1.本发明是关于半导体影像量测方法,且特别是关于一种人工智能辨识的半导体影像量测方法。
背景技术:
2.随着产品尺寸缩小化的趋势影响,半导体影像的尺寸量测的速度以及精准度已是目前样品分析从业者所面临的重大课题。目前,样品分析从业者对于半导体影像的尺寸量测大多仍采用人工进行尺寸量测,对于具有各式各样结构设计的半导体而言,利用人工进行尺寸量测,无法快速提供半导体影像尺寸量测服务。鉴于此,一种可提供快速且精准的人工智能辨识的半导体影像量测方法一直是本领域从业者所殷切期盼的。
技术实现要素:
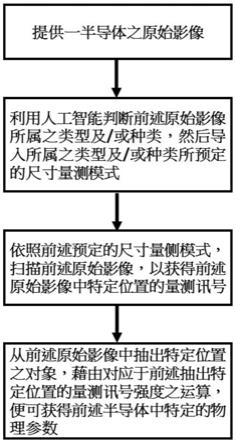
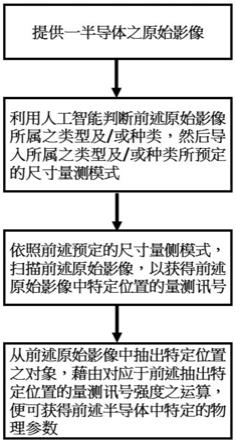
3.本发明揭示一种人工智能辨识的半导体影像量测方法,其包括以下步骤:提供半导体的原始影像;利用人工智能判断前述原始影像所属的类型和/或种类;导入前述原始影像所属的类型和/或种类所预定的尺寸量测模式,并依照前述预定的尺寸量测模式,扫描前述原始影像,以获得前述原始影像的测量信号;以及从前述原始影像中抽出特定位置的对象,通过对应于前述抽出特定位置的对象的测量信号强度的运算以获得前述半导体中特定的物理参数。
4.如上所述的人工智能辨识的半导体影像量测方法,前述半导体的原始影像是由扫描式电子显微镜(sem)、穿透式电子显微镜(tem)、原子力显微镜(afm)、聚焦离子束显微镜(fib)、以及x-光绕射结晶分析仪所构成族群其中之一所拍摄提供。
5.如上所述的人工智能辨识的半导体影像量测方法,前述特定位置为为前述原始影像中的指定结构处、指定高度、指定距离、指定50%高度、最小处、最大处、最底部、最顶部。
6.如上所述的人工智能辨识的半导体影像量测方法,前述特定的物理参数为前述半导体中特定层的厚度、宽度、厚度平均值、宽度平均值、厚度标准偏差、宽度标准偏差、厚度方均根、宽度方均根其中之一或其组合,和/或前述半导体中特定位置的长度、宽度、高度、间距、夹角、弧长其中之一或其组合。
7.如上所述的人工智能辨识的半导体影像量测方法,前述测量信号强度的运算为强度差运算、积分差运算或微分差运算。
8.如上所述的人工智能辨识的半导体影像量测方法,前述利用人工智能判断前述原始影像所属的类型和/或种类的步骤是由一类神经网络模块所执行。
9.如上所述的人工智能辨识的半导体影像量测方法,前述类神经网络模块为卷积神经网络(convolutional neural networks,cnn)模块或递归神经网络(recurrent neural networks,rnn)模块。
10.本发明还揭示另一种人工智能辨识的半导体影像量测方法,其包括以下步骤:提供半导体的原始影像;优化处理前述原始影像,以获得优化影像;利用人工智能判断前述优
化影像所属的类型和/或种类;导入前述优化影像所属的类型和/或种类所预定的尺寸量测模式,并依照前述预定的尺寸量测模式,扫描前述优化影像,以获得前述优化影像的测量信号;以及从前述优化影像中抽出特定位置的对象,通过对应于前述抽出特定位置的对象的测量信号强度的运算以获得前述半导体中特定的物理参数。
11.如上所述的另一种人工智能辨识的半导体影像量测方法,前述半导体的原始影像是由扫描式电子显微镜(sem)、穿透式电子显微镜(tem)、原子力显微镜(afm)、聚焦离子束显微镜(fib)、以及x-光绕射结晶分析仪所构成族群其中之一所拍摄提供。
12.如上所述的另一种人工智能辨识的半导体影像量测方法,前述优化处理前述原始影像的步骤所优化处理的为前述原始影像的亮度、和/或对比、和/或敏锐度、和/或饱和度、和/或伽马校正、和/或灰阶、和/或色相、和/或色差、和/或色温、和/或焦距、和/或分辨率、和/或噪声、和/或边缘平坦化。
13.如上所述的人工智能辨识的半导体影像量测方法,前述特定位置为前述优化影像中的指定结构处、指定高度、指定距离、指定50%高度、最小处、最大处、最底部、最顶部。
14.如上所述的另一种人工智能辨识的半导体影像量测方法,前述特定的物理参数为前述半导体中特定层的厚度、宽度、厚度平均值、宽度平均值、厚度标准偏差、宽度标准偏差、厚度方均根、宽度方均根其中之一或其组合,和/或前述半导体中特定位置的长度、宽度、高度、间距、夹角、弧长其中之一或其组合。
15.如上所述的另一种人工智能辨识的半导体影像量测方法,前述测量信号强度的运算为强度差运算、积分差运算或微分差运算。
16.如上所述的另一种人工智能辨识的半导体影像量测方法,前述利用人工智能判断前述优化影像所属的类型和/或种类的步骤是由一类神经网络模块所执行。
17.如上所述的另一种人工智能辨识的半导体影像量测方法,前述类神经网络模块为卷积神经网络(convolutional neural networks,cnn)模块或递归神经网络(recurrent neural networks,rnn)模块。
附图说明
18.图1为根据本发明一实施例所揭示的一种人工智能辨识的半导体影像量测方法的流程图。
19.图2为根据本发明另一实施例所揭示的另一种人工智能辨识的半导体影像量测方法的流程图。
20.图3为利用本发明一实施例所揭示的人工智能辨识的半导体影像量测方法所量测的一个鳍式场效晶体管样品的tem原始影像剖视图。
21.图4为利用本发明一实施例所揭示的人工智能辨识的半导体影像量测方法所量测的另一个鳍式场效晶体管样品的tem原始影像剖视图。
22.图5为利用本发明一实施例所揭示的人工智能辨识的半导体影像量测方法所量测的一个鳍式场效晶体管样品的tem原始影像俯视图。
23.图6a为图3所示的鳍式场效晶体管样品的tem原始影像剖视图的部分放大图,且从前述tem原始影像中抽出特定位置的对象。
24.图6b为对应于图6a所示从前述tem原始影像中抽出特定位置的对象的测量信号强
度分布图。
25.图7a为利用本发明另一实施例所揭示的人工智能辨识的半导体影像量测方法所量测的另一个鳍式场效晶体管样品的tem原始影像剖视图。
26.图7b为图7a的优化影像。
27.图8a为利用本发明另一实施例所揭示的人工智能辨识的半导体影像量测方法所量测的另一个鳍式场效晶体管样品的tem原始影像俯视图。
28.图8b为图8a的优化影像。
具体实施方式
29.为了使本发明公开内容的叙述更加详细与完备,下文针对本发明的实施方案与具体实施例进行了说明性的描述;但这并非是实施或运用本发明具体实施例的唯一形式。以下所揭露的各种实施例,在有益的情形下可相互组合或取代,也可在一种实施例中附加其他的实施例,而无需进一步的记载或说明。
30.实施例
31.实施例一
32.请参阅图1,其为根据本发明一实施例所揭示的一种人工智能辨识的半导体影像量测方法的流程图。如图1流程图所示,本发明一实施例所揭示的一种人工智能辨识的半导体影像量测方法,其步骤包括:提供一半导体的原始影像;利用人工智能判断前述原始影像所属的类型和/或种类;导入所属的类型和/或种类所预定的尺寸量测模式,并依照前述预定的尺寸量测模式,扫描前述原始影像,以获得前述原始影像的测量信号;以及从前述原始影像中抽出特定位置的对象,通过对应于前述抽出特定位置的对象的测量信号强度的运算以获得前述半导体中特定的物理参数。
33.如上所述的人工智能辨识的半导体影像量测方法,其中前述半导体的原始影像是由例如但不限于扫描式电子显微镜(sem)、穿透式电子显微镜(tem)、原子力显微镜(afm)、聚焦离子束显微镜(fib)、以及x-光绕射结晶分析仪所构成族群其中之一所拍摄提供。
34.如上所述的人工智能辨识的半导体影像量测方法,其中前述特定位置为前述原始影像中的指定结构处、指定高度、指定距离、指定50%高度、最小处、最大处、最底部、最顶部。
35.如上所述的人工智能辨识的半导体影像量测方法,其中前述特定的物理参数为前述半导体中特定层的厚度、宽度、厚度平均值、宽度平均值、厚度标准偏差、宽度标准偏差、厚度方均根、宽度方均根其中之一或其组合,和/或前述半导体中特定位置的长度、宽度、高度、间距、夹角、弧长其中之一或其组合。
36.如上所述的人工智能辨识的半导体影像量测方法,其中前述利用人工智能判断前述原始影像所属的类型和/或种类的步骤是由一类神经网络模块所执行。
37.如上所述的人工智能辨识的半导体影像量测方法,其中前述类神经网络模块为例如但不限于卷积神经网络(convolutional neural networks,cnn)模块或递归神经网络(recurrent neural networks,rnn)模块。
38.本实施例一的半导体是以鳍式场效晶体管(fin field-effect transistor:finfet)为例示说明,但是适用于本实施例一的半导体并不局限于此,其他的半导体组件或
其他的非半导体组件的半导体也可适用,在此不再赘述
39.首先,本实施例一是利用穿透式电子显微镜(tem)拍摄一个鳍式场效晶体管样品,以提供如图3、4所示的鳍式场效晶体管(fin field-effect transistor:finfet)tem原始影像剖视图,或者如图5所示的鳍式场效晶体管(fin field-effect transistor:finfet)tem原始影像俯视图。此外,本实施例一的鳍式场效晶体管(fin field-effect transistor:finfet)的原始影像剖视图或俯视图也可视需要利用例如但不限于扫描式电子显微镜(sem)、原子力显微镜(afm)、聚焦离子束显微镜(fib)、以及x-光绕射结晶分析仪等所构成族群其中之一拍摄提供,在此不再赘述。
40.其次,利用人工智能判断前述原始影像所属的类型和/或种类。如前所述,本实施例中利用人工智能判断前述原始影像所属的类型和/或种类的步骤,是利用类神经网络模块例如但不限于卷积神经网络或递归神经网络来执行。在根据本发明的其他实施例中,利用人工智能判断前述原始影像所属的类型和/或种类也可利用常见的非类神经网络模块的人工智能来执行,在此不再赘述。如图3、4所示的鳍式场效晶体管(fin field-effect transistor:finfet)tem原始影像剖视图,经类神经网络模块判断后可知图3、4所示的鳍式场效晶体管(fin field-effect transistor:finfet)的鳍状结构虽不完全相同,但是均属于鳍式场效晶体管的tem影像剖视图,而图5所示的鳍式场效晶体管(fin field-effect transistor:finfet)tem原始影像俯视图,经类神经网络模块判断后可知属于鳍式场效晶体管的tem影像俯视图。
41.然后,导入所属的类型和/或种类所预定的尺寸量测模式,并依照前述预定的尺寸量测模式,扫描前述原始影像,以获得前述原始影像的测量信号。图3、4所示的鳍式场效晶体管(fin field-effect transistor:finfet)tem原始影像剖视图,经类神经网络模块判断属于鳍式场效晶体管的tem影像剖视图后,便可导入鳍式场效晶体管的tem影像剖视图所属的类型和/或种类预定的尺寸量测模式,并依照前述预定的尺寸量测模式,扫描前述原始影像,以获得前述原始影像的测量信号。图5所示的鳍式场效晶体管(fin field-effect transistor:finfet)tem原始影像俯视图,经类神经网络模块判断属于鳍式场效晶体管的tem影像俯视图后,便可导入鳍式场效晶体管的tem影像俯视图所属类型和/或种类的尺寸量测模式,并依照前述预定的尺寸量测模式,扫描前述原始影像,以获得前述原始影像的测量信号。
42.最后,从前述原始影像中抽出特定位置的对象,并通过对应于原始影像中抽出特定位置的物测量信号强度的运算,便可获得前述半导体中特定的物理参数。以图6a、6b例示说明,其中图6a为图3所示的鳍式场效晶体管样品的tem原始影像剖视图的部分放大图,且从前述tem原始影像中抽出特定位置的对象,图6b为对应于图6a所示从前述tem原始影像中抽出特定位置的对象的测量信号强度分布图。如图6a所示,从原始影像中抽出特定位置的对象的如同在如图6a所示的黑色框圈选区域,此时在如图6b所示的测量信号强度分布图中,通过例如但不限于测量信号的强度差、积分差或微分差等运算,便可获得图6a所示的鳍式场效晶体管样品的tem原始影像剖视图的部分放大图中的鳍状结构之间的间距。同理,半导体中特定的其他物理参数也可利用此方式运算获得。
43.如上所述,图3、4所示的原始影像中鳍式场效晶体管的鳍状结构,其高度、宽度以及间距,可在从图3、4所示的原始影像中抽出特定位置的对象,例如但不限于为鳍式场效晶
体管的鳍状结构,并通过测量信号强度的运算后获得,如以下表一所示。
44.表一图3鳍式场效晶体管的鳍状结构图4鳍式场效晶体管的鳍状结构高度48.6nm42.13nm宽度5.82nm5.61nm间距46.79nm35.05nm
45.如上所述,图5所示的原始影像中鳍式场效晶体管,其标准单元(cell)高度、宽度,可在从图5所示的原始影像中抽出特定位置的对象,例如但不限于为鳍式场效晶体管的标准单元(cell),并通过测量信号强度的运算后获得,如以下表二所示。
46.表二图5鳍式场效晶体管的标准单元(cell)高度114.16nm宽度244.32nm
47.实施例二
48.本实施例二所揭示的另一种人工智能辨识的半导体影像量测方法,其与本实施例一所揭示者的差异在于还包括优化处理前述原始影像的步骤,以获得优化影像。因此,当所提供的原始影像的画质不佳时,可通过此优化处理步骤以提供画质较佳的优化影像供人工智能辨识的半导体影像量测方法的后续步骤始用,提高尺寸量测的精准度。
49.请参阅图2,其为根据本发明另一实施例所揭示的另一种人工智能辨识的半导体影像量测方法的流程图。如图2流程图所示,本发明另一实施例所揭示的另一种人工智能辨识的半导体影像量测方法,其步骤包括:提供一半导体的原始影像;优化处理前述原始影像,以获得优化影像;利用人工智能判断前述优化影像所属的类型和/或种类;导入所属的类型和/或种类所预定的尺寸量测模式,并依照前述预定的尺寸量测模式,扫描前述优化影像,以获得前述优化影像的测量信号;以及从前述优化影像中抽出特定位置的对象,通过对应于前述抽出特定位置的对象的测量信号强度的运算以获得前述半导体中特定的物理参数。
50.如上所述的另一种人工智能辨识的半导体影像量测方法,其中前述半导体的原始影像是由扫描式电子显微镜(sem)、穿透式电子显微镜(tem)、原子力显微镜(afm)、聚焦离子束显微镜(fib)、以及x-光绕射结晶分析仪所构成族群其中之一所拍摄提供。
51.如上所述的另一种人工智能辨识的半导体影像量测方法,其中前述优化处理前述原始影像的步骤所优化处理的为前述原始影像的亮度、和/或对比、和/或敏锐度、和/或饱和度、和/或伽马校正、和/或灰阶、和/或色相、和/或色差、和/或色温、和/或焦距、和/或分辨率、和/或噪声、和/或边缘平坦化。
52.如上所述的人工智能辨识的半导体影像量测方法,其中前述特定位置为为前述优化影像中的指定结构处、指定高度、指定距离、指定50%高度、最小处、最大处、最底部、最顶部。
53.如上所述的另一种人工智能辨识的半导体影像量测方法,其中前述特定的物理参数为前述半导体中特定层的厚度、宽度、厚度平均值、宽度平均值、厚度标准偏差、宽度标准偏差、厚度方均根、宽度方均根其中之一或其组合,和/或前述半导体中特定位置的长度、宽度、高度、间距、夹角、弧长其中之一或其组合。
54.如上所述的另一种人工智能辨识的半导体影像量测方法,其中前述利用人工智能
判断前述优化影像所属的类型和/或种类的步骤是由一类神经网络模块所执行。
55.如上所述的另一种人工智能辨识的半导体影像量测方法,其中前述类神经网络模块为卷积神经网络(convolutional neural networks,cnn)模块或递归神经网络(recurrent neural networks,rnn)模块。
56.本实施例二的半导体同样可以用鳍式场效晶体管(fin field-effect transistor:finfet)为例示说明,但是适用于本实施例二的半导体并不局限于此,其他的半导体组件或其他的非半导体组件的半导体也可适用,在此不再赘述。
57.首先,本实施例二是利用穿透式电子显微镜(tem)拍摄一个鳍式场效晶体管样品,以提供如图7a所示的鳍式场效晶体管(fin field-effect transistor:finfet)tem原始影像剖视图,或者如图8a所示的鳍式场效晶体管(fin field-effect transistor:finfet)tem原始影像俯视图。此外,本实施例二的鳍式场效晶体管(fin field-effect transistor:finfet)的原始影像剖视图或俯视图也可视需要利用例如但不限于扫描式电子显微镜(sem)、原子力显微镜(afm)、聚焦离子束显微镜(fib)、以及x-光绕射结晶分析仪等所构成族群其中之一拍摄提供,在此不再赘述。但是,如图7a所示的鳍式场效晶体管(fin field-effect transistor:finfet)tem原始影像剖视图,以及如图8a所示的鳍式场效晶体管(fin field-effect transistor:finfet)tem原始影像俯视图,此二原始影像的画质均不理想,恐对于后续尺寸量测的精准度造成不小的影响,所以本实施例二所揭示的另一种人工智能辨识的半导体影像量测方法还包括一个步骤,优化处理如图7a、8a所示的原始影像,以获得如图7b、8b所示的优化影像。如上所述,优化处理前述原始影像的步骤所优化处理的可为前述原始影像的亮度、和/或对比、和/或敏锐度、和/或饱和度、和/或伽马校正、和/或灰阶、和/或色相、和/或色差、和/或色温、和/或焦距、和/或分辨率、和/或噪声、和/或边缘平坦化等,在此不再赘述。
58.其次,利用人工智能判断图7b、8b所示的优化影像所属的类型和/或种类。如前所述,本实施例中利用人工智能判断图7b、8b所示的优化影像所属的类型和/或种类的步骤乃利用类神经网络模块例如但不限于卷积神经网络或递归神经网络来执行。根据本发明的其他实施例中,利用人工智能判断优化影像所属的类型和/或种类的步骤也可利用常见的非类神经网络模块的人工智能来执行,在此不再赘述。
59.然后,导入图7b、8b所示的优化影像所属的类型和/或种类预定的尺寸量测模式,并依照前述预定的尺寸量测模式,扫描图7b、8b所示的优化影像,以获得前述优化影像的测量信号。
60.最后,从图7b、8b所示的优化影像中抽出特定位置的对象,并通过对应于优化影像中抽出特定位置的对象的测量信号强度的运算,例如但不限于测量信号的强度差、积分差或微分差等运算,便可获得图7b所示的优化影像的鳍状结构的高度、宽度以及间距,和/或图8b所示的优化影像的标准单元(cell)的高度、宽度以及间距。
61.综上所述,利用本发明所揭示的人工智能辨识的半导体影像量测方法,通过利用人供智慧判断半导体的原始像所属的类型和/或种类,导入其所属的类型和/或种类预定的尺寸量测模式,可迅速且精确地量测分属不同类型或种类的半导体的尺寸,大幅改善以往半导体的尺寸量测方法无法提供快速且精确的样品尺寸量测服务的缺点。
62.以上所述仅为本发明较佳实施例,并非用以限定本发明的范围,任何熟悉本项技
术的人员,在不脱离本发明的精神和范围内,可在此基础上做进一步的改进和变化,因此本发明的保护范围当权利要求书所界定的范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。