技术特征:
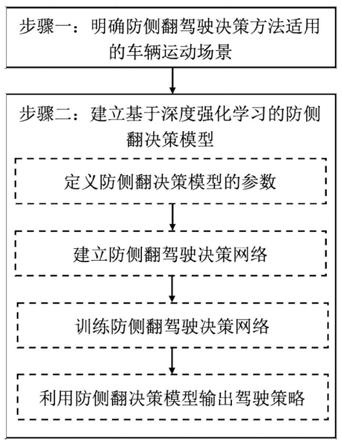
1.一种考虑路面附着条件的大型营运车辆防侧翻决策方法,其特征在于:该方法包括如下步骤:步骤一:明确防侧翻驾驶决策方法适用的车辆运动场景其适用的运动场景为:具备车路通信功能的大型营运车辆在高等级公路上行驶,路面存在潮湿和/或积水和/或积雪情况,车辆的前方存在其他交通参与者;交叉口的龙门架、道路两侧设有路侧单元,路侧单元以10赫兹的频率向车辆发送道路状况信息,包括:路面附着系数信息、道路曲率信息、纵向坡度信息、横向坡度信息、车道限制信息和速度限制信息;当车辆进行制动、车道变换或经过弯道时,应为驾驶员提供包括制动减速、转向的驾驶策略,以避免侧翻事故的发生;步骤二:建立基于深度强化学习的防侧翻决策模型综合考虑路面条件、行驶工况对车辆侧翻的影响,采用双延迟深度确定性策略梯度算法建立防侧翻驾驶决策模型,具体包括以下4个子步骤:子步骤1:定义防侧翻决策模型的参数首先,将最优驾驶决策问题规范化为一个马尔科夫决策过程(s
t
,a
t
,p
t
,r
t
),并对模型的基础参数进行定义:t时刻的状态空间s
t
、t 1时刻的状态空间s
t 1
、t时刻的防侧翻动作决策a
t
、t时刻的状态转移概率p
t
以及t时刻的奖励函数r
t
,其次,对马尔科夫决策过程的基础参数进行定义,具体地:(1)定义状态空间为:s
t
=[p
lon
,p
lat
,v
lon
,v
lat
,a
lon
,a
lat
,θ
str
,β,μ,ρ,α
lon
,α
lat
]
ꢀꢀꢀꢀ
(1)式中,s
t
为t时刻的状态空间,p
lon
,p
lat
分别表示车辆的纵向位置和横向位置,单位均为米,v
lon
,v
lat
分别表示车辆的纵向速度和侧向速度,单位均为米每秒,通过安装在车辆质心处的厘米级高精度差分gps测量获得;a
lon
,a
lat
分别表示车辆的纵向加速度和侧向加速度,单位均为米每二次方秒,β为车辆的侧倾角,单位为度,通过安装在车辆底盘中心的mems陀螺仪测量获得;θ
str
为车辆的方向盘转角,单位为度,通过can总线获得;μ为路面附着系数,ρ为道路曲率,单位为米的负一次方,α
lon
,α
lat
分别表示纵向坡度、横向坡度,单位为度,通过与路侧单位信息交互获得;(2)定义动作空间为:a
t
=[θ
str
,δ]
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)式中,θ
str
为归一化后的方向盘转角控制量,范围为[
‑
1,1],当θ
str
>0时,表示车辆向左转向,当θ
str
<0时,表示车辆向右转向,δ表示节气门/制动踏板开度控制量,单位为百分数,范围为[
‑
1,1],当δ>0时,表示车辆通过控制节气门开度进行加速,当δ<0时,表示车辆通过控制制动踏板开度进行减速;(3)定义奖励函数为:r
t
=r1 r2 r3 r4 r5ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)式中,r
t
为t时刻的奖励函数,r1为防侧翻奖励函数,r2为安全距离奖励函数,r3为急动度奖励函数,r4为速度奖励函数,r5为惩罚函数;设计与侧向加速度、侧倾角相关的防侧翻奖励函数r1:r1=
‑
ω1·
(β
thr
‑
β)
‑
ω2·
(a
lat_thr
‑
a
lat
)
ꢀꢀꢀꢀꢀ
(4)
式中,β
thr
为车辆的侧倾角阈值,a
lat_thr
为车辆的侧向加速度阈值,ω1,ω2为表示防侧翻奖励函数的权重系数;设计自适应路面条件的安全距离奖励函数r2:式中,d
f
表示营运车辆与前方车辆的相对距离,ω3为安全距离奖励函数的权重系数;前方车辆是指位于营运车辆行驶道路前方,且位于同一车道线内、行驶方向相同、距离最近的车辆;设计急动度奖励函数r3:式中,为车辆的纵向急动度,可通过纵向位置对时间求三阶导数获得,ω4为急动度奖励函数的权重系数;设计速度奖励函数r4:式中,v
thr
为道路限速值,单位为千米每小时,可通过与路侧单位信息交互获得,ω5为速度奖励函数的权重系数;最后,为了避免决策策略出现错误动作,设计惩罚函数r5:子步骤2:建立防侧翻驾驶决策网络利用演员
‑
评论家架构搭建防侧翻驾驶决策网络,包括演员网络和评论家网络两部分;其中,演员网络将状态空间信息作为输入,输出驾驶决策,即动作空间;评论家网络将状态空间信息和驾驶决策作为输入,输出当前“状态
‑
动作”的价值;首先,利用全连接神经网络建立演员网络;将状态空间s
t
依次与全连接层f1、全连接层f2、全连接层f3相连,得到输出动作空间a
t
;其次,利用多个隐藏层结构的神经网络建立评论家网络;首先,将状态空间s
t
输入到隐藏层f4中;同时,将动作决策a
t
输入到隐藏层f5中;其次,隐藏层f4和f5通过张量相加的方式进行合并;最后,依次通过全连接层f6和f7后,输出用于策略梯度计算的q值;其中,设置全连接层f1,f2,f3,f4,f5,f6,f7的神经元数量分别为12、50、50、12、2、50、50;各全连接层的激活函数为sigmoid函数,其表达式为子步骤3:训练防侧翻驾驶决策网络训练防侧翻驾驶决策网络,并对网络参数进行迭代更新,在训练过程中,若车辆发生侧翻或碰撞事故,则终止当前回合并开始新的回合进行训练;当迭代达到最大步数或损失值小于给定阈值时,训练结束;子步骤4:利用防侧翻驾驶决策模型输出驾驶决策
将状态空间中的各参数输入到训练后的防侧翻驾驶决策模型中,实时输出节气门/制动踏板开度、方向盘转角控制量,为驾驶员提供精确量化的防侧翻驾驶建议。
技术总结
本发明公开了一种考虑路面附着条件的大型营运车辆防侧翻决策方法。本发明采用双延迟深度确定性策略梯度算法建立防侧翻驾驶决策模型,具体包括以下4个子步骤:子步骤1:定义防侧翻决策模型的参数;子步骤2:建立防侧翻驾驶决策网络;子步骤3:训练防侧翻驾驶决策网络;子步骤4:利用防侧翻驾驶决策模型输出驾驶决策。本发明提出的方法,能够适应干燥、湿滑、结冰等不同的路面条件,为驾驶员提供节气门开度、方向盘转角控制量等精确量化的防侧翻驾驶策略,克服了现有的大型营运车辆防侧翻驾驶方法缺乏路面条件适应性和准确性的不足。法缺乏路面条件适应性和准确性的不足。法缺乏路面条件适应性和准确性的不足。
技术研发人员:李旭 胡玮明 胡锦超 胡悦 徐启敏
受保护的技术使用者:东南大学
技术研发日:2021.10.21
技术公布日:2021/12/6
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。