一种基于ndvi的作物雷达信号入射角归一化方法
技术领域
1.本发明属于雷达数据处理技术领域,具体涉及一种基于ndvi的作物雷达信号入射角归一化方法。
背景技术:
2.合成孔径雷达数据通常用于土地覆盖分类、目标探测和地表参数反演(叶面积指数、雪水当量和土壤湿度)。然而,雷达后向散射系数(σ0)随入射角(θ)而变化,表现出显著的入射角效应。这种入射角效应会降低基于变化检测的作物分类和土壤水分估计的准确性。为了降低入射角效应,就需要对入射角进行归一化处理。
3.余弦方法是广泛使用的归一化方法之一,现有技术中,余弦方法采用固定的n(n=0,1,2)。但研究已经证明,雷达参数(极化)、土地覆盖类型和作物生长阶段是影响σ0对θ依赖性的重要因素。作物不同生长阶段的植被结构和植被含水量会影响后向散射系数,这导致σ0的角度依赖性随作物生长阶段而变化。并且,σ0对θ的依赖性在农田中变化很大,但在永久植被中变化很小。故固定的n值不能满足不同作物类型在不同生长阶段的雷达入射角归一化需求。
技术实现要素:
4.本发明的目的是为了解决现有技术中,余弦归一化方法不能满足不同作物不同生长阶段下雷达入射角的归一化要求的问题,提供一种基于ndvi的作物雷达信号入射角归一化方法。
5.本发明解决上述技术问题采取的技术方案如下。
6.一种基于ndvi的作物雷达信号入射角归一化方法,步骤如下:
7.步骤一、确定待分析作物生长区域的经纬度坐标;
8.步骤二、根据待分析作物生长区域的经纬度坐标,从sentinel数据分发网站提取待分析作物在一个生长周期内的全部雷达数据sentinel
‑
1和全部光学数据sentinel
‑
2;雷达数据sentinel
‑
1包括数据和angle数据,光学数据sentinel
‑
2包括red数据和nir数据;
9.步骤三、先根据每个记录点的red数据和nir数据,利用归一化植被指数计算公式计算该记录点的归一化植被指数ndvi,然后将计算得到的ndvi进行s
‑
g滤波,生成与雷达数据sentinel
‑
1日期相匹配的ndvi数据,最后,以为angle为θ,代入到余弦归一化方法计算公式,利用最小二乘拟合求解n值,进而得到待分析作物在一个生长周期内每个记录点的n值;
10.所述归一化植被指数计算公式如下:
11.ndvi=(nir
‑
red)/(nir red);
12.所述余弦归一化方法计算公式如下;
[0013][0014]
式中,θ代表入射角角度,代表该入射角下的雷达后向散射系数,θ
norm
代表校正后的入射角角度,代表校正后的雷达后向散射系数;
[0015]
步骤四、构建n与ndvi的相关性模型,构建模型种类如下:
[0016]
n=a*ndvi b;
[0017]
n=a*ndvi2 b*ndvi c;
[0018]
n=a*ln(ndvi) b;
[0019]
n=a*e
b*ndvi
;
[0020]
式中,a、b、c均为系数;
[0021]
比较上述不同种类模型的相关系数,将相关系数最大的模型确定为n与ndvi的相关性模型;
[0022]
步骤五、将确定的n与ndvi的相关性模型,代入余弦归一化方法计算公式,得到基于ndvi的作物雷达信号入射角归一化方法。
[0023]
进一步的,所述待分析作物为玉米、大豆或水稻。
[0024]
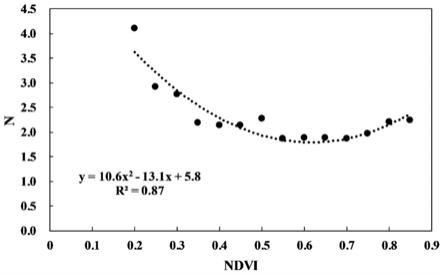
进一步的,所述待分析作物为玉米,n与ndvi的相关性模型为,n=10.6*ndvi2‑
13.1*ndvi 5.8,式中,r2=0.87。
[0025]
进一步的,所述待分析作物为大豆,n与ndvi的相关性模型为,n=7.09*ndvi2‑
8.54*ndvi 4.34,式中,r2=0.59;
[0026]
进一步的,所述待分析作物为水稻,n与ndvi的相关性模型为,n=19.37*ndvi2‑
19.55*ndvi 5.6,式中,r2=0.83。
[0027]
与现有技术相比,本发明的有益效果为:
[0028]
在农业领域,σ0对θ的依赖性主要受作物类型和作物生长阶段的影响,本发明的基于ndvi的作物雷达信号入射角归一化方法,为了减少归一化σ0的误差,使用代表作物生长阶段变化的ndvi(归一化差异植被指数)来量化雷达信号的角度灵敏度;即通过n与ndvi的相关性模型,确定了一种新的估算不同作物在不同生长阶段下雷达入射角归一化的方法,即只需获得特定作物的ndvi,就可以通过该模型计算出该阶段下动态余弦归一化方法的n值,从而获得特定作物在特定生长阶段下去除雷达入射角效应的后向散射数据。提高了雷达数据在地物分类、目标检测和地表参数反演中的能力。
附图说明
[0029]
为了更清楚地说明本发明的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图。
[0030]
图1是本发明实施例1
‑
3黑龙江省典型作物(玉米、大豆、水稻)采样点分布图;
[0031]
图2是本发明实施例1中n和玉米ndvi的相关性分析图;
[0032]
图3是本发明实施例2中n和大豆ndvi的相关性分析图;
[0033]
图4是本发明实施例2中n和水稻ndvi的相关性分析图。
具体实施方式
[0034]
为了进一步了解本发明,下面结合具体实施方式对本发明的优选实施方案进行描述,但是应当理解,这些描述只是为进一步说明本发明的特征和优点而不是对本发明专利要求的限制。
[0035]
本发明的一种基于ndvi的作物雷达信号入射角归一化方法,步骤如下:
[0036]
步骤一、确定待分析作物生长区域的经纬度坐标,可以是一个独立的区域,也可以是多个区域的组合,只要是单一作物即可;
[0037]
步骤二、sentinel
‑
1卫星系统每隔一段时间采集地表雷达数据sentinel
‑
1,sentinel
‑
2卫星系统同时每隔一段时间采集地表光学数据sentinel
‑
2;通常采集地表雷达数据sentinel
‑
1和采集地表光学数据sentinel
‑
2的时间不同,比如可能第一天采集雷达数据sentinel
‑
1,第二天采集光学数据sentinel
‑
2,然后sentinel
‑
1是六天一个间隔循环采集,sentinel
‑
2是五天一个间隔循环采集;
[0038]
步骤三、根据待分析作物生长区域的经纬度坐标,从sentinel数据分发网站(欧空局)提取待分析作物在一个生长周期内的全部雷达数据sentinel
‑
1和全部光学数据sentinel
‑
2;雷达数据sentinel
‑
1包括数据和angle数据,光学数据sentinel
‑
2包括red数据和nir数据;作物的一个生长周期从裸土期开始,包括生长期、茂盛期、衰退期,然后重新回到裸土期;
[0039]
步骤四、先根据每个记录点的red数据和nir数据,利用归一化植被指数计算公式计算该记录点的归一化植被指数ndvi,然后将计算得到的ndvi进行s
‑
g滤波,生成与雷达数据sentinel
‑
1日期相匹配的ndvi数据,最后,以为angle为θ,代入到余弦归一化方法计算公式,利用最小二乘拟合求解n值,进而得到待分析作物在一个生长周期内每个记录点的n值;
[0040]
上述归一化植被指数计算公式如下:
[0041]
ndvi=(nir
‑
red)/(nir red);
[0042]
上述余弦归一化方法计算公式如下;
[0043][0044]
式中,θ代表入射角角度,代表该入射角下的雷达后向散射系数,θ
norm
代表校正后的入射角角度,代表校正后的雷达后向散射系数;
[0045]
步骤五、构建n与ndvi的相关性模型,构建模型种类如下:
[0046]
n=a*ndvi b;
[0047]
n=a*ndvi2 b*ndvi c;
[0048]
n=a*ln(ndvi) b;
[0049]
n=a*e
b*ndvi
;
[0050]
式中,a、b、c均为系数;
[0051]
比较上述不同种类模型的相关系数,将相关系数最大的模型确定为n与ndvi的相关性模型;
[0052]
步骤六、将确定的n与ndvi的相关性模型,代入余弦归一化方法计算公式,得到基于ndvi的作物雷达信号入射角归一化方法。
[0053]
上述技术方案中,待分析作物没有特殊限制,理论上适用于各类作物,如为玉米、大豆或水稻。
[0054]
上述技术方案中,待分析作物为玉米,n与ndvi的相关性模型为,n=10.6*ndvi2‑
13.1*ndvi 5.8,式中,r2=0.87。
[0055]
上述技术方案中,待分析作物为大豆,n与ndvi的相关性模型为,n=7.09*ndvi2‑
8.54*ndvi 4.34,式中,r2=0.59。
[0056]
上述技术方案中,待分析作物为水稻,n与ndvi的相关性模型为,n=19.37*ndvi2‑
19.55*ndvi 5.6,式中,r2=0.83。
[0057]
在本发明中所使用的术语,一般具有本领域普通技术人员通常理解的含义,除非另有说明。
[0058]
为了使本领域的技术人员更好地理解本发明的技术方案,下面将结合实施例对本发明作进一步的详细介绍。
[0059]
在以下实施例中,未详细描述的各种过程和方法是本领域中公知的常规方法。下述实施例中所用的材料、试剂、装置、仪器、设备等,如无特殊说明,均可从商业途径获得。
[0060]
以下结合附图1
‑
4进一步说明本发明。
[0061]
实施例1
[0062]
步骤一、在黑龙江省采集玉米作物的经纬度坐标信息,如图1所示,玉米采样点为1457个;
[0063]
步骤二、根据经纬度坐标,分别获取2018年5月1日至2018年10月31日(玉米的一个完整生长期)欧空局sentinel数据分发网站的sentinel
‑
1(angle)和sentinel
‑
2数据(band4
‑
red、band8
‑
nir);
[0064]
步骤三、根据获取的每个记录点的red数据、nir数据计算归一化植被指数ndvi,其计算公式如下:
[0065]
ndvi=(nir
‑
red)/(nir red)
[0066]
将计算得到的ndvi进行s
‑
g滤波,生成与sentinel
‑
1日期相匹配的ndvi数据;
[0067]
将angle数据代入到余弦归一化方法,利用最小二乘拟合求解余弦归一化方法中n值,进而获得每个记录点的n值;
[0068]
余弦归一化方法计算公式如下:
[0069][0070]
式中,θ代表入射角角度,代表该入射角下的雷达后向散射系数,θ
norm
代表校正后的入射角角度,代表校正后的雷达后向散射系数;
[0071]
步骤四、构建n与ndvi的相关性模型:
[0072]
线性模型:n=
‑
1.9*ndvi 3.3,其中r2=0.45;
[0073]
对数模型:n=
‑
1.1*ln(ndvi) 1.5,其中r2=0.62;
[0074]
指数模型:n=3.8*exp(
‑
0.98*ndvi),其中r2=0.52;
[0075]
二次多项式模型:n=10.6*ndvi2‑
13.1*ndvi 5.8,其中r2=0.87;
[0076]
比较上述不同种类模型的相关系数,二次多项式模型的相关系数最大,故选择二次多项式模型作为n与ndvi的相关性模型;
[0077]
步骤五、将n值与ndvi的二次多项式模型,代入余弦归一化方法计算公式,得到基于ndvi的作物雷达信号入射角归一化方法。
[0078]
实施例2
[0079]
将实施例1中的玉米替换为大豆,如图1所示,大豆采样点为707个;
[0080]
步骤四中,确定n与ndvi的相关性模型为:n=7.09*ndvi2‑
8.54*ndvi 4.34,其中,r2=0.59。
[0081]
实施例3
[0082]
将实施例1中的玉米替换为水稻,如图1所示,水稻采样点为846个;
[0083]
步骤四中,确定n与ndvi的相关性模型为:n=19.37*ndvi2‑
19.55*ndvi 5.6,其中,r2=0.83。
[0084]
本发明的采样点遍布我国黑龙江省,以黑龙江省的玉米、大豆和水稻三种作物为例,研究σ0与θ的关系,建立一种适用于不同作物不同生长阶段的σ0通用入射角归一化方法,提高了雷达数据在地物分类、目标检测和地表参数反演中的能力。
[0085]
对所公开的实施例的上述说明,使本领域专业技术人员能够实现和使用本发明。对这些实施例的多重修改对本领域技术人员来说将是显而易见的,本文中所定义的一般原理可在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例施方式,而是要符合本文所公开的原理和新颖特点相一致的最宽的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。