1.本发明属于智能检测技术领域,具体涉及一种基于人体姿势识别的压力评估方法及压力评估系统。
背景技术:
2.目前,在对卧床病人的护理过程中,皮肤压疮是一个普遍性问题。解决这一问题,通常采用的方法是对病人进行定时翻身,但需要耗费大量的人力。
3.智能护理床的出现,极大的减轻了护理人员的负担。但是,大多数护理床都不能准确的识别人体各部位所受的压力,在预防压疮方面达不到人们预期的效果。
4.因此我们急切需要找到一种更加有效便捷的方法来及时对卧床病人身体各主要身体部位所受的压力进行评估、预警,使智能护理床更加智能完善。
技术实现要素:
5.为了解决现有技术存在的上述问题,本发明提供一种基于人体姿势识别的压力评估方法及压力评估系统,通过对卧床病人所处人体姿势的识别,结合压力传感器的检测数据,能更加准确及时的评估卧床病人各主要身体部位所受的压力,并能够根据压力情况发出预警,有效预防压疮的产生,提高病人舒适度,减轻护理人员工作负担。
6.本发明的目的是通过以下技术方案实现的:
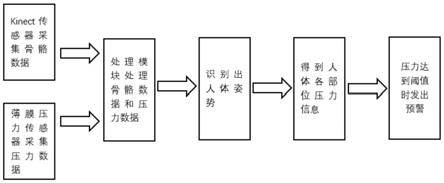
7.本发明提供一种基于人体姿势识别的压力评估方法,包括:
8.步骤一、利用kinect传感器采集人体的原始骨骼数据;
9.步骤二、利用分布在护理床床面上的薄膜压力传感器采集人体各部位的压力数据;
10.步骤三、将原始骨骼数据和压力数据传输到处理器模块进行人体姿势识别,并将骨骼数据、识别出的人体姿势类别以及压力数据传输到压力匹配模块;
11.步骤四、压力匹配模块将骨骼数据与压力数据进行拟合,得到人体相应部位的压力值;
12.步骤五、评估及预警模块结合人体所处的姿势类别及相应部分的压力值进行压力评估,当检测到人体某相应部位的压力及持续时间超过阈值时,进行预警。
13.进一步地,所述kinect传感器捕获人体骨骼三维数据,共获取人体的25个标准骨骼关节点的坐标信息。
14.进一步地,所述薄膜压力传感器分别铺设在护理床床面上对应人体头部、背部、臀部、足部位置;铺设在背部的压力传感器可以用来检测肩关节,铺设在臀部的压力传感器可以检测髋关节,铺设在足部的压力传感器可以用来检测踝关节。
15.进一步地,所述步骤三包括:
16.3.1)对kinect传感器采集到的骨骼关节点进行筛选,提取出与人体姿势识别以及压力数据拟合相关联的11个骨骼关节点坐标;
17.3.2)通过坐标系变换将骨骼关节点坐标变换到以床面为参考的坐标系中,并将坐标变换后的11个骨骼关节点坐标传输到压力匹配模块;
18.3.3)定义骨骼向量,获取每段骨骼向量的方向余弦特征;
19.3.4)通过mlp神经网络对获取的余弦特征进行模型训练,并对所建立的训练模型进行分类识别,分离出人体的姿势类别;
20.3.5)将薄膜压力传感器采集到的压力数据进行均值滤波。
21.更进一步地,所述步骤3.2)中采用的坐标变换公式为:
[0022][0023]
其中,h
rgb
和h
d
是传感器的原有参数,r是旋转矩阵,t是过渡矩阵。
[0024]
更进一步地,所述步骤3.3)的具体过程为:
[0025]
利用公式计算出三个关节点p
i
,p
j
以及p
k
之间的距离d
ij
、d
ik
以及d
jk
,然后利用余弦定理式计算出骨骼点之间的夹角作为余弦特征,一共获得10个余弦特征。
[0026]
更进一步地,所述步骤3.4)的具体过程为:
[0027]
对所需识别的5种人体姿势类别进行定义,分别为:左侧卧,右侧卧,屈腿,起背,平躺;
[0028]
从上述10个余弦特征中选取5个特征作为训练的样本模型,分别为:头部与左肩之间的夹角μ,头部与右肩之间的夹角α,大腿与小腿之间的夹角β,肩部与腿部之间的夹角γ,头部与背部的角度θ;
[0029]
左侧卧姿势通过角度μ识别;右侧卧姿势通过角度α识别;屈腿姿势通过角度β识别;起背姿势通过角度γ识别;平躺姿势通过角度θ识别;
[0030]
通过mlp神经网络对所建立的训练模型进行分类识别,分离出人体的姿势类别。
[0031]
本发明同时提供一种基于人体姿势识别的压力评估系统,包括:
[0032]
信号获取模块,通过kinect传感器采集人体的骨骼数据,通过薄膜压力传感器采集人体各部位压力数据;
[0033]
处理器模块,根据信号获取与处理模块获取的骨骼数据识别出人体当前所处的姿势类别;
[0034]
压力匹配模块,将人体相应部位的骨骼关节点坐标与薄膜压力传感器采集的压力数据进行拟合,获得人体相应部位的压力值;
[0035]
评估及预警模块,检测人体相应受压部位的压力值是否正常,当受压部位压力及持续时间达到阈值时发出警示信号。
[0036]
进一步地,所述信号获取模块包括:
[0037]
kinect传感器,用于采集人体躺着时的骨骼关节点的三维坐标;
[0038]
薄膜压力传感器,采集采集人体各部位压力数据。
[0039]
进一步地,所述处理器模块包括:
[0040]
骨骼坐标处理单元,用于处理kinect传感器采集的骨骼关节点的坐标信息,筛选与薄膜压力传感器匹配所需的骨骼坐标点信息;
[0041]
数据预处理单元,通过所述骨骼坐标点信息得到姿势识别所需要的特征,同时对薄膜压力传感器采集的压力数据进行均值滤波;
[0042]
训练模型建立单元,将所采集的所有人体不同姿势的骨骼信息处理得到的余弦特征作为训练的样本;
[0043]
姿势识别单元,将所有的样本输入至mlp神经网络中进行分类识别,分离出人体的姿势类别。
[0044]
进一步地,所述压力匹配模块将人体各部位的骨骼关节点坐标与处于相应坐标点的薄膜压力传感器相匹配,得出各部位的压力。
[0045]
进一步地,所述评估及预警模块模块包括:
[0046]
异常计算单元,对人体各部位的压力值进行计算,判断压力值是否异常;
[0047]
异常输出单元,当压力值及持续时间达到设定的阈值时,将异常信息输出,即将输出的人体部位压力异常信息转换为警示信号。
[0048]
本发明具有以下有益效果:
[0049]
本发明将kinect传感器技术与薄膜压力传感器技术相结合,通过kinect传感器采集人体骨骼数据,通过薄膜压力传感器采集人体压力数据,然后处理模块通过骨骼数据识别出人体姿势,再通过压力模块将骨骼数据与压力数据进行拟合,获得人体相应部位的压力数据,进行压力评估及预警。能更加准确及时的评估卧床病人各主要身体部位所受的压力,并能够根据压力情况发出预警,有效预防压疮的产生,提高病人舒适度,减轻护理人员工作负担。
附图说明
[0050]
图1为本发明一种基于人体姿势识别的压力评估方法的整体流程图;
[0051]
图2为本发明所述kinect传感器采集的25个标准骨骼关节点示意图;
[0052]
图3为本发明所述用于识别人体姿势的5个角度特征示意图。
具体实施方式
[0053]
下面结合附图和实施例对本发明作进一步的描述。
[0054]
一种基于人体姿势识别的压力评估方法,包括:
[0055]
步骤一、利用kinect传感器采集人体的原始骨骼数据;
[0056]
步骤二、利用分布在护理床床面上的薄膜压力传感器采集人体各部位的压力数据;
[0057]
步骤三、将原始骨骼数据和压力数据传输到处理器模块进行人体姿势识别,并将骨骼数据、识别出的人体姿势类别以及压力数据传输到压力匹配模块;
[0058]
步骤四、压力匹配模块将骨骼数据与压力数据进行拟合,得到人体相应部位的压力值;
[0059]
步骤五、评估及预警模块结合人体所处的姿势类别及相应部分的压力值进行压力评估,当检测到人体某相应部位的压力及持续时间超过阈值时,进行预警。
[0060]
进一步地,所述kinect传感器捕获人体骨骼三维数据,共获取人体的25个标准骨骼关节点的坐标信息。
[0061]
进一步地,所述薄膜压力传感器分别铺设在护理床床面上对应人体头部、背部、臀部、足部位置;铺设在背部的压力传感器可以用来检测肩关节,铺设在臀部的压力传感器可以检测髋关节,铺设在足部的压力传感器可以用来检测踝关节。
[0062]
进一步地,所述步骤三包括:
[0063]
3.1)对kinect传感器采集到的骨骼关节点进行筛选,提取出与人体姿势识别以及压力数据拟合相关联的11个骨骼关节点坐标;
[0064]
3.2)通过坐标系变换将骨骼关节点坐标变换到以床面为参考的坐标系中,并将坐标变换后的11个骨骼关节点坐标传输到压力匹配模块;
[0065]
3.3)定义骨骼向量,获取每段骨骼向量的方向余弦特征;
[0066]
3.4)通过mlp神经网络对获取的余弦特征进行模型训练,并对所建立的训练模型进行分类识别,分离出人体的姿势类别;
[0067]
3.5)将薄膜压力传感器采集到的压力数据进行均值滤波。
[0068]
更进一步地,所述步骤3.2)中采用的坐标变换公式为:
[0069][0070]
其中,h
rgb
和h
d
是传感器的原有参数,r是旋转矩阵,t是过渡矩阵。
[0071]
更进一步地,所述步骤3.3)的具体过程为:
[0072]
利用公式计算出三个关节点p
i
,p
j
以及p
k
之间的距离d
ij
、d
ik
以及d
jk
,然后利用余弦定理式计算出骨骼点之间的夹角作为余弦特征,一共获得10个余弦特征。
[0073]
更进一步地,所述步骤3.4)的具体过程为:
[0074]
对所需识别的5种人体姿势类别进行定义,分别为:左侧卧,右侧卧,屈腿,起背,平躺;
[0075]
从上述10个余弦特征中选取5个特征作为训练的样本模型,分别为:头部与左肩之间的夹角μ,头部与右肩之间的夹角α,大腿与小腿之间的夹角β,肩部与腿部之间的夹角γ,头部与背部的角度θ;
[0076]
左侧卧姿势通过角度μ识别;右侧卧姿势通过角度α识别;屈腿姿势通过角度β识别;起背姿势通过角度γ识别;平躺姿势通过角度θ识别;
[0077]
通过mlp神经网络对所建立的训练模型进行分类识别,分离出人体的姿势类别。
[0078]
实施例1
[0079]
一种基于人体姿势识别的压力评估方法,包括:
[0080]
1、利用kinect传感器和visual studio软件来采集人体的原始骨骼数据;
[0081]
2、利用分布在护理床床面上的压阻式薄膜压力传感器采集人体各部位的压力数据;
[0082]
3、将原始骨骼数据和压力数据传输到处理器模块进行人体姿势识别,并将骨骼数据、识别出的人体姿势类别以及压力数据传输到压力匹配模块;
[0083]
4、压力匹配模块将骨骼数据与压力数据进行拟合,得到人体相应部位的压力值;
[0084]
5、压力匹配模块结合人体所处的姿势类别及相应部分的压力值进行压力评估,当检测到人体某相应部位的压力及持续时间超过阈值时,进行预警。
[0085]
如图2所示,所述步骤1中,kinect传感器和visual studio软件实时准确地捕获人体骨骼三维数据,一共可以获取人体的25个标准骨骼关节点的坐标信息。
[0086]
所述步骤2中,压阻式薄膜压力传感器的铺设方式根据国家技术监督局发布的中国成年人人体尺寸中男子第90百分位标准身高数值为依据进行薄膜压力传感器的铺设。分别在头部、背部、臀部、足部铺设薄膜压力传感器。当人体侧卧时,最容易产生压疮的部位是肩关节,髋关节以及踝关节。此时,铺设在背部的压力传感器可以用来检测肩关节,铺设在臀部的压力传感器可以检测髋关节,铺设在足部的压力传感器可以用来检测踝关节。
[0087]
所述步骤2中,通过stm323f103rct6单片机将压阻式薄膜压力传感器采集的压力数据传输到matlab中进行处理。
[0088]
所述步骤3包括:
[0089]
(1)处理器模块对kinect传感器采集到的25个标准骨骼关节点数据进行处理:对骨骼点的数目进行筛选,选取对人体卧姿识别以及与压力数据拟合相关联的11个坐标点,其分别为:head、spine shoulder、shoulder left、shoulder right、spine base、hip left、hip right、knee left、knee right、ankle left、ankle right;
[0090]
(2)利用公式将采集到的原始骨骼数据进行坐标变换,将骨骼关节点变换到以床面为参考的坐标系中,同时可以去除护理床之外的数据干扰。其中h
rgb
和h
d
是传感器的原有参数,r是旋转矩阵,t是过渡矩阵;将坐标变换后的11个骨骼关节点坐标传输到压力匹配模块;
[0091]
(3)利用公式计算出三个关节点p
i
,p
j
以及p
k
之间的距离d
ij
、d
ik
以及d
jk
,然后利用余弦定理式计算出骨骼点之间的夹角作为余弦特征,一共可以获得10个余弦特征;
[0092]
(4)对所需识别的5种人体姿势类别进行定义,分别为:左侧卧,右侧卧,屈腿,起背,平躺;
[0093]
(5)如图3所示,从上述10个余弦特征中选取5个特征作为训练的样本模型,分别为:头部与左肩之间的夹角μ,头部与右肩之间的夹角α,大腿与小腿之间的夹角β,肩部与腿部之间的夹角γ,头部与背部的角度θ;
[0094]
(6)左侧卧姿势通过角度μ识别;右侧卧姿势通过角度α识别;屈腿姿势通过角度β识别;起背姿势通过角度γ识别;平躺姿势通过角度θ识别;
[0095]
(7)通过mlp神经网络对所建立的训练模型进行分类识别,分离出人体的姿势类别:
[0096]
其中,mlp网络一共有三个完全相连的神经元层和一个输入层。输入层为我们所处理好的5种特征数据集,第一层隐藏层设有10个神经元,与输入层的输入特征完全相连,第二层隐藏层与第一层隐藏层结构相似,但是神经元数目只有8个,输出层为与5种特征相对应的5个神经元组成,该网络使用levenberg
‑
marquardt反向传播算法进行训练,首先使用k倍交叉验证(k=10),然后运用在整个训练集中。在训练集上进行1000次迭代。在训练过程
中,将数据集进行分类,其中70%为训练集,15%为验证集,15%为测试集;
[0097]
(8)对薄膜压力传感器采集的压力数据进行均值滤波,连续取4个采样值进行算术平均运算,滤除随机干扰信号,保持数据平滑性。
[0098]
所述步骤4包括:利用matlab软件将人体骨骼数据与压力数据相拟合,将骨骼点坐标与薄膜压力传感器的铺设坐标进行匹配,根据就近原则,当人体尺寸差距较大时,根据骨骼关节点坐标与位置最近的薄膜压力传感器相匹配,获得人体各主要部位的压力数据。
[0099]
所述步骤5包括:如果人体某部位承受9.33kpa压力的情况持续2h以上,即可发生不可逆损伤。因此当人体某部位压力承受9.33kpa压力的情况下时间过长(超过1小时),判断为人体部位压力信息异常,发出警示信号。
[0100]
实施例2
[0101]
一种基于人体姿势识别的压力评估系统,包括:
[0102]
信号获取模块,通过kinect传感器采集人体的骨骼数据,通过薄膜压力传感器采集人体各部位压力数据;
[0103]
处理器模块,根据信号获取与处理模块获取的骨骼数据识别出人体当前所处的姿势类别;
[0104]
压力匹配模块,将人体相应部位的骨骼关节点坐标与薄膜压力传感器采集的压力数据进行拟合,获得人体相应部位的压力值;
[0105]
评估及预警模块,检测人体相应受压部位的压力值是否正常,当受压部位压力及持续时间达到阈值时发出警示信号。
[0106]
进一步地,所述信号获取模块包括:
[0107]
kinect传感器,用于采集人体躺着时的骨骼关节点的三维坐标;
[0108]
薄膜压力传感器,采集采集人体各部位压力数据。
[0109]
进一步地,所述处理器模块包括:
[0110]
骨骼坐标处理单元,用于处理kinect传感器采集的骨骼关节点的坐标信息,筛选与薄膜压力传感器匹配所需的骨骼坐标点信息;
[0111]
数据预处理单元,通过所述骨骼坐标点信息得到姿势识别所需要的特征,同时对薄膜压力传感器采集的压力数据进行均值滤波;
[0112]
训练模型建立单元,将所采集的所有人体不同姿势的骨骼信息处理得到的余弦特征作为训练的样本;
[0113]
姿势识别单元,将所有的样本输入至mlp神经网络中进行分类识别,分离出人体的姿势类别。
[0114]
进一步地,所述压力匹配模块将人体各部位的骨骼关节点坐标与处于相应坐标点的薄膜压力传感器相匹配,得出各部位的压力。
[0115]
进一步地,所述评估及预警模块包括:
[0116]
异常计算单元,对人体各部位的压力值进行计算,判断压力值是否异常;
[0117]
异常输出单元,当压力值及持续时间达到设定的阈值时,将异常信息输出,即将输出的人体部位压力异常信息转换为警示信号。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。