技术特征:
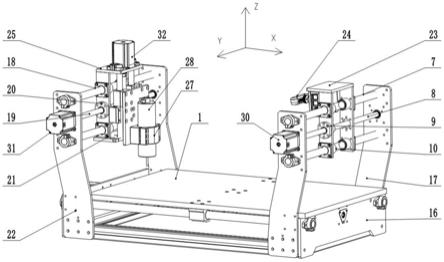
1.一种缺陷智能识别的电火花沉积修复装置,其特征在于,包括:工作台系统、检测系统以及沉积修复系统;所述工作台系统的一端设置检测系统,另一端设置沉积修复系统;所述检测系统,包括:检测系统y轴移动单元以及激光扫描检测器(24);所述检测系统y轴移动单元,通过对称设置的检测系统支撑架体(17)安装在工作台系统上;所述检测系统y轴移动单元上安装有激光扫描检测器(24);所述沉积修复系统,包括:沉积修复系统y轴移动单元、沉积修复系统z轴移动单元、进给板(26)、沉积电极固定器(27)和沉积电极(28);所述沉积修复系统y轴移动单元,通过对称设置的沉积修复系统支撑架体(22)安装在工作台系统上;所述沉积修复系统y轴移动单元上设置沉积修复系统z轴移动单元;所述沉积修复系统z轴移动单元上可升降的安装进给板(26);所述进给板(26)通过沉积电极固定器(27)安装沉积电极(28)。2.根据权利要求1所述的缺陷智能识别的电火花沉积修复装置,其特征在于,所述工作台系统,包括:工作台(1)、x轴移动单元和底部支撑基体(16);所述工作台(1)通过x轴移动单元设置在底部支撑基体(16)上方。3.根据权利要求2所述的缺陷智能识别的电火花沉积修复装置,其特征在于,所述x轴移动单元,包括:x轴导向柱(2)、x轴传动丝杆(3)、x轴丝杆螺母(4)、x轴导向块(5)和工作台驱动器(29);所述工作台驱动器(29)安装于所述底部支撑基体(16)上,所述工作台驱动器(29)的输出端与所述x轴传动丝杆(3)连接;所述x轴传动丝杆(3)设置于所述底部支撑基体(16)上;所述x轴传动丝杆(3)的两侧分别设置x轴导向柱(2);所述工作台(1)与x轴传动丝杆(3)之间通过所述x轴丝杆螺母(4)连接;所述工作台(1)与x轴导向柱(2)之间通过所述x轴导向块(5)连接。4.根据权利要求1所述的缺陷智能识别的电火花沉积修复装置,其特征在于,所述检测系统y轴移动单元,包括:检测系统y轴导向柱(7)、检测系统y轴传动丝杆(8)、检测系统y轴丝杆螺母(9)、检测系统y轴导向块(10)、检测系统y轴运动架(23)和检测系统驱动器(30);所述检测系统驱动器(30)安装于所述检测系统支撑架体(17)上,所述检测系统驱动器(30)的输出端与检测系统y轴传动丝杆(8)连接;所述检测系统y轴传动丝杆(8)设置在所述检测系统支撑架体(17)之间上部;所述检测系统y轴传动丝杆(8)的上下分别设置检测系统y轴导向柱(7);所述检测系统y轴运动架(23)与检测系统y轴传动丝杆(8)之间通过所述检测系统y轴丝杆螺母(9)连接;所述检测系统y轴运动架(23)与检测系统y轴导向柱(7)之间通过所述检测系统y轴导向块(10)连接;所述检测系统y轴运动架(23)上固定设置激光扫描检测器(24)。5.根据权利要求1所述的缺陷智能识别的电火花沉积修复装置,其特征在于,所述沉积修复系统y轴移动单元,包括:沉积修复系统y轴导向柱(18)、沉积修复系统y轴传动丝杆(19)、沉积修复系统y轴丝杆螺母(20)、沉积修复系统y轴导向块(21)、沉积修复系统y轴运
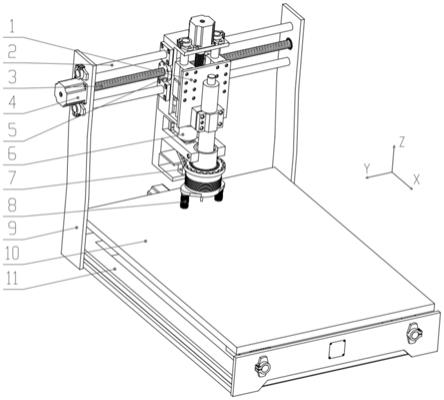
动架(25)和沉积修复系统驱动器(31);所述沉积修复系统驱动器(31)安装于所述沉积修复系统支撑架体(22)上,所述沉积修复系统驱动器(31)的输出端与沉积修复系统y轴传动丝杆(19)连接;所述沉积修复系统y轴传动丝杆(19)安装在所述检测系统支撑架体(22)之间上部;所述沉积修复系统y轴传动丝杆(19)的上下分别设置沉积修复系统y轴导向柱(18);所述沉积修复系统y轴运动架(25)与沉积修复系统y轴传动丝杆(19)之间通过沉积修复系统y轴丝杆螺母(20)连接;所述沉积修复系统y轴运动架(25)与沉积修复系统y轴导向柱(18)之间通过沉积修复系统y轴导向块(21)连接。6.根据权利要求5所述的缺陷智能识别的电火花沉积修复装置,其特征在于,所述沉积修复系统z轴移动单元,包括:z轴导向柱(12)、z轴向传动丝杆(13)、z轴丝杆螺母(14)、z轴导向块(15)和进给电机驱动器(32);所述进给电机驱动器(32)安装在沉积修复系统y轴运动架(25)上;所述进给电机驱动器(32)的输出端与z轴向传动丝杆(13)连接;所述z轴传动丝杆(13)安装在所述沉积修复系统y轴运动架(25)上;所述z轴传动丝杆(13)的两侧分别设置z轴导向柱(12);所述z轴传动丝杆(13)与进给板(26)之间通过z轴丝杆螺母(14)连接;所述z轴导向柱(12)与进给板(26)之间分别通过z轴导向块(15)连接。7.一种根据权利要求1至6任一项所述的缺陷智能识别的电火花沉积修复装置的沉积修复方法,其特征在于,包括以下过程:步骤1、将缺陷工件装夹在工作台(1)上;步骤2、工作台驱动器(29)驱动工作台(1)到达检测系统下方;步骤3、检测系统驱动器(30)驱动检测系统进行y轴向的运动调节,并通过激光扫描检测器(24)扫描检测缺陷工件;步骤4、获得缺陷工件的点云数据并进行封装网格面片,得到缺陷工件的几何尺寸及坐标信息,逆向建模处理得出完整工件的模型,通过对比得出准确的工件的缺陷部分模型的尺寸及坐标信息;步骤5、将缺陷部分模型进行切片处理,根据沉积次数与沉积厚度确定切片的次数与切片的厚度;步骤6、根据每层缺陷部分的切片的尺寸及坐标信息选取每次沉积的最佳坐标点;步骤7、沉积修复系统驱动器(31)驱动沉积修复系统进行y轴向的运动调节,进给电机驱动器(32)驱动沉积电极(28)对缺陷工件进行沉积修复;步骤8、根据每次沉积的次数与沉积厚度,计算出电极损耗并及时补偿;步骤9、重复步骤6
‑
8进行分层沉积修复,直至修复完成。
技术总结
本发明涉及缺陷修复技术领域,提供一种缺陷智能识别的电火花沉积修复装置及沉积修复方法,所述装置包括:工作台系统、检测系统以及沉积修复系统;所述检测系统,包括:检测系统Y轴移动单元以及激光扫描检测器;所述检测系统Y轴移动单元上安装有激光扫描检测器;所述沉积修复系统,包括:沉积修复系统Y轴移动单元、沉积修复系统Z轴移动单元、进给板、沉积电极固定器和沉积电极;所述沉积修复系统Y轴移动单元上设置沉积修复系统Z轴移动单元;所述沉积修复系统Z轴移动单元上可升降的安装进给板;所述进给板通过沉积电极固定器安装沉积电极。本发明能够实现对缺陷工件的自动识别检测和对缺陷工件的沉积修复。对缺陷工件的沉积修复。对缺陷工件的沉积修复。
技术研发人员:刘宇 邵伟强 马付建 王紫光 刘彦奎 张生芳 沙智华
受保护的技术使用者:大连交通大学
技术研发日:2021.10.19
技术公布日:2021/12/6
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。