1.本发明属于智能交通领域,具体涉及一种实时预测突发情况下驾驶人的接管能力的方法。
背景技术:
2.随着驾驶人员非职业化、车辆行驶高速化和交通环境车流密集化等趋势,旨在全面提高汽车行驶安全性能、大幅降低驾驶员操纵负荷的自动驾驶技术成为了国际汽车工程乃至信息科学等相关领域研究的前沿和热点问题。目前的研究主要从自动驾驶接管的影响因素和驾驶人接管绩效展开,并没有相关研究提出以驾驶人状态识别为依据的接管能力评价方法。联合国欧洲经济委员会近期通过的l3级自动驾驶汽车行业标准指出,l3级自动驾驶车辆应配备驾驶人状态识别系统,系统应实时判断驾驶员是否有能力接管驾驶任务。当接管能力较弱时,为保证行车安全,系统应立刻发出特殊警告。
3.目前,l3及以上级别自动驾驶汽车具备v2x(vehicle to everything)功能,可以采集天气、仪表、道路条件、交通状况表等环境信息,并通过比对驾驶人的认知与实际情况,判断情景感知能力。自动驾驶系统可在紧急情况下给出视觉、听觉、触觉的接管警告,并在人工驾驶时采集方向盘转动数据,加速及制动踏板数据等,用以测试反应时间、评价接管绩效。brainlink pro脑电波采集装置可以记录疲劳程度与情绪状况。以上是自动驾驶系统下的驾驶人接管能力预测的基础。
技术实现要素:
4.本发明的目的是为了解决现有自动驾驶普及率不断提高,而自动驾驶汽车事故频发,现有研究对驾驶人关注不足的技术问题,而建立一种驾驶人状态识别系统,预测接管能力,实时显示接管能力等级,促进系统智能化,保障道路交通安全。
5.本发明自动驾驶系统下的驾驶人接管能力预测方法按照以下步骤实现:
6.步骤一、建立三阶段驾驶人接管能力预测系统;
7.该驾驶人接管能力预测系统包括驾驶能力、初始状态和实时状态,其中初始状态通过情景意识测试和驾驶前反应速度测试获得,实时状态包括疲劳指数和情绪状态,并对驾驶能力、初始状态和实时状态进行评分;
8.步骤二、接管绩效评价方法;
9.接管绩效包含警觉度、灵敏度和操作稳定度;其中,警觉度用首次注视时间(t
e
)表征,首次注视时间是指接管请求发出到驾驶员首次注视道路的时间;灵敏度用接管时间(t
h
)表征,接管时间是指接管请求发出到驾驶员将转向盘转动2
°
或踩下10%的刹车踏板所用时间;操作稳定度用接管后车辆速度标准差(s
v
)、加速度标准差(s
a
)、方向盘转角标准差(s
θ
)、横向偏移标准差(s
x
)、逆转率(ssrs)和转向熵(s
e
)共同表征,通过对警觉度、灵敏度和操作稳定度评价,得到驾驶人接管绩效评分;
10.步骤三、构建驾驶人接管能力预测模型;
11.(1)特征指标判别阈值确定
12.驾驶人接管能力预测模型是以驾驶能力、驾驶前反应速度、情景意识、疲劳指数和情绪状态作为驾驶特征指标i对驾驶人的接管能力进行预测,首先从数据库中选取各种(不同)接管能力下的驾驶能力、反应速度、情景意识、疲劳指数与情绪状态对分类预测模型进行训练,获取不同驾驶人接管能力等级k的每个驾驶特征指标i的roc曲线图,计算得到每个驾驶特征指标i在k等级下的判别阈值
13.(2)接管能力等级判定模型
14.①
根据驾驶特征指标i在k等级下的判别阈值从而求得tp
k
、tn
k
、fp
k
和fn
k
,其中tp
k
为k等级下的真正例数量,tn
k
为k等级下的真反例数量,fp
k
为k等级下的假正例数量,fn
k
为k等级下的假反例数量;
15.通过公式(1)计算得到驾驶特征指标i在k等级下的准确率
[0016][0017]
②
roc曲线下面积(auc)是衡量特征指标对不同状态判别能力的重要评价指标,因此,驾驶人接管能力等级k的驾驶特征指标i的综合判别准确度表示为:
[0018][0019]
其中为驾驶特征指标i在k等级下的roc曲线面积;
[0020]
③
根据驾驶人接管能力等级k的驾驶特征指标i的综合判别准确度对驾驶特征指标i的相对权重进行线性分配,公式如下:
[0021][0022]
其中为驾驶特征指标i在k等级下的重要度,为驾驶特征指标i在k等级下所占权重,为驾驶特征指标j在k等级下的重要度,为驾驶特征指标j在k等级下所占权重;
[0023]
④
根据驾驶特征指标i的实际测定值x
i
(即驾驶能力、反应速度、情景意识、疲劳指数与情绪状态的实测值)和等级判定阈值t
i
(该组数据驾驶特征指标i所处等级的下限节点)计算在k等级下驾驶人接管能力综合判定值e
k
,当e
k
>1时,则判定驾驶人接管能力等级为k级,从而预测得到驾驶人的接管能力:
[0024][0025]
步骤四、接管能力等级修正模型
[0026]
对接管能力等级判定模型进行优化修正,将接管能力判定等级和接管绩效对比,采用相似度差值区间r作为驾驶人个性特征信息筛选标准,相似度s计算公式如公式(5)所示,当相似度在r中,则该组数据归入分类预测模型的训练集对模型进行修正;
[0027][0028]
式中:d
vr
为接管能力r级与r 1级的分级节点,d
vr 1
为接管能力r 1级与r 2级的分级节点,t
i
为该组数据驾驶特征指标i所处等级的下限节点,t
i’为该组数据驾驶特征指标i所处等级的上限节点,t
vr
为驾驶人实际接管绩效得分。
[0029]
本发明首先建立三阶段接管能力预测系统,在首次驾驶车辆前测试驾驶能力,在每次自动驾驶系统运行前测试情景意识与反应时间,在自动驾驶系统运行过程中记录疲劳程度、情绪状况;然后,制定接管绩效评价方案,在接管提示发出后以驾驶人的反应情况及接管后车辆的运行情况评价接管绩效,并将每位驾驶人的上述五项指标作为一组数据纳入数据库;其次,建立roc接管能力评级模型,以数据库中的数据特征为基础,以情态感知系统的五项指标为判断依据,评估驾驶人感知能力,实时显示驾驶人接管能力等级;最后,建立模型自学习机制,以接管绩效作为接管能力的评价依据,每次接管任务完成后,提示发出前的五项指标及提示发出后的接管绩效将被纳入个体数据库,用于模型的个性化修正,使后续预测的接管能力级别更接近于驾驶人真实情况。
附图说明
[0030]
图1为实施例步骤二中驾驶人接管绩效评价方法示意图;
[0031]
图2为实施例步骤三中驾驶人接管能力预测模型的构建流程图;
[0032]
图3为实施例步骤三中接管能力等级判定流程图;
[0033]
图4为实施例步骤四中接管能力等级修正模型的流程图。
具体实施方式
[0034]
具体实施方式一:本实施方式自动驾驶系统下的驾驶人接管能力预测方法按照以下步骤实施:
[0035]
步骤一、建立三阶段驾驶人接管能力预测系统;
[0036]
该驾驶人接管能力预测系统包括驾驶能力、初始状态和实时状态,其中初始状态通过情景意识测试和驾驶前反应速度测试获得,实时状态包括疲劳指数和情绪状态,并对驾驶能力、初始状态和实时状态进行评分;
[0037]
步骤二、接管绩效评价方法;
[0038]
接管绩效包含警觉度、灵敏度和操作稳定度;其中,警觉度用首次注视时间(t
e
)表征,首次注视时间是指接管请求发出到驾驶员首次注视道路的时间;灵敏度用接管时间(t
h
)表征,接管时间是指接管请求发出到驾驶员将转向盘转动2
°
或踩下10%的刹车踏板所用时间;操作稳定度用接管后车辆速度标准差(s
v
)、加速度标准差(s
a
)、方向盘转角标准差(s
θ
)、横向偏移标准差(s
x
)、逆转率(ssrs)和转向熵(s
e
)共同表征,通过对警觉度、灵敏度和操作稳定度评价,得到驾驶人接管绩效评分;
[0039]
步骤三、构建驾驶人接管能力预测模型;
[0040]
(1)特征指标判别阈值确定
[0041]
驾驶人接管能力预测模型是以驾驶能力、驾驶前反应速度、情景意识、疲劳指数和情绪状态作为驾驶特征指标i对驾驶人的接管能力进行预测,首先从数据库中选取各种(不
同)接管能力下的驾驶能力、反应速度、情景意识、疲劳指数与情绪状态对分类预测模型进行训练,获取不同驾驶人接管能力等级k的每个驾驶特征指标i的roc曲线图,计算得到每个驾驶特征指标i在k等级下的判别阈值
[0042]
(2)接管能力等级判定模型
[0043]
①
根据驾驶特征指标i在k等级下的判别阈值从而求得tp
k
、tn
k
、fp
k
和fn
k
,其中tp
k
为k等级下的真正例数量,tn
k
为k等级下的真反例数量,fp
k
为k等级下的假正例数量,fn
k
为k等级下的假反例数量;
[0044]
通过公式(1)计算得到驾驶特征指标i在k等级下的准确率
[0045][0046]
②
roc曲线下面积(auc)是衡量特征指标对不同状态判别能力的重要评价指标,因此,驾驶人接管能力等级k的驾驶特征指标i的综合判别准确度表示为:
[0047][0048]
其中为驾驶特征指标i在k等级下的roc曲线面积;
[0049]
③
根据驾驶人接管能力等级k的驾驶特征指标i的综合判别准确度对驾驶特征指标i的相对权重进行线性分配,公式如下:
[0050][0051]
其中为驾驶特征指标i在k等级下的重要度,为驾驶特征指标i在k等级下所占权重,为驾驶特征指标j在k等级下的重要度,为驾驶特征指标j在k等级下所占权重;
[0052]
④
根据驾驶特征指标i的实际测定值x
i
(即驾驶能力、反应速度、情景意识、疲劳指数与情绪状态的实测值)和等级判定阈值t
i
(该组数据驾驶特征指标i所处等级的上线节点)计算在k等级下驾驶人接管能力综合判定值e
k
,当e
k
>1时,则判定驾驶人接管能力等级为k级:
[0053][0054]
步骤四、接管能力等级修正模型
[0055]
对接管能力等级判定模型进行优化修正,将接管能力判定等级和接管绩效对比,采用相似度差值区间r作为驾驶人个性特征信息筛选标准,相似度s计算公式如公式(5)所示,当相似度在r中,则该组数据归入分类预测模型的训练集对模型进行修正;
[0056][0057]
式中:d
vr
为接管能力r级与r 1级的分级节点,d
vr 1
为接管能力r 1级与r 2级的分
级节点,t
i
为该组数据驾驶特征指标i所处等级的下限节点,t
i’为该组数据驾驶特征指标i所处等级的上限节点,t
vr
为驾驶人实际接管绩效得分。
[0058]
本实施方式提出一种自动驾驶系统下的驾驶人接管能力预测方法,可以保证驾驶人的身心状况及感知操作能力在可见、可调、可控的环境中,提升驾驶人接管流畅度与行车稳定性,保障行驶安全。
[0059]
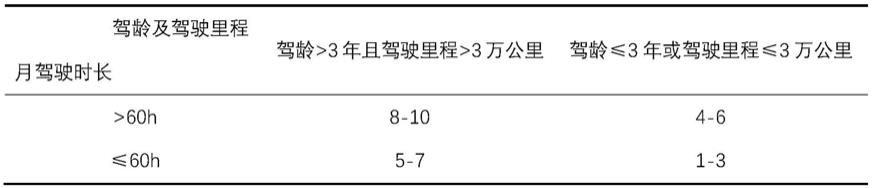
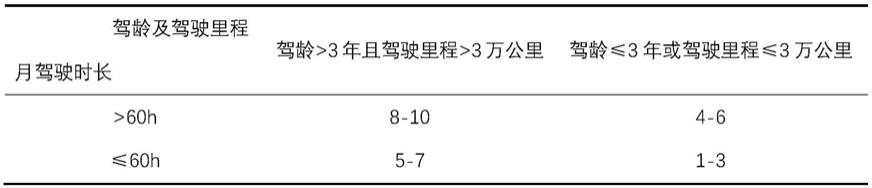
具体实施方式二:本实施方式与具体实施方式一不同的是步骤一中所述的驾驶能力包含驾驶员的基本情况以及驾驶经验,其中驾驶员的基本情况包括年龄、性别、驾驶里程和月驾驶时间(h/月);驾驶经验包含驾驶行为、驾驶技能和危险感知。
[0060]
本实施方式可采用调查问卷的方式来获取驾驶人的驾驶经验。
[0061]
具体实施方式三:本实施方式与具体实施方式一或二不同的是步骤一中所述的驾驶前反应速度测试采用视觉刺激反应时间、听觉刺激反应时间、触觉刺激反应时间综合评价,其中视觉刺激为驾驶人按照视觉提示内容进行加速踏板、制动踏板与方向盘操作所用时间;听觉刺激为驾驶人听到提示音后,调整方向盘,并踩下制动踏板所用时间;触觉刺激为驾驶人感受到方向盘震动后,调整方向盘,并踩下制动踏板所用时间。
[0062]
具体实施方式四:本实施方式与具体实施方式三不同的是反应速度评分中视觉刺激反应占反应速度评分权重的51%,听觉刺激反应占反应速度评分权重的30%,触觉刺激反应占反应速度评分权重的19%。
[0063]
具体实施方式五:本实施方式与具体实施方式一至四之一不同的是步骤一中所述的实时状态通过脑电波采集装置获取。
[0064]
具体实施方式六:本实施方式与具体实施方式一至五之一不同的是步骤二中注视时间通过眼动仪采集。
[0065]
具体实施方式七:本实施方式与具体实施方式一至六之一不同的是步骤二中警觉度占驾驶人接管绩效评分的权重为20%,灵敏度占驾驶人接管绩效评分的权重为30%,接管后车辆速度标准差占驾驶人接管绩效评分的权重为10%,加速度标准差占驾驶人接管绩效评分的权重为10%,方向盘转角标准差占驾驶人接管绩效评分的权重为10%,横向偏移标准差占驾驶人接管绩效评分的权重为10%,逆转率占驾驶人接管绩效评分的权重为5%,转向熵占驾驶人接管绩效评分的权重为5%。
[0066]
具体实施方式八:本实施方式与具体实施方式一至七之一不同的是步骤三中所述的反应速度通过fds驾驶模拟器测试。
[0067]
具体实施方式九:本实施方式与具体实施方式一至八之一不同的是步骤三特征指标判别阈值确定过程中计算阈值是通过寻找每个驾驶特征指标i在等级k下约登指数(tpr
‑
fpr)最大值点,从而得到驾驶特征指标i在k等级下的判别阈值
[0068]
具体实施方式十:本实施方式与具体实施方式一至九之一不同的是步骤四中r的取值为0.8~1.5。
[0069]
实施例:本实施例自动驾驶系统下的驾驶人接管能力预测方法按照以下步骤实施:
[0070]
步骤一、建立三阶段驾驶人接管能力预测系统;
[0071]
该驾驶人接管能力预测系统包括驾驶能力、初始状态和实时状态,其中初始状态
通过情景意识测试和驾驶前反应速度测试获得,实时状态包括疲劳指数和情绪状态;
[0072]
(1)驾驶能力评价
[0073]
基本信息中仅选取驾龄和驾驶里程,具体评分标准见下表:
[0074]
表2
‑
1基本信息评分表
[0075][0076]
基于驾驶经验调查表的驾驶能力评分方法如下:调查表中,驾驶行为6题,危险感知6题,每道题答案为经常获1分,为偶尔获2分,为从不获3分;驾驶技能7题,每道题从完全不能操作到完全能操作为分别为0,1,2,3,4,5分。
[0077]
驾驶经验调查表例题:
[0078]
1、驾驶行为,在行驶过程中是否出现过距离前车太近以至于在紧急情况下造成停车困难?
[0079]
a.经常 b.偶尔 c.从不。
[0080]
2、驾驶技能,在交通繁忙的路况驾驶时,我可以合理的变道?
[0081]
3、危险感知,是否存在以下操作驾驶汽车不打方向灯变换车道?
[0082]
a.经常 b.偶尔 c.从不。
[0083]
对于驾驶经验中的驾驶技能进行加权处理。
[0084][0085]
t2—驾驶技能评分;
[0086]
ti—驾驶技能第i道题的得分。
[0087]
最终的驾驶经验评分t为:
[0088][0089]
t1—驾驶行为评分;
[0090]
t2—驾驶技能评分;
[0091]
t3—危险感知评分。
[0092]
按照上述计算方法计算,驾驶经验调查表的评分满分为60分,终得到的评分结果乘以1/6,标准化为十分制。
[0093]
最终结合基本信息评级表和驾驶经验调查表评级方法进行评级,将两个评分结果取平均值作为最终的评分值。
[0094]
驾驶能力的评级标准如下:
[0095]
表2
‑
2评级结果表
[0096]
[0097]
(2)反应速度测试
[0098]
反应速度测试选用scaner
tm
studio软件结合fds驾驶模拟器,通过电脑显示器显示图形或文字模拟接管过程中的视觉刺激,通过音响模拟汽车中的声音提示,通过方向盘的震动模拟触觉刺激。通过软件内脚本记录刺激发出时间与被实验人动作时间,计算二者时间差为相应的反应时间。
[0099]
视觉刺激为被实验人在看到屏幕上的图文提示后,按照提示内容进行加速踏板、制动踏板与方向盘等相应操作,不同视觉刺激各随机出现一次,共进行三次视觉刺激反应实验;听觉刺激为被实验人听到“嘟嘟”声后,微调方向盘,并踩下制动踏板;触觉刺激为被实验人感受到方向盘震动后,微调方向盘,并踩下制动踏板。每位被实验人共进行5次反应速度测试实验。反应速度测试方案如下表所示:
[0100]
表2
‑
3反应速度测试方案
[0101][0102]
反应速度评分方法如下表所示:
[0103]
表2
‑
4反应速度评分表
[0104][0105][0106]
反应速度评级标准如下:
[0107]
表2
‑
5反应速度评级表
[0108][0109]
(3)情景意识测量
[0110]
驾驶人依据当前场景对随机出现的三个问题做出判断,答题时间超过8min,答题界面自动关闭。实验程序自动记录被试答案及作答时间,评判正误并给出分数。
[0111]
情景意识得分为知觉、理解、预测三道题目的得分与答题时间附加分数的总和。
[0112]
例题如下:
[0113]
1、当前场景的天气状况如何
[0114]
a、优 b、良 c、差
[0115]
2、当前路段允许最高速度为
[0116]
a、20公里/小时 b、30公里/小时 c、40公里/小时 d、50公里/小时
[0117]
3、在这种天气条件下行车如何使用灯光
[0118]
a、使用近光灯 b、不使用灯光 c、使用远光灯 d、使用雾灯
[0119]
具体评分方法见下表:
[0120]
表2
‑
6情景意识评分表
[0121][0122]
表2
‑
7情景意识评级表
[0123][0124]
(4)生理指标检测
[0125]
疲劳程度和情绪状况检测选用brainlink pro脑电波采集装置,针对最主要的δ、θ、α、β、γ等8种脑波进行实时记录与检测。仪器输出的疲劳程度与情绪状况可标准化为十分制,对应评级方法见下表。
[0126]
表2
‑
8疲劳指数评级表
[0127][0128]
表2
‑
9情绪状况评级表
[0129][0130]
步骤二、接管绩效评价方法;
[0131]
接管绩效包含警觉度、灵敏度和操作稳定度;其中,警觉度用首次注视时间(t
e
)表征,首次注视时间是指接管请求发出到驾驶员首次注视道路的时间,首次注视时间(t
e
)由眼动仪采集;灵敏度用接管时间(t
h
)表征,接管时间是指接管请求发出到驾驶员将转向盘转动2
°
或踩下10%的刹车踏板所用时间;操作稳定度用接管后车辆速度标准差(s
v
)、加速度标准差(s
a
)、方向盘转角标准差(s
θ
)、横向偏移标准差(s
x
)、逆转率(ssrs)和转向熵(s
e
)共同表征,接管时间(t
h
)、速度标准差(s
v
)、加速度标准差(s
a
)、方向盘转角标准差(s
θ
)、横向偏移标准差(s
x
)、逆转率(srrs)、转向熵(se)由自动驾驶系统采集,通过对警觉度、灵敏
度和操作稳定度评价,得到驾驶人接管绩效评分;
[0132]
驾驶人接管绩效评分方法如下表所示:
[0133]
表2
‑
10接管能力评分表
[0134][0135]
驾驶人接管绩效评价标准如下表所示:
[0136]
表2
‑
11接管绩效评价表
[0137][0138]
步骤三、构建驾驶人接管能力预测模型;
[0139]
(1)特征指标判别阈值确定
[0140]
驾驶人接管能力预测模型是以驾驶能力、驾驶前反应速度、情景意识、疲劳指数和情绪状态作为驾驶特征指标i对驾驶人的接管能力进行预测,首先从数据库中选取各种(不同)接管能力下的驾驶能力、反应速度、情景意识、疲劳指数与情绪状态对分类预测模型进行训练,获取不同驾驶人接管能力等级k的每个驾驶特征指标i的roc曲线图,计算得到每个驾驶特征指标i在k等级下的判别阈值
[0141]
(2)接管能力等级判定模型
[0142]
①
根据驾驶特征指标i在k等级下的判别阈值从而求得tp
k
、tn
k
、fp
k
和fn
k
,其中tp
k
为k等级下的真正例数量,tn
k
为k等级下的真反例数量,fp
k
为k等级下的假正例数量,fn
k
为k等级下的假反例数量;
[0143]
本实施例将接管绩效划分为特定的四个等级,将各个指标分别划分为待定的四个等级。以疲劳程度在三级下为例:若一组数据疲劳程度为三级,接管绩效同为三级,则该数据归类为真正例tp3,接管绩效不为三级,则该数据归类为假正例fn3;若疲劳程度不为三级,接管绩效同不为三级,则该数据归类为真反例tn3,接管绩效为三级,则该数据归类为假反例fp3[0144]
计算“假正例率”(false positive rate,简称fpr)和“真正例率”(true positive rate,简称tpr)作为横、纵坐标作图,从而得到了“roc曲线”;
[0145][0146]
[0147]
表3
‑
1分类混淆矩阵
[0148][0149]
通过公式(1)计算得到驾驶特征指标i在k等级下的准确率
[0150][0151]
②
roc曲线下面积(auc)是衡量特征指标对不同状态判别能力的重要评价指标,因此,驾驶人接管能力等级k的驾驶特征指标i的综合判别准确度表示为:
[0152][0153]
其中为驾驶特征指标i在k等级下的roc曲线面积;
[0154]
③
根据驾驶人接管能力等级k的驾驶特征指标i的综合判别准确度对驾驶特征指标i的相对权重进行线性分配,公式如下:
[0155][0156]
其中为驾驶特征指标i在k等级下的重要度,为驾驶特征指标i在k等级下所占权重,为驾驶特征指标j在k等级下的重要度,为驾驶特征指标j在k等级下所占权重;
[0157]
④
根据驾驶特征指标i的实际测定值x
i
(即驾驶能力、反应速度、情景意识、疲劳指数与情绪状态的实测值)和等级判定阈值t
i
(该组数据驾驶特征指标i所处等级的上线节点)计算在k等级下驾驶人接管能力综合判定值e
k
,当e
k
>1时,则判定驾驶人接管能力等级为k级,从而预测得到驾驶人的接管能力:
[0158][0159]
步骤四、接管能力等级修正模型
[0160]
对接管能力等级判定模型进行优化修正,将接管能力判定等级和接管绩效对比,采用相似度差值区间r作为驾驶人个性特征信息筛选标准,相似度s计算公式如公式(5)所示,当相似度在r中,则该组数据归入分类预测模型的训练集对模型进行修正;
[0161][0162]
式中:d
vr
为接管能力r级与r 1级的分级节点,d
vr 1
为接管能力r 1级与r 2级的分级节点,t
i’为该组数据驾驶特征指标i所处等级的上限节点,t
vr
为驾驶人实际接管绩效得
分。
[0163]
本实施例邀请46名持有机动车驾驶证一年以上的志愿者参与了模拟驾驶实验,记录本文涉及的五项指标,纳入数据库。其中,接管能力评级为优者12人,为良者21人,为中者8人,为差者5人。
[0164]
应用roc曲线法确定各个接管能力判定等级下驾驶人特征指标判别阈值,并对各个特征指标综合判定权重各个特征指标在不同判定等级下的权重分配如下:
[0165]
表2
‑
12驾驶特征指标权重分配表
[0166][0167]
对权重分配进行横向和纵向对比分析可知,疲劳程度和反应速度为接管能力判别的主要影响因素,驾驶员的疲劳程度对接管绩效影响显著。随着接管能力判定等级的下降,该指标权重分配逐渐增大,对驾驶人的接管能力判定影响更加明显,因此对驾驶人的实时状态监测应予以重视,谨防驾驶人疲劳驾驶。驾驶能力和情景意识综合指标权重分配较小,可见驾驶能力和情景意识对接管能力的判定影响较小。随着接管能力判定等级的下降,二者权重分配逐渐降低,说明在接管能力判定的低等级之间,驾驶能力和情景意识的区分度并不明显。
[0168]
为检验修正模型的有效性,选取1名志愿者三次驾驶的数据为例,通过模拟驾驶实验采取5个特征指标数据,对接管能力等级进行预测并与实际接管绩效评级对比,实验数据如下:
[0169]
表2
‑
13修正模型测试数据
[0170]
[0171][0172]
实验结果表明,随着应用接管能力预测系统的次数增加,模型预测的结果更加接近实际的接管绩效,接管能力等级修正模型是有效的。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。