技术特征:
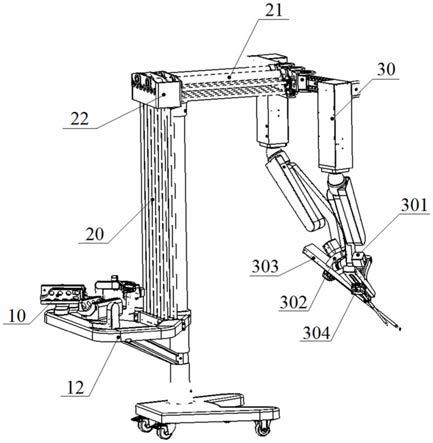
1.一种手术机器人的力反馈传动系统,包括:接收部,所述接收部设置有两个主操作手,每个所述主操作手均设置有多个旋转或水平位移自由度,每个自由度均设置有一组接收驱动钢丝;传动部,所述传动部设置有多个传动轴组,所述传动轴组的数量与两个所述主操作手的自由度数量之和相同,每个所述传动轴组均包括垂直传动轴和水平传动轴,每个所述传动轴组的所述垂直传动轴的第二端与所述水平传动轴的第一端传动连接,每组所述接收驱动钢丝分别与对应的所述垂直传动轴的第一端传动连接;执行部,所述执行部设置有两组机械臂和多组执行驱动钢丝,多组所述执行驱动钢丝分别用于驱动两组所述机械臂的执行机构的运动,多组所述执行驱动钢丝分别与对应的所述水平传动轴的第二端传动连接。2.根据权利要求1所述的手术机器人的力反馈传动系统,其特征在于,所述主操作手设置有手部剪切关节、手腕偏移关节、手腕屈伸关节、前臂旋转关节、前臂翻转关节和手肘屈伸关节逐一连接;所述前臂旋转关节与前臂翻转关节之间设置有所述水平位移驱动装置。3.根据权利要求1所述的手术机器人的力反馈传动系统,其特征在于,所述垂直传动轴的第二端和所述水平传动轴的第一端均设置有传动锥齿轮,所述所述垂直传动轴第二端的传动锥齿轮与所述水平传动轴第一端的传动锥齿轮啮合。4.根据权利要求1所述的手术机器人的力反馈传动系统,其特征在于,所述垂直传动轴的第一端均设置有接收预紧滚轮,每组所述接收驱动钢丝分别绕设在对应的所述接收预紧滚轮上。5.根据权利要求1所述的手术机器人的力反馈传动系统,其特征在于,所述水平传动轴的第二端均设置有执行预紧滚轮,每组所述执行驱动钢丝分别绕设在对应的所述执行预紧滚轮上。6.根据权利要求5所述的手术机器人的力反馈传动系统,其特征在于,所述机械臂的执行机构包括旋转机构、弧形导轨机构、执行器伸缩机构和执行器驱动机构。7.根据权利要求6所述的手术机器人的力反馈传动系统,其特征在于,所述执行驱动钢丝的一端绕设在所述执行预紧滚轮上,另一端与所述旋转机构或弧形导轨机构或执行器伸缩机构或执行器驱动机构传动连接。8.根据权利要求7所述的手术机器人的力反馈传动系统,其特征在于,所述执行驱动钢丝位于所述执行器驱动机构外侧套设有钢丝长度限制弹簧管。9.根据权利要求5所述的手术机器人的力反馈传动系统,其特征在于,所述水平传动轴的第二端设置有安装架,所述安装架的底部开设有多个钢丝长度限位台阶,所述钢丝长度限位台阶内设置有钢丝长度限制弹簧管,所述执行驱动钢丝穿设在所述钢丝长度限制弹簧管内。
技术总结
本发明提供了一种手术机器人的力反馈传动系统,包括:接收部,所述接收部设置有两个主操作手,每个所述主操作手均设置有多个旋转或水平位移自由度,每个自由度均设置有一组接收驱动钢丝;传动部,所述传动部设置有多个传动轴组,所述传动轴组的数量与两个所述主操作手的自由度数量之和相同,每个所述传动轴组均包括垂直传动轴和水平传动轴;执行部,所述执行部设置有两组机械臂和多组执行驱动钢丝,多组所述执行驱动钢丝分别用于驱动两组所述机械臂的执行机构的运动。本发明能够将主操作手的力传递到机械臂的执行机构,实现手术需要的拉伸,剪切,翻转等功能,手术过程中机械臂的执行机构的受力情况能够直接反映到主操作手。机构的受力情况能够直接反映到主操作手。机构的受力情况能够直接反映到主操作手。
技术研发人员:朱晒红 段吉安 王国慧 罗志 凌颢 李洲 李政 易波 朱利勇
受保护的技术使用者:中南大学
技术研发日:2021.10.11
技术公布日:2021/12/7
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。