1.本发明涉及喷涂机器人技术领域,特别涉及一种轻量化的柔性控制臂。
背景技术:
2.喷涂机器人是一种能够半自主或全自主工作的智能化设备。工业喷涂机器人是工业机器人系统中的一个重要组成部分。其特点是通过软件编程实现汽车大规模工业生产任务需要的表面喷涂要求。工业喷涂机器人具有诸多优点,如减少人为操作对汽车产品外观品质的影响、高效高质实现喷涂轨迹运动功能、在喷涂领域避免环境对人体的影响。因此,工业喷涂机器人在国民经济领域中发挥着不可替代的作用,具有广阔的应用前景。根据中国机器人行业报告,2019年中国机器人市场规模达到588.7亿元,其中工业机器人占比66%。
3.现有汽车喷涂机器人常采用国外机器人公司产品(比如abb irb5500喷涂机器人本体)运动精度高,工作可靠,但是售价较高,并且载重比较低(机器人本体质量1180kg,手腕载重13kg)。这些缺点限制了喷涂机器人在国内中小企业的应用。
技术实现要素:
4.发明的目的在于提供一种轻量化的柔性控制臂,解决了现有工业工业机器人成本高、载重比小的问题。
5.本发明是这样实现的,一种轻量化的柔性控制臂,所述柔性控制臂包括固定基座、柔性梁、装置接口、驱动绳索以及动力结构,
6.所述柔性梁一端与所述固定基座固定连接,所述柔性梁另一端与所述装置接口连接,所述驱动绳索置于所述柔性梁两侧且一端与所述装置接口连接,所述驱动绳索另一端与所述动力结构连接,所述装置接口通过所述动力结构拉动驱动绳索实现运动。所述装置接口可根据使用的需要选择不同的安装装置,例如为实现喷涂功能安装喷枪或为实现车身表面质量自动化检测功能安装车身表面质量检测装置。
7.本发明的进一步技术方案是:所述驱动绳索置于所述柔性梁的两侧且上下设置。
8.本发明的进一步技术方案是:置于所述柔性梁同一侧的所述驱动绳索平行或者交叉设置。
9.本发明的进一步技术方案是:所述固定基座上设有连接滑轮,所述驱动绳索远离所述装置接口的一端穿过所述连接滑轮与所述动力结构连接。
10.本发明的进一步技术方案是:所述连接滑轮置于所述固定基座两端且上下设置。
11.本发明的进一步技术方案是:所述动力结构包括驱动电动机以及与所述驱动电动机输出端连接的卷筒,所述驱动绳索远离所述装置接口的一端缠绕在卷筒上。
12.本发明的进一步技术方案是:所述柔性梁上设有安装夹扣。
13.本发明的进一步技术方案是:所述安装夹扣用于安装气管或油漆管。
14.本发明的进一步技术方案是:所述固定基座为框架或者墙板。
15.本发明的进一步技术方案是:所述柔性梁为薄板结构。
16.本发明的有益效果:1.采用柔性梁结构能够有效减少喷涂设备本体的质量,在同等载荷质量要求下,提高喷涂设备的载重比,实现装置的轻量化设计;
17.2.通过控制驱动绳索收放,结合绳索布置特点,实现终端喷涂设备的移动和转动运动要求,同时驱动绳索能够提高柔性梁装置的动态刚度,有效抑制柔性梁终端的振动;
18.3.柔性梁侧面能够设置多个安装夹扣,固定喷涂工艺要求的气管和油漆管路,并保证运动过程中各管路的动态弯曲曲率满足管路工作要求;
19.解决喷涂机器人成本和轻量化问题,为国内企业机器人喷涂需求(特别是汽车喷涂领域)提供了一种新型、安全、轻量化、低成本的装置。
附图说明
20.图1是本发明提供的实施例一中的一种轻量化的柔性控制臂的结构示意图;
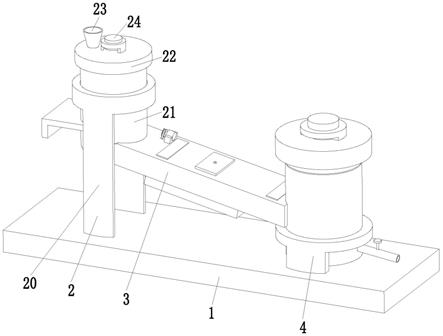
21.图2是本发明提供的实施例二中的一种轻量化的柔性控制臂的结构示意图。
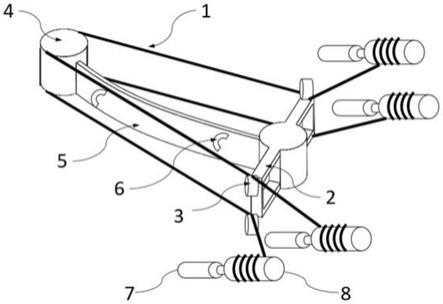
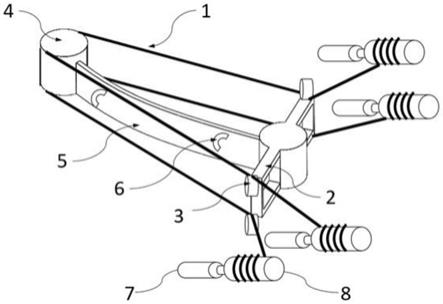
22.附图标记:1.驱动绳索、2.固定基座、3.连接滑轮、4.装置接口、5.柔性梁、6.安装夹扣、7.驱动电动机、8.卷筒。
具体实施方式
23.以下通过特定的具体实例说明本发明的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本发明的其他优点与功效。本发明还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本发明的精神下进行各种修饰或改变。
24.需要说明的是,本说明书所附图式所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技术内容得能涵盖的范围内。同时,本说明书中所引用的如“上”、“下”、“左”、“右”、“中间”及“一”等的用语,亦仅为便于叙述的明了,而非用以限定本发明可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本发明可实施的范畴。
25.实施例一:
26.本实施例中提供如图1所示的一种轻量化的柔性控制臂,所述柔性控制臂包括固定基座2、柔性梁5、装置接口4、驱动绳索1以及动力结构,
27.所述柔性梁5一端与所述固定基座2固定连接,所述柔性梁5另一端与所述装置接口4连接,所述驱动绳索1置于所述柔性梁5两侧且一端与所述装置接口4连接,所述驱动绳索1另一端与所述动力结构连接,所述装置接口4通过所述动力结构拉动驱动绳索1实现运动。
28.所述驱动绳索1置于所述柔性梁5的两侧且上下设置。有利于通过驱动绳索驱动柔性梁运动时的稳定性,保证置于装置接口上的装置能平稳的运行。
29.置于所述柔性梁5同一侧的所述驱动绳索1平行设置。使得装置接口上安装的装置可以在平面上移动,满足平面上平移的工作需要,稳定性好。
30.所述固定基座2上设有连接滑轮3,所述驱动绳索1远离所述装置接口4的一端穿过所述连接滑轮3与所述动力结构连接。穿过连接滑轮能保证在驱动绳索运动过程装置接口上安装的装置的稳定性且在驱动绳索拉动装置接口的过程中能有效的节约能耗。
31.所述连接滑轮3置于所述固定基座2两端且上下设置。同一侧的连接滑轮之间的距离与装置接口的高度配合,使得连接装置接口与连接滑轮的驱动绳索能设置成平行的状态,保证安装在装置接口上的装置能在平面上平移。
32.所述动力结构包括驱动电动机7以及与所述驱动电动机7输出端连接的卷筒8,所述驱动绳索1远离所述装置接口4的一端缠绕在卷筒8上。
33.所述柔性梁5上设有安装夹扣。
34.所述安装夹扣用于安装气管或油漆管。
35.所述固定基座2为框架或者墙板。
36.所述柔性梁5为薄板结构。使得柔性梁具有一定的柔性,能够有效减少喷涂设备本体的质量,在同等载荷质量要求下,提高喷涂设备的载重比,实现装置的轻量化设计。
37.本实施例的工作原理:如图1所示的一种轻量化柔性控制臂,驱动绳索1通过连接滑轮3与安装接口4连接,安装接口4上安装喷涂装置,驱动电动机7根据运动轨迹要求驱动同一侧的卷筒8同时转动,从而控制两侧卷筒8上驱动绳索1的收放长度,使得安装在安装接口4上的喷涂装置平移,实现不同的喷涂运动轨迹要求。
38.实施例二:
39.本实施例中提供如图2所示的一种轻量化的柔性控制臂,所述柔性控制臂包括固定基座2、柔性梁5、装置接口4、驱动绳索1以及动力结构,
40.所述柔性梁5一端与所述固定基座2固定连接,所述柔性梁5另一端与所述装置接口4连接,所述驱动绳索1置于所述柔性梁5两侧且一端与所述装置接口4连接,所述驱动绳索1另一端与所述动力结构连接,所述装置接口4通过所述动力结构拉动驱动绳索1实现运动。
41.所述驱动绳索1置于所述柔性梁5的两侧且上下设置。有利于通过驱动绳索驱动柔性梁运动时的稳定性,保证置于装置接口上的装置能平稳的运行。
42.置于所述柔性梁5同一侧的所述驱动绳索1交叉设置。使得装置接口上安装的装置可以沿着柔性梁的长度方向翻转一定角度,满足旋转角度的需要,同时稳定性好。
43.所述固定基座2上设有连接滑轮3,所述驱动绳索1远离所述装置接口4的一端穿过所述连接滑轮3与所述动力结构连接。穿过连接滑轮能保证在驱动绳索运动过程装置接口上安装的装置的稳定性且在驱动绳索拉动装置接口的过程中能有效的节约能耗。
44.所述连接滑轮3置于所述固定基座2两端且上下设置。
45.所述动力结构包括驱动电动机7以及与所述驱动电动机7输出端连接的卷筒8,所述驱动绳索1远离所述装置接口4的一端缠绕在卷筒8上。
46.所述柔性梁5上设有安装夹扣。
47.所述安装夹扣用于安装气管或油漆管。
48.所述固定基座2为框架或者墙板。
49.所述柔性梁5为薄板结构。使得柔性梁具有一定的柔性,能够有效减少喷涂设备本体的质量,在同等载荷质量要求下,提高喷涂设备的载重比,实现装置的轻量化设计。
50.本实施例的工作原理:如图2所示的一种轻量化柔性控制臂,驱动绳索1通过连接滑轮3与安装接口4连接,安装接口4上安装喷涂装置,驱动电动机7根据运动轨迹要求驱动卷筒8转动,通过控制四根驱动绳索1长度,使得安装在安装接口4上的喷涂装置旋转,实现喷涂装置的转动运动要求。
51.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。