“是”的情况下,使处理进入步骤1330,执行车辆警报处理。由此,从车辆扬声器16v发出通知声。接着,车辆控制装置12v使处理进入步骤1395,暂时结束本例程。
340.另一方面,车辆控制装置12v在步骤1325中判定为“否”的情况下,使处理进入步骤
1345,结束车辆警报处理,接着,使处理进入步骤1395,暂时结束本例程。
341.另外,车辆控制装置12v在步骤1320中判定为“否”的情况下,使处理进入步骤1340,结束车辆显示处理,接着,使处理进入步骤1345,结束车辆警报处理,接着,使处理进入步骤1395,暂时结束本例程。
342.另外,车辆控制装置12v在步骤1305或步骤1302中判定为“否”的情况下,使处理进入步骤1335,将其自身的通信周期cyv设定为第1通信周期cy1。即,车辆控制装置12v将其自身的信号取得周期设定为第1取得周期cy1_r,并且将其自身的信号发送周期设定为第1发送周期cy1_t。
343.接着,车辆控制装置12v使处理进入步骤1340,结束车辆显示处理,接着,使处理进入步骤1345,结束车辆警报处理,接着,使处理进入步骤1395,暂时结束本例程。
344.以上是第2实施方式的移动体检测系统10的具体的工作。
345.此外,本发明并不限定于上述实施方式,在本发明的范围内能够采用各种变形例。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。