技术特征:
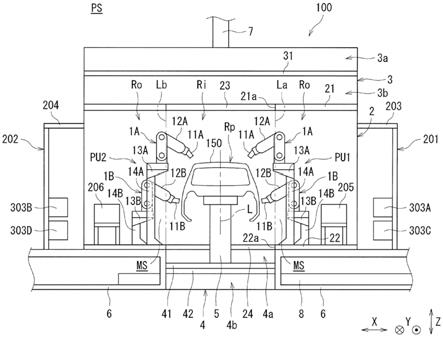
1.一种涂装系统,其特征在于,包括涂装单元,该涂装单元具有:第一涂装机器人,被配置为对被涂装物的上部的区域进行涂装;以及第二涂装机器人,被配置为对所述被涂装物的比所述上部的区域靠下侧的区域进行涂装,其中,所述第一涂装机器人具备:第一机器人基座;以及第一机器人臂,以能运转的方式装配于所述第一机器人基座上,所述第二涂装机器人具备:第二机器人基座;以及第二机器人臂,以能运转的方式装配于所述第二机器人基座上,所述被涂装物与所述涂装单元能沿着水平方向相对地移动,在将沿着所述被涂装物与所述涂装单元的相对移动的方向且在竖直方向延伸的假想平面作为基准面的情况下,所述第一涂装机器人和所述第二涂装机器人相对于所述基准面配置于同一侧,所述第一机器人基座与所述基准面之间的距离被设定为比所述第二机器人基座与所述基准面之间的距离短,所述第一机器人基座的配设高度位置被设定为比所述第二机器人基座的配设高度位置靠上方,在所述第一机器人基座的下侧设有供所述第二机器人臂通过的机器人臂通过范围。2.根据权利要求1所述的涂装系统,其特征在于,还包括单一的控制装置,该单一的控制装置被配置为对所述第一涂装机器人的运转和所述第二涂装机器人的运转均进行控制。3.根据权利要求2所述的涂装系统,其特征在于,还包括涂装间,该涂装间构成容纳所述被涂装物的输送路径和所述涂装单元且与外部隔断的涂装用空间,其中,所述控制装置配设于所述涂装间的外部。4.根据权利要求1~3中任一项所述的涂装系统,其特征在于,所述第一机器人臂和所述第二机器人臂均搭载有被配置为朝向所述被涂装物喷射涂料的喷枪,各所述喷枪中的至少一方被配置为对涂料进行静电微粒化并朝向所述被涂装物喷射该涂料。5.根据权利要求1~4中任一项所述的涂装系统,其特征在于,所述涂装单元隔着所述基准面配设于两侧,相对于所述基准面配设于一侧的所述涂装单元被配置为:所述第一涂装机器人对所述被涂装物的上表面的所述一侧的区域进行涂装,所述第二涂装机器人对所述被涂装物的所述一侧的侧面进行涂装,相对于所述基准面配设于另一侧的所述涂装单元被配置为:所述第一涂装机器人对所述被涂装物的上表面的所述另一侧的区域进行涂装,所述第二涂装机器人对所述被涂装物的所述另一侧的侧面进行涂装。6.根据权利要求1~5中任一项所述的涂装系统,其特征在于,还包括轨道,该轨道被配置为容许所述第一涂装机器人或所述第二涂装机器人沿着所述被涂装物的输送方向移动。
7.根据权利要求1所述的涂装系统,其特征在于,所述涂装系统被配置为从所述第一涂装机器人和所述第二涂装机器人朝向所述被涂装物喷射涂料来对所述被涂装物进行涂装。8.一种涂装方法,使用权利要求1~7中任一项所述的涂装系统,所述涂装方法的特征在于,包括:所述被涂装物与所述涂装单元沿着水平方向相对地移动,并且通过所述第一涂装机器人对所述被涂装物的上部的区域进行涂装;以及通过所述第二涂装机器人对所述被涂装物的比所述上部的区域靠下侧的区域进行涂装。
技术总结
本发明涉及涂装系统以及涂装方法。涂装系统具备涂装单元,该涂装单元具有第一涂装机器人和第二涂装机器人。所述第一涂装机器人具备:第一机器人基座;以及第一机器人臂,以能运转的方式装配于所述第一机器人基座上。所述第二涂装机器人具备:第二机器人基座;以及第二机器人臂,以能运转的方式装配于所述第二机器人基座上。在将沿着被涂装物与所述涂装单元的相对移动的方向且在竖直方向延伸的假想平面作为基准面的情况下,将所述第一机器人基座与基准面之间的距离设定为比所述第二机器人基座与所述基准面之间的距离短,并且在所述第一机器人基座的下侧设有供所述第二机器人臂通过的机器人臂通过范围。过的机器人臂通过范围。过的机器人臂通过范围。
技术研发人员:谷真二 沼里亮 田中一基 木村拓史
受保护的技术使用者:丰田自动车株式会社
技术研发日:2021.05.25
技术公布日:2021/12/7
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。