1.本发明属于光学显微成像技术,特别是一种基于多角度照明反卷积的高分辨率显微成像方法。
背景技术:
2.自从leeuwenhoek于三百多年前第一次使用手工自制显微镜观察细胞以来,人类在显微成像领域陆续开展了诸多探索。其中,以看的更清楚,更精细为目的的高分辨率显微成像是其中重要的一环。1873年,abbe在德国显微镜学报上发表了显微镜衍射成像理论,对显微镜的成像过程做了科学的阐释,首次提出了显微镜的光学分辨率是有限的,受到物镜数值的限制(张祥翔.现代显微成像技术综述[j].光学仪器,2015(6):550
‑
560.)。
[0003]
在传统科勒照明下的明场显微成像中,由于衍射光线无法全部通过物镜,所以物空间的一个点经显微镜成像后会映射成一个衍射斑,导致分辨率的降低。在这里,系统的光学分辨率的计算方法常常采用瑞利判据,它规定当一点的衍射极大与另一点的第一衍射极小相重合时,则刚好能分辨两点。(katsumasa fujita,follow
‑
up review:recent progress in the development of super
‑
resolution optical microscopy[j],microscopy,volume 65,issue 4,august 2016,275
–
281)在瑞利判据下,显微镜的光学分辨率f
r
为:
[0004][0005]
综上所述,在照明光一定的情况下,显微镜的光学分辨率由物镜的数值孔径决定,所以要想对物体看的越精细,就需要越大数值孔径的物镜。然而瑞利判据下的光学分辨率截止频率只是人眼直接观察的分辨率极限,并不是光学成像系统的理论分辨率极限。光学系统的理论分辨率极限f(chao zuo,transport of intensity equation:a tutorial[j],optics and lasers in engineering,volume 135,2020,106
‑
187,)为:
[0006][0007]
其中,na
ill
为照明光源的数值孔径,当物镜数值孔径na
obj
较小时,na
ill
通常与na
obj
相等,此时光学系统的理论分辨率极限f为:
[0008][0009]
但是光学成像系统往往并不能达到其理论分辨率极限,原因是光学成像系统对信息的传递能力随着频率的升高而衰减,到截止频率附近衰减到0,会导致一定范围内的高频信息被淹没在噪声中。所以光学成像系统的实际分辨率难以达到理论分辨率极限的问题亟待解决。这里我们提出了一种基于多角度扫描的高分辨率显微成像方法,可以解决上述问题。
技术实现要素:
[0010]
本发明的目的在于解决了传统科勒照明下,因截止频率处信噪比过低而无法达到衍射极限分辨率的问题。
[0011]
本发明的技术方案如下:
[0012]
一种基于多角度照明反卷积的高分辨率显微成像方法,步骤如下:
[0013]
步骤一.原始图像采集,使用可编程led阵列作为成像系统的照明光源,依次点亮led阵列的led单元,由相机在同步触发信号下采集一系列不同照明角度下的图像序列i
m,n
(x,y),其中,i是光强图像,(x,y)是空域坐标,m,n是光强图像所对应的led单元在led阵列中的位置坐标;
[0014]
步骤二.计算出每个led单元的所对应的照明光空间频率矢量(u
m
,u
n
);
[0015]
步骤三.计算led阵列坐标为(m,n)的led单元所对应的相干强度传递函数atf
m,n
;
[0016]
步骤四.对步骤一中拍到的图像序列进行最小二乘反卷积,首先对拍到的强度图序列i
m,n
(x,y)做傅里叶变换得到强度图频谱序列(u,v)是频域坐标,然后进行最小二乘反卷积获得重构图像i
deconv
(x,y)。
[0017]
优选的,步骤二中,每个led单元所对应的照明光空间频率矢量(u
m
,u
n
)的计算公式为:
[0018][0019][0020]
其中,m为led阵列x方向的第m个led单元,n为led阵列y方向的第n个led单元,h为可编程led阵列距离待测样品的距离,d为led单元的间距,λ为照明波长。
[0021]
优选的,步骤三中,相干强度传递函数atf
m,n
的计算公式为:
[0022][0023]
其中(u,v)是频域坐标,为物镜相干照明截止频率,na
obj
是物镜数值孔径。
[0024]
优选的,步骤四中,最小二乘反卷积公式为:
[0025][0026]
其中,i
deconv
(x,y)为反卷积后图像的强度图,f
‑1傅里叶逆变换。
[0027]
本发明的有益效果是:(1)使用可编程led阵列使用角度扫描的方法拍摄多角度照明下待测物体的光强图序列,可以对非相干照明中的不同空间频率成分进行高信噪比,高
动态范围的信息采集,具有成像分辨率更高,成像效果更好的特点。(2)基于系统实际参数,对不同照明角度下的光强传递函数进行了计算,然后基于最小二乘法对所拍到的光强图序列进行反卷积重构,所得结果更精确,对噪声的鲁棒性更强。
附图说明
[0028]
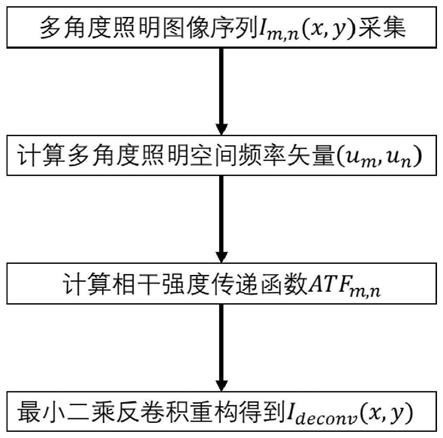
图1是基于多角度照明反卷积的高分辨率显微成像方法的流程图
[0029]
图2是不同角度照明下的强度图像、强度图像频谱和与之对应的相干强度传递函数atf
m,n
。
[0030]
图3是使用该方法的合成强度传递函数和传统非相干照明强度传递函数对比。
[0031]
图4是使用该方法的成像结果、使用传统非相干成像结果的对比。
具体实施方式
[0032]
为了使本技术的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本技术进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本技术,并不用于限定本技术。
[0033]
结合图1,本实施例是一种实现基于多角度照明反卷积的高分辨率显微成像方法,包括以下步骤:
[0034]
步骤一:多角度照明下的强度图像采集。使用可编程led阵列作为系统的照明光源,依次点亮led单元,led阵列的中心单元须对准成像系统光轴,led单元每次发出不同角度的单色或白色近似平面波照射在样品上。同时单色或彩色相机接收来自可编程led阵列的同步触发信号后开始曝光,对多角度照明下的待测物体所成像进行采集,形成单色或彩色光强图像序列i
m,n
(x,y)。其中,i(x,y)是光强图像,m,n是光强图像所对应的led单元在led阵列中的位置坐标。
[0035]
步骤二:根据可编程led阵列的位置参数,对每个led单元所对应的照明光空间频率矢量(u
m
,u
n
)进行计算:
[0036][0037][0038]
其中,m为led阵列x方向的第m个led单元,n为led阵列y方向的第n个led单元,h为编程led阵列距离待测样品的距离,d为led单元的间距,λ为照明波长。
[0039]
步骤三:计算每个led单元所对应的相干强度传递函数atf
m,n
。如图(2)所示,相干强度传递函数atf
m,n
与多角度照明下的强度图像i
m,n
(x,y)相对应,如果可编程led阵列的位置参数标定准确,计算所得的相干强度传递函数atf
m,n
应该与强度图像i
m,n
的频谱形状一致。相干强度传递函数atf
m,n
的计算公式如下:
[0040]
[0041]
其中(u
m
,u
n
)是led单元的所对应的照明光空间频率矢量,f
c
为物镜相干照明截止频率:
[0042][0043]
图2是强度图像频谱相干强度传递函数atf
m,n
和不同角度照明下的强度图像i
m,n
(x,y),可以看到在这几个照明角度下,强度图像频谱的形状与相干强度传递函数atf
m,n
匹配情况良好。
[0044]
步骤四:根据步骤三中得到的相干强度传递函数atf
m,n
,对步骤一中拍到的图像序列进行最小二乘反卷积,得到对待测样品的高分辨率成像结果。首先对拍到的强度图序列i(x,y)做傅里叶变换得到强度图频谱序列然后进行最小二乘反卷积,反卷积公式为:
[0045][0046]
其中,i
deconv
(x,y)为反卷积后图像的强度图,f
‑1傅里叶逆变换。
[0047]
图3是使用该方法的合成强度传递函数和传统非相干照明强度传递函数对比。可以看到本方法的合成强度传递函数在中高频区域的信息传递能力高于传统非相干成像的传递函数。
[0048]
图4是使用该方法所得到的成像结果(右)与传统非相干照明成像结果(左)对比,可以看出该方法具有更高的分辨率和更好的成像效果。
[0049]
对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本技术。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本技术的精神或范围的情况下,在其它实施例中实现。因此,本技术将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。