具有受约束运动的可铰接构件以及相关设备和方法
1.本技术是于2015年2月13日提交的名称为“具有受约束运动的可铰接构件以及相关设备和方法”的中国专利申请201580019171.1(pct/us2015/015849)的分案申请。
2.相关申请
3.本技术要求于2014年2月21日提交的美国临时申请no.61/943,106的权益,其全文以引用的方式并入本文。
技术领域
4.本公开的各方面涉及表现出受约束运动的可铰接构件。更具体地,本公开的各方面涉及利用此类可铰接构件的外科器械以及相关系统和方法。
背景技术:
5.可包括远程操作外科器械以及手动操作(例如,腹腔镜检查、胸腔镜检查)外科器械的远程控制外科器械通常用于微创医学过程。在医学过程期间,器械可铰接以将该器械的一部分定位在期望位置中。将器械定位在期望位置或取向中可通过约束该器械的一个或多个接头的运动来实现。然而,约束器械的一个或多个接头的运动的机构可增加机械复杂性和器械的操作,并且增加制造器械的难度。
6.微创外科器械的总体尺寸可对外科器械的设计造成约束。在各种应用中,可期望此类器械的总体尺寸,包括外部横向尺寸(例如,直径),相对较小以适合在狭窄的管腔和其他通道内。因此,在一些情况下,可期望选择力传输元件的数量和布局,以便减小器械的总体尺寸。例如,使一系列可铰接联接的连杆互连以提供致动力来控制连杆的弯曲的力传输元件的数量和布局可使得一个或多个力传输元件穿过一个或多个连杆,而不直接附接或终止于此类连杆。例如,一系列多个接头(或连杆对)的弯曲和转向可通过单个力传输元件(或者在多个弯曲方向和/或自由度(dof)的情况下通过单组力传输元件)致动,而不是每个接头或连杆对均能够通过直接附接到此连杆对的力传输元件的致动而单独直接弯曲。此配置有时被称为“欠约束(underconstrained)”。换言之,多个连杆对的转向和弯曲通过附接到并且终止于所述连杆对中的其中一对的连杆的单个力传输元件或单组力传输元件致动。然而,此类“欠约束”结构可在试图使结构可控制地转向和弯曲时造成挑战,从而潜在地导致连杆的不可预测和/或不可控制的移动(铰接)。
7.已经提出控制系统和其他机构以帮助约束原本欠约束关节式连杆结构的移动。然而,存在提供可铰接构件的替代设计的需要,替代设计实现受约束运动以便能够准确控制可铰接构件的移动和定位。
技术实现要素:
8.本公开的示例性实施例可解决上述问题中的一个或多个,并且/或者可展示出上述可期望特征中的一种或多种。其他特征和/或优点从以下描述中将变得显而易见。
9.根据至少一个示例性实施例,可铰接构件包括远侧端部、近侧端部、致动构件和约
束构件。致动构件可从近侧端部延伸到远侧端部。致动构件可传输力以使可铰接构件从中立位置弯曲。约束构件可从近侧端部延伸到远侧端部。约束构件可具有分别固定到远侧端部和近侧端部的相对端部。进一步地,约束构件可从近侧端部到远侧端部沿可铰接构件的至少一部分遵循螺旋路径。
10.根据另一个示例性实施例,可铰接构件可包括近侧端部、远侧端部、致动构件和约束构件。致动构件可从近侧端部延伸到远侧端部。致动构件可经配置传输力以使可铰接构件从中立位置弯曲。约束构件可从近侧端部延伸到远侧端部。约束构件可具有分别固定到远侧端部和近侧端部的相对端部。进一步地,致动构件可在可铰接构件的近侧端部与远侧端部之间沿可铰接构件的至少一部分遵循螺旋路径。
11.根据另一个示例性实施例,外科器械包括:轴、连接到轴的近侧端部的力传输机构、连接到轴的远侧端部的平行运动机构、腕部、致动构件和约束构件。腕部可包括多个连杆,并且联接到平行运动机构的远侧端部。致动构件可传输来自力传输机构的力以使可铰接构件从中立位置弯曲,或者使腕部从中立位置弯曲。约束构件可至少延伸穿过腕部。约束构件可被动地约束腕部机构的运动。约束构件的相对端部可分别固定到腕部的近侧端部和远侧端部。
12.附加目的、特征和/或优点一部分将在以下描述中进行阐述,并且一部分从该描述中将显而易见,或者可通过本公开和/或权利要求的实践获知。这些目的和优点中的至少一些可通过随附权利要求中具体指出的元件及组合来实现和获取。
13.应当理解,前述的一般描述和以下的详细描述仅为示例性和解释性的,并且不限制权利要求;相反,权利要求应被授予其全部范围,包括等效的范围。
附图说明
14.从以下单独或结合附图的详细说明可理解本公开。包括附图以提供对本公开的进一步理解,并且附图包括在本说明书中且构成本说明书的一部分。附图说明本教导的一个或多个示例性实施例,并且与说明书一起用来解释某些原理和操作。
15.图1a示出根据示例性实施例的远程操作手术系统。
16.图1b示出根据示例性实施例的患者侧推车的操纵器臂的一部分。
17.图2为包括力传输机构的外科器械的示例性实施例的顶视图。
18.图3为根据示例性实施例的包括关节式连杆结构的外科器械的远侧部分的局部视图。
19.图4为根据示例性实施例的器械的轴部分和力传输机构的局部顶视图。
20.图5为图3的局部视图,其中圆盘被移除以显示内部部件。
21.图6为根据示例性实施例的呈螺旋形状的致动构件的透视图以及在螺旋形状的角范围的平面中的投影。
22.图7a和图7b为关节式连杆结构的示例性实施例的侧视图和关节式连杆结构的圆盘的横截面图,以说明约束腱的螺旋路径。
23.图8a为根据示例性实施例的关节式连杆结构的圆盘的顶部透视图。
24.图8b为根据示例性实施例的关节式连杆结构的圆盘的顶部透视图。
25.图9为根据示例性实施例的包括关节式连杆结构的外科器械的远侧部分的局部视
图。
26.图10为沿图9中的线10
‑
10的横截面图。
27.图11为根据示例性实施例的包括编织结构的腕部的侧视图。
28.图12为在图11中的区域图12的放大视图。
29.图13为沿图11中的线13
‑
13的视图。
30.图14为根据示例性实施例的外科器械的远侧部分的侧视图,外科器械包括具有编织结构的关节式连杆结构。
31.图15为根据示例性实施例的包括编织结构的关节式连杆结构的侧视图。
32.图16为根据示例性实施的包括平行运动机构的外科器械的远侧部分的局部透视图。
33.图17为根据示例性实施例的图16的外科器械的远侧部分的局部透视图,其中平行运动机构铰接成偏转配置。
34.图18示出图16的外科器械的远侧部分的视图,其中外部表面被移除以有助于观看各种内部部件。
35.图19为根据示例性实施例的延伸穿过平行运动机构的中心管和致动构件的示意性透视图。
36.图20为根据示例性实施例的平行运动机构的圆盘的端视图。
37.图21为根据示例性实施例的外科器械的远侧部分的局部透视图,外科器械包括具有一个或多个共享约束机构的腕部和平行运动机构。
具体实施方式
38.说明示例性实施例的本说明书和附图不应被视为限制性的。在不脱离本说明书和权利要求(包括等效物)的范围的情况下,可做出各种机械的、组成的、结构的、电气的和操作的变化。在一些情况下,未详细示出或描述熟知的结构和技术,以便不使本公开模糊。在两个或更多个附图中相似编号表示相同或类似元件。此外,只要实际上可行,参考一个实施例详细描述的元件以及它们相关联的特征可包括在未被具体示出或描述的其他实施例中。例如,如果参考一个实施例对元件进行了详细描述而未参考第二实施例对其进行描述,则该元件仍可被要求包括在第二实施例中。
39.为了本说明书和所附权利要求的目的,除非另外指明,否则在所有情况下表示数量、百分比或比例的所有数字以及用于本说明书和权利要求中的其他数值在它们还未被如此修饰的范围内均应被理解成由术语“大约”修饰。因此,除非有相反的说明,否则在以下说明书和所附权利要求中阐述的数值参数为近似值,这些近似值可根据应当获得的期望性质而改变。最低程度上说,且并非试图将等同原则的应用限制到权利要求的范围,每个数值参数均应至少根据所报告的有效数位的数目并且通过应用常见的舍入技术进行解释。
40.应当注意,如在本说明书和所附权利要求中所使用,单数形式“一”、“一个”和“该”以及任何词语的任何单数用法均包括复数指代物,除非清楚明确地限于一个指代物。如本文所用,术语“包括”及其语法变型旨在表述为非限制性的,使得在列表中项目的叙述并不排除可代替或添加到所列出项目的其他相似项目。
41.进一步地,本说明书的专有名词并非旨在限制本公开或权利要求。例如,空间相关
的术语,诸如“下面”、“下方”、“下部”、“上方”、“上部”、“近侧”、“远侧”等等,可用于描述一个元件或特征部与另一个元件或特征部的关系,如在附图的取向中所说明。这些空间相关的术语旨在包括除附图中所示的方位和取向以外的在使用或操作中的设备的不同方位(即,位置)和取向(即,旋转布局)。例如,如果附图中的设备被颠倒,则描述为在其他元件或特征部“下方”或“下面”的元件可随后在其他元件或特征部“上方”或“上面”。因此,示例性术语“下方”可包括上方和下方的两种方位和取向。设备可以其他方式被取向(旋转90度或者在其他取向),并且可以相应地解释本文使用的空间上相关的描述语。附图中标记了外科器械的相对近侧方向和远侧方向。
42.在具有可铰接构件(诸如关节式连杆结构)的各种器械中,通过主动控制可铰接构件的部件(例如,圆盘)的移动来约束可铰接构件的移动。用于铰接可铰接构件的致动构件(诸如驱动腱或驱动杆)也可用于主动约束可铰接构件的移动。例如,致动构件可联接到力传输机构,诸如在美国专利no.6,817,974中描述的万向缆线致动器,并且联接到关节式连杆结构的圆盘,使得经由力传输机构传输到致动构件的力可用于移动圆盘并且铰接关节式连杆结构。该配置还可用于主动约束圆盘的移动,诸如通过将来自力传输机构的力传输到致动构件,以将圆盘保持在适当位置。
43.在一些情况下,经由致动构件主动约束移动的器械利用相对大数目的致动构件,以在可铰接构件进行铰接或者其移动受到约束时准确控制可铰接构件的移动。例如,腕部可包括附加接头,以增大腕部的运动范围。然而,这可产生致动和/或约束附加接头的附加致动构件,从而增加腕部的复杂性和成本,特别是当接头受到主动约束时。此外,特别是对于具有较小直径的器械来说,通常可期望使用较少的致动构件,以便节约器械内的空间。由于用于向致动构件施加力的机构,被主动控制的约束构件(例如,用于使用施加到致动构件的力主动地约束可铰接构件的移动的致动构件)除了它们的数目以外的性质可增加腕部的复杂性。因此,可期望提供未受到主动约束的约束构件。
44.本公开的各种示例性实施例设想了其中可铰接构件的移动受到被动约束的可铰接构件。换言之,可铰接构件的移动在不使用致动器诸如力传输机构和控制该致动器的控制算法的情况下受到约束。例如,在各种示例性实施例中,通过约束构件来被动约束关节式连杆结构的圆盘的移动,约束构件不可通过外部驱动或传输机构致动,而是对关节式连杆结构本身的运动(铰接)做出反应。根据示例性实施例,约束构件可固定在关节式连杆结构的相对端部处。因此,约束构件无需利用力传输机构来主动约束可铰接构件的移动,这允许使用较少的致动构件和潜在地不太复杂的力传输机构。进一步地,约束构件的端部可固定在可铰接构件的相对端部处。因此,约束构件无需延伸到致动器诸如力传输机构所位于的器械的近侧端部,从而沿在可铰接构件近侧的器械轴节约了空间。进一步地,通过不使约束构件延伸穿过器械的管腔(例如,轴)到达器械的近侧端部,则由于在该管腔内有较少的物体,所以管腔的内部空间可更易于清洁。
45.根据各种示例性实施例,本公开设想了用于器械的可铰接构件,该器械包括约束可铰接构件的运动的机构。约束机构可固定在可铰接构件的相对端部处,可铰接构件可以为腕部、平行运动机构或用于器械的其他可铰接构件。在各种示例性实施例中,可铰接构件为关节式连杆结构。在器械的腕部的一个示例性实施例中,约束机构沿腕部长度的至少一部分沿螺旋路径延伸。腕部可进一步包括基本上笔直地延伸穿过腕部的致动构件,诸如驱
动腱。腕部可包括一系列连接圆盘,这些圆盘围绕在不同方向(例如,正交的)上交替的旋转轴线枢转,或者围绕在基本上相同方向上延伸的两个连续旋转轴线枢转。约束机构不限于腱或杆而是可以为例如编织结构,编织结构可用于诸如通过替换关节式连杆结构的圆盘来提供可铰接构件的结构。替代地,编织结构可用于约束关节式连杆结构的圆盘的运动。在平行运动机构中,当约束机构和用于平行运动机构的驱动腱延伸穿过平行运动机构的长度的至少一部分时,约束机构可基本上笔直地延伸穿过平行运动机构,而用于平行运动机构的驱动腱沿螺旋路径延伸。根据示例性实施例,当器械包括腕部和平行运动机构两者时,约束机构可用于约束至少腕部的运动,或者腕部和平行运动机构两者的运动。在另一个示例中,独立的约束机构可用于分别约束腕部和平行运动机构的运动。
46.现在参考图1a,其示出远程操作的外科系统100的示例性实施例,外科系统100包括患者侧推车110、外科医生控制台120和辅助控制/影像推车130,外科医生控制台120用于接收来自用户的输入以控制患者侧推车110的器械。系统100可以为例如购自直观外科公司的da外科系统、dasi(型号is3000)、single site da外科系统或daxi外科系统。然而,各种其他远程操作外科系统配置可与本文描述的示例性实施例一起使用。现在参考图1b的示意图,其示出患者侧推车的操纵器臂140的示例性实施例,其中两个外科器械141、142处于安装方位。为简单起见,图1b的示意图仅描绘两个外科器械,但如本领域技术人员所熟悉的那样,在患者侧推车处两个以上的外科器械可被接收在安装方位中。每个外科器械141、142包括器械轴150、151,器械轴150、151在远侧端部处具有可移动端部执行器(以下关于图2进行讨论的)或相机或其他感测设备,并且可以或可以不包括控制远侧端部移动的腕部机构(以下关于图2进行讨论的)。
47.在图1b的示例性实施例中,外科器械141、142的远端部分通过单端口结构152接收以引入到患者体内。可与本公开一起使用的患者侧推车的其他配置可使用若干单独的操纵器臂。另外,单独的操纵器臂可包括单个器械或多个器械。进一步地,器械可以为具有端部执行器的器械,或者可以为相机器械或在外科过程期间使用的其他感测器械,以提供远程外科部位的信息(例如,可视化、电生理活性、压力、流体流动和/或其他感测数据)。
48.力传输机构147、148设置在每个轴150、151的近侧端部处,并且通过无菌适配器145、146与致动接口(interface)组件143、144连接。致动接口组件143、144包括由控制器(例如,在外科系统的控制推车处)进行控制的各种机构(以下关于图2的示例性实施例进行进一步讨论的),以响应外科系统的外科医生侧控制台处的输入命令将力传输到力传输机构147、148,从而致动器械141、142。
49.器械轴、腕部和端部执行器的直径或多个直径通常根据将与器械一起使用的插管的尺寸并且根据正在被执行的外科过程进行选择。在各种示例性实施例中,直径例如大约为3mm、4mm、5mm、6mm、7mm或8mm的轴和/或腕部插入一些现有的插管系统中;然而,较大器械尺寸也被认为在本公开的范围内。根据示例性实施例,外科器械141、142中的一个或多个可根据外科器械的类型经由通量传输导管132与通量源160连通。例如,如果外科器械141为电外科器械,则通量传输导管132为电能传输缆线,而通量源160为电能发生器。
50.转向图2,其示出根据示例性实施例的外科器械240的底部示意图。外科器械240可包括力传输机构250、在轴260的近侧端部263处连接到力传输机构250的轴260,以及连接到轴260的远侧端部265的端部执行器280。根据示例性实施例,端部执行器280可经由腕部270
联接到轴260的远侧端部265,如图2所示。腕部270可以一个或多个自由度(dof)(例如,俯仰、偏航和滚动)致动,以将端部执行器280定位在期望位置处。
51.根据示例性实施例,器械240可包括其他接头,诸如定位在轴260的远侧端部265与腕部270之间的平行运动机构(未示出)。对于关于示例性平行运动机构及其功能的进一步细节,参考于2011年5月17日发布的美国专利no.7,942,868和于2008年3月13日公开的美国专利no.us 2008/0065105,两者均以引用方式全文并入本文中。
52.外科器械240可包括一个或多个致动构件,以使力在力传输机构250与端部执行器280之间,并且在力传输机构250与腕部270和/或平行运动机构(未示出)之间进行转移。例如,一个或多个致动构件290可将力传输机构250连接到端部执行器280,以向端部执行器280提供致动力。致动构件可沿轴260的内部延伸。通过利用一个或多个致动构件290,力传输机构250可致动端部执行器280,以例如控制端部执行器280的钳口(或其他可移动部分)并且/或者控制器械240的腕部270。一个或多个致动构件290可以为张力构件,诸如例如缆线、线等,并且可以牵拉
‑
牵拉的方式致动外科器械。在另一个示例性实施例中,一个或多个致动构件290可以为压缩构件,诸如例如推杆等,并且以推动
‑
牵拉的方式操作,如在于2013年10月1日公布的美国专利no.8,545,515中所描述,其以引用方式全文据此并入。
53.力传输机构250可包括一个或多个部件以接合远程操作外科系统的患者侧推车,从而将患者侧推车提供的力转移到外科器械240。根据示例性实施例,力传输机构250包括一个或多个驱动器圆盘252、254,驱动器圆盘252、254与患者侧推车的患者侧操纵器接合,如在美国专利no.8,545,515中所描述。因此,驱动器圆盘252、254利用来自远程操作的(机器人的)操纵器的致动力以致动器械240的各个dof,包括但不限于例如,滚动、俯仰、偏航和/或各种端部执行器的移动(例如,打开、闭合、转移)。力传输机构250并不限于两个驱动器圆盘252、254,而是可包括更少或更多数目的驱动器圆盘。例如,力传输机构250可包括对应于器械240的dof的数目的多个驱动器圆盘,其中一些圆盘或圆盘的组合潜在地控制多个器械dof。另外,虽然驱动器圆盘252、254被描述为基本上平行于图2的页面的平面,这导致驱动器圆盘252、254的旋转轴线(未示出)基本上垂直于图4的页面的平面延伸,同时轴260基本上平行于图4的页面的平面延伸,但本文描述的实施例可使用包括以其他配置布置的驱动器圆盘的力传输机构,诸如例如旋转轴线基本上平行于轴260延伸的驱动器圆盘。
54.外科器械240的轴260、腕部270和端部执行器280的直径或多个直径,以及相机器械的直径通常根据将与器械一起使用的插管的尺寸进行选择。在另一个示例性实施例中,相机器械的直径和腕部270与主轴260的直径可在从大约3mm至大约10mm的范围内。在另一个示例性实施例中,相机器械的直径和腕部270与主轴260的直径可在从大约5mm至大约8mm的范围内。例如,直径可以为大约4mm、大约5mm、大约6mm、大约7mm或大约8mm,例如以便使尺寸设定成插入一些现有的插管系统内。进一步地,尽管器械可具有圆形横截面,但也可设想具有非圆形横截面的器械。例如,相机器械可具有卵形横截面,诸如长轴长度为例如大约13mm至大约17mm,而短轴长度为例如大约8mm至大约10mm的横截面。
55.通过使可铰接构件的部件的不期望移动最小化,用于约束可铰接构件诸如腕部的移动(弯曲)的系统和技术可允许精确控制可铰接构件的移动。例如,当可期望具有单个弯折的弧形形状时,约束机构可使圆盘在非预期方向上的移动最小化,在非预期方向上的移动可导致圆盘相对于关节式连杆结构中的其他圆盘滑动或错位,或者可导致s形配置。
56.如上所讨论,通过使一组致动元件(例如,腱)连接到一个或多个力传输机构(诸如力传输机构250),可主动地约束可铰接构件(诸如腕部)的运动。器械的传输机构中的各种机构可用于提供对致动元件的控制,并且从而用来约束关节式连杆结构或其他可铰接构件的运动。
57.利用多组缆线的约束配置可增加器械的机械复杂性并且占用可用于其他部件的较小器械中的宝贵空间,所述缆线终止于一系列圆盘中的每个处以主动控制圆盘的运动,并且在器械的近侧端部处延伸到力传输机构。
58.鉴于这些考虑,本公开的各种示例性实施例设想了表现出受约束运动的可铰接构件,使得可铰接构件的铰接移动以相对可重复的、精确的并且平滑的方式进行,从而将可铰接构件定位在期望且可预测的配置中。进一步地,包括根据本公开示例性实施例的可铰接构件的器械尽管器械总直径相对小但可具有机械上较不复杂的力传输机构,可相对易于操作,并且对制造而言成本高效。
59.根据示例性实施例,具有受约束运动的可铰接构件为在外科器械中用作腕部的关节式连杆结构。转向图3,其示出器械轴的远侧部分300。作为非限制性示例,外科器械可以为相机器械或具有端部执行器的外科器械,端部执行器通过根据图2的示例性实施例的腕部支撑。例如,端部执行器或相机设备(未示出)可连接到外科器械远侧部分300的远侧端部302,远侧端部302可以为例如衬圈。如图3所示,远侧部分300可包括腕部310,腕部310连接到器械的在腕部310近侧的部分316。部分316可以为例如根据图2的示例性实施例的器械轴的远侧端部,或者可以为平行运动机构的远侧端部,如将在以下进行讨论的。腕部310为包括多个圆盘的关节式连杆结构,多个圆盘在圆盘之间的接头处连接,以在任意的俯仰和/或偏航方向上为腕部310提供运动。例如,腕部310可包括圆盘311
‑
315,但在腕部中可利用其他数目的圆盘,诸如7个圆盘(诸如在具有6个接头的腕部机构中)、8个圆盘(诸如在具有7个接头的腕部中)或者甚至更多数目的圆盘。尽管本文描述的示例性实施例被描述为包括圆盘,但这仅是一种可能的非限制性配置。例如,对于本文描述的示例性实施例可使用连杆代替圆盘。根据示例性实施例,圆盘311
‑
315可包括机械止动件(未示出)以限制腕部310的运动,诸如在俯仰和/或偏航方向上的运动。
60.如图3所描绘,腕部310进一步包括在一对圆盘311与312之间提供旋转轴线350的接头322;在一对圆盘312与313之间提供旋转轴线352的接头324;在一对圆盘313与314之间提供旋转轴线354的接头326;以及在一对圆盘314与315之间提供旋转轴线356的接头328。轴线350和轴线354在彼此基本上相同的方向上延伸,并且轴线352和轴线356在彼此基本上相同的方向上且在基本上正交于轴线350和轴线354的方向上延伸。因此,轴线350、352、354、356被布置成提供接头322、324、326和328的任意俯仰和偏航方向上的移动,其中轴线350、352、354、356在不同的方向上交替,如图3所示。尽管接头322、324、326、328在图3的示例性实施例中被描述成各自具有单个轴线(轴线350、352、354、356分别用于接头322、324、326、328中的每个),但接头322、324、326、328可代替地包括其他数目的轴线。例如,接头322、324、326、328可根据于2014年12月16日公开的美国专利no.8,911,428的示例性实施例进行铰接,该专利以引用方式全文据此并入,包括美国专利no.8,911,428的图25的示例性实施例。
61.如图3的示例性实施例所示,一个或多个致动元件320延伸穿过腕部310。例如,致
动元件320可以为用于诸如通过将致动元件320的远侧端部固定到器械轴部分300的远侧端部302,或者固定到腕部310的圆盘311来致动腕部310的腱。在另一个示例中,一个或多个致动元件320可用于致动器械的其他部件,诸如外科器械的端部执行器,诸如根据图2的示例性实施例的致动构件290和端部执行器280。根据示例性实施例,并且如图3所说明,致动元件320在所述致动元件320穿过腕部310时可基本上笔直地延伸。
62.根据示例性实施例,致动元件320可成对布置,所述致动元件延伸穿过腕部310、器械的轴,并且延伸到力传输机构。力传输机构可包括致动所述致动元件的各种类型的机构,诸如例如,绞盘、齿轮、杠杆、万向节、齿条和小齿轮设备、滑轮以及本领域技术人员所熟悉的其他设备。例如,布置成两对的四个致动元件320可延伸穿过腕部310,但也可利用其他数目的致动元件320和成对的致动元件320。一对致动元件320可连接到绞盘从而以诸如牵拉/牵拉驱动机构或推动/牵拉驱动机构的形式将致动元件致动,如在美国专利no.8,545,515中所描述。根据示例性实施例,绞盘可连接到图2的示例性实施例的力传输机构250的接口圆盘252、254中的一个,接口圆盘252、254传输接收自图1a的示例性实施例的患者侧推车110的患者侧操纵器的力,从而使绞盘旋转并致动所述致动元件320。正如本领域技术人员所熟悉的,可使用其他力传输机构,其中绞盘为非限制性和示例性配置。
63.如图4的示例性实施例所示,诸如当致动元件364为牵拉/牵拉致动构件时,致动元件364可延伸穿过器械的轴362到力传输机构360。在另一个示例性实施例中,致动元件364可以为推动/牵拉致动构件,并且齿轮可取代绞盘366来驱动致动元件364。力传输机构360可根据图2的示例性实施例进行配置。例如,力传输机构360可包括致动绞盘366的接口驱动器圆盘,类似于图2的示例性实施例的接口驱动器圆盘182、184。
64.腕部310可包括被动地约束腕部310的运动的结构。根据示例性实施例,腕部310可包括延伸穿过腕部310的一个或多个约束腱。为约束腕部310的运动,一个或多个约束腱可固定到腕部310的远侧端部和近侧端部。根据示例性实施例,一个或多个被动约束腱可固定到腕部310的可铰接部分诸如例如由圆盘311
‑
315提供的可铰接部分的端部。因此,如以下将讨论,一个或多个约束腱可固定到例如圆盘311和圆盘315本身,或者固定到在圆盘311和圆盘315近侧的方位。当腕部310被铰接以弯曲期望的方向时,一个或多个约束腱将与腕部310一起弯曲。由于一个或多个约束腱固定到腕部310的远侧端部和近侧端部,所以一个或多个约束腱相对于腕部310具有固定的长度,从而使一个或多个约束腱被动地施加力到圆盘311
‑
315。因此,如果圆盘311
‑
315中的一个开始相对于其他圆盘在径向方向上平移,则约束腱将作用于平移圆盘上,以便旨在阻碍平移移动并且保持圆盘沿腕部的纵向轴线对齐。例如,如果圆盘313经历用来使圆盘313相对于圆盘312和圆盘314沿方向358径向平移的力,则与圆盘313接触的约束腱将诸如通过穿过圆盘313中的孔而作用于圆盘313,以阻碍沿方向358的径向平移,从而旨在约束圆盘313的平移移动。
65.可经由例如将约束腱焊接在适当位置,将约束腱压接(crimp)到另一个物体,或者通过本领域技术人员熟悉的其他方法而将约束腱固定在适当位置。例如,约束腱的远侧端部可固定到圆盘311或器械的远侧端部302,并且一个或多个约束腱的近侧端部可固定到圆盘315或在腕部310近侧的器械部分316。转向图5,其示出图3的远侧器械轴部分300但其中圆盘312
‑
314仅以虚线表示,以显示腕部310的内部部件,根据示例性实施例,约束腱330、332、334、336各自通过夹具338固定在腕部310的近侧端部处。夹具338可位于圆盘315或器
械部分316的通道内。约束腱330、332、334、336的远侧端部也可通过夹具(未示出)固定在圆盘311或器械轴远侧部分300的远侧端部302的通道内。
66.根据示例性实施例,约束腱可固定在适当位置以便向约束腱施加张力。在各种示例性实施例中,当腕部处于如图3的示例性实施例所示的基本上笔直或中立配置时,施加到固定约束腱的张力(其也可被称为预加载张力)可在例如大约0磅至大约5磅的范围内。例如,当张力在基本上笔直或中立配置中大约为0磅时,约束腱可在腕部一旦铰接时就向腕部的圆盘施加力,以约束圆盘的运动。根据另一个示例性实施例,当腕部处于如图3的示例性实施例所示的基本上笔直或中立配置时,施加到固定约束腱的张力可在例如从大约3磅至大约5磅的范围内。根据示例性实施例,由于约束腱固定在腕部的端部处,所以约束腱并不延伸穿过器械的轴到力传输机构,并且并不通过力传输机构致动,这可简化力传输机构,有助于控制并且节约器械空间。
67.根据示例性实施例,约束腱可通过腕部的至少一部分而扭转(例如,以基本上螺旋的型式)。尽管如图5的示例性实施例所示,腕部310包括4个约束腱330、332、334、336,但本公开设想其他数目的约束腱,诸如2个、3个、5个、6个、7个、8个或更多个约束腱。根据示例性实施例,约束腱330、332、334、336沿螺旋路径从圆盘315延伸到圆盘311,如图5所示,使得约束腱330、332、334、336中的每个横贯螺旋路径。
68.根据示例性实施例,本文描述的示例性实施例的约束腱当沿螺旋路径延伸时可连续弯曲,并且遵循基本上扭转的路径。例如,约束腱可沿螺旋路径延伸,螺旋路径具有基本上恒定的曲率半径或者具有在沿约束腱的各个节段中不同的曲率半径。根据另一个示例性实施例,沿螺旋路径延伸的约束腱可包括约束腱在其中基本上笔直地延伸的一个或多个笔直路径节段。例如,约束腱可包括在圆盘诸如例如在圆盘311
‑
315中的每个之间延伸的笔直节段。根据示例性实施例,通过包括一系列相对于彼此成角度以提供螺旋路径的基本上笔直的节段,约束腱可沿螺旋路径延伸。根据另一个示例性实施例,约束腱可包括其中约束腱弯曲的一个或多个弯曲节段和一个或多个基本上笔直的节段的混合。例如,约束腱可在穿过圆盘时弯曲,而在圆盘之间基本上笔直。根据示例性实施例,当约束腱沿器械的纵向方向延伸时,约束腱的倾斜度可基本上恒定或可改变。例如,当约束腱沿器械的纵向方向延伸时,约束腱的倾斜度可从一个弯曲节段到另一个弯曲节段,从一个笔直节段到另一个笔直节段,或者在约束腱的笔直节段与弯曲节段之间改变。不管约束腱所遵循的螺旋路径是否包括一些笔直节段或可变曲率度,螺旋路径均可被认为是大致螺旋状的,使得约束腱当投影到平面上时在一些角范围内延伸。
69.约束腱的螺旋路径的角范围进一步在图6的示例性实施例中加以说明。如图6所示,螺旋扭转的腱在螺旋路径400中围绕纵向轴线408(在螺旋路径400的中心线处)从第一端402延伸到第二端406。为示出螺旋路径400的角范围,螺旋路径400可投影到垂直于轴线408的平面401上。该投影为弧410,弧410的曲率半径403对应于扭转路径400的曲率半径,其中弧410上的点对应于螺旋路径400上的位置。例如,弧410上的点412对应于螺旋路径的第一端402,并且弧410上的点414对应于在螺旋路径长度大致中间的点404。尽管螺旋路径400在图6的示例性实施例中被描述成具有基本上连续的曲率半径403,但螺旋路径400(并且因此弧410)还可包括具有不同曲率的节段,并且可包括一个或多个笔直节段,如以上所讨论。因此,当在本文的示例性实施例中讨论螺旋路径时,该螺旋路径可具有曲率半径基本上连
续的螺旋形状,或者螺旋路径可包括具有不同曲率半径的节段,包括具有不同曲率半径的弯曲节段和/或笔直节段。
70.如图6所示,相对于中心线408(也投影到平面401上),在弧410上的点412与点414之间的角范围420为大约180
°
。因此,当在本文的示例性实施例中讨论螺旋路径的角范围时,该角范围可根据相对于中心线408的角范围420来确定,如图6所示。进一步地,由于螺旋路径400从第一端402到第二端406完成全360度螺旋扭转,所以弧410上的点412对应于第一端402和第二端406两者,其中第一端402与第二端406之间的角范围422为360度。因此,在图6的示例性说明中,弧410形成完整的圆。然而,在螺旋路径未完成360度扭转的实施例中,弧410将未完成圆,因为螺旋路径的角范围小于360度。
71.根据示例性实施例,约束腱330、332、334、336沿螺旋路径延伸,使得约束腱330、332、334、336沿腕部310的整个长度具有大约360度的角范围。例如,约束腱330、332、334、336可沿螺旋路径延伸,当腕部310包括四个圆盘311
‑
315时,该螺旋路径在腕部310的每个圆盘311
‑
315之间具有大约90度的角范围。换言之,约束腱330、332、334、336可各自在圆盘315与圆盘314之间、在圆盘314与圆盘313之间、在圆盘313与圆盘312之间以及在圆盘312与圆盘311之间沿具有大约90度角范围的螺旋路径延伸。在另一个示例性实施例中,腕部可包括6个圆盘,其中腕部的约束腱在腕部的每个圆盘之间沿具有大约60度的角范围的扭转路径延伸,其中对于约束腱而言,沿整个腕部的总角范围为360度。因此,根据示例性实施例,约束腱可沿扭转路径延伸,该扭转路径的角范围等于对于约束腱而言跨过腕部的总角范围(例如,360度)除以腕部的圆盘的数目。然而,本公开的各种示例性实施例设想腕部的约束腱可沿螺旋路径延伸到其他角范围。例如,约束腱可沿螺旋路径延伸,使得角范围的量在腕部的不同圆盘之间不同。此配置可提供沿腕部长度的不同节段实现不同弯曲(铰接)度的腕部。进一步地,根据示例性实施例,约束腱的总角范围可以为360度的整数倍,诸如当器械包括整数倍个腕部时。进一步地,根据示例性实施例,约束腱可在圆盘之间沿螺旋路径延伸与大约90度不同的量,诸如例如大约180度。根据示例性实施例,约束腱可按照在提交于2014年2月21日的美国临时申请no.61/943,084(代理人案号isrg04490prov/us)的示例性实施例中描述的量沿螺旋路径延伸,该申请以引用的方式全文据此并入。
72.为说明约束腱的螺旋路径,在图7a的示例性实施例中示出了包括圆盘361
‑
365的腕部360的侧视图,其中以虚线示出了穿过圆盘361
‑
365的单个约束腱的螺旋路径366,以有助于观看螺旋路径,但可设想不同数目的约束腱,如以上关于图3的实施例所讨论。进一步地,图7b所示的穿过圆盘361
‑
365的相应横截面371
‑
375说明了约束腱穿过圆盘361
‑
365的路径366的方位。在图7a的示例性实施例中,约束腱的路径366从圆盘到圆盘遵循具有大约90度角范围的螺旋路径,但可利用其他角范围,如以上所讨论。
73.扭转约束腱以便穿过腕部的至少一部分横贯螺旋路径提供了除约束腕部的运动以提供对腕部的移动和形状的准确控制以外的优点。例如,约束腱可沿螺旋路径延伸,使得约束腱定位在与腕部的圆盘之间的接头不同的方位中。如在图3的示例性实施例中所示,腕部310包括在圆盘311与圆盘312之间的接头322,接头322允许圆盘311和圆盘312在方向351上相对于彼此围绕轴线350旋转(即,枢转)。约束腱334和约束腱336在圆盘311与圆盘312之间延伸,使得约束腱334和约束腱336并未物理穿过接头322。换言之,约束腱334和约束腱336从接头322偏移,如图3所示。因此,接头322无需包括用于约束腱334和约束腱336的中空
通道,从而允许接头322具有较小的尺寸,同时还起到在圆盘311与圆盘312之间承载压缩负载的作用。
74.约束腱可遵循扭转路径以避开连接圆盘的接头,所以约束腱偏移或以其他方式邻近接头。例如,约束腱334和约束腱336可在腕部310的开口侧上在圆盘311与圆盘312之间延伸(当腕部310处于图3所示的笔直配置或中立配置时),其中在圆盘311与圆盘312之间提供孔340,使得约束腱334和约束腱336并不穿过接头322,否则由于约束腱334和约束腱336穿过接头322而导致接头322削弱。根据示例性实施例,接头322可包括在圆盘311中的表面304和在圆盘312中的表面306,表面304和表面306彼此接触以在圆盘311与圆盘312之间形成旋转接头。约束腱334和约束腱336可在圆盘311与圆盘312之间延伸,使得约束腱334和约束腱336并不穿过表面304和表面306,否则就需要穿过表面304和表面306并且使表面304和表面306削弱。例如,约束腱334和约束腱336可在横向方向上从接头322的表面304和表面306偏移。
75.类似地,约束腱330和约束腱334可在圆盘313与圆盘312之间延伸,所以约束腱330和约束腱334并不穿过接头324,这允许圆盘313和圆盘312在方向352上相对于彼此围绕轴线352旋转;约束腱330和约束腱332可在圆盘314与圆盘313之间延伸,所以约束腱330和约束腱332并不物理穿过接头326,这允许圆盘314和圆盘314在方向355上相对于彼此围绕轴线354旋转;并且约束腱332和约束腱336可在圆盘314与圆盘315之间延伸,所以约束腱332和约束腱336并不物理穿过接头328,这允许圆盘315和圆盘314在方向357上相对于彼此围绕轴线356旋转。
76.腕部的圆盘可经配置在约束腱穿过圆盘时定位和/或引导约束腱。例如,可期望避免使约束腱穿过圆盘之间的接头。转向图8a,其示出了圆盘500的示例性实施例的透视图。图3和图5的腕部的圆盘311
‑
315可根据圆盘500进行配置。圆盘500包括驱动腱可穿过其中的一个或多个驱动腱孔510。例如,当图3和图5的示例性实施例的圆盘311
‑
315根据圆盘500的示例性实施例进行配置时,致动元件320可延伸穿过驱动腱孔510。进一步地,圆盘500可包括约束腱可穿过其中的一个或多个约束腱孔512。因此,当腕部310的圆盘311
‑
315根据圆盘500的示例性实施例进行配置时,约束腱330、332、334、336可延伸穿过约束腱孔512。圆盘500可进一步包括中心孔516,一个或多个通量导管(例如,电导体或光纤)或者其他致动元件诸如用于端部执行器的致动元件可延伸穿过中心孔516。
77.由于约束腱沿腕部的至少一部分在螺旋路径上延伸,所以当腕部经致动以铰接和弯曲时,约束腱可比驱动腱扫过(例如,相对于圆盘500在方向530上移动)更大的圆周范围,驱动腱在腕部圆盘之间的基本上笔直方向上延伸。约束腱孔512可位于靠近圆盘500的外周边502处,因为当约束腱进一步远离圆盘的中心孔516定位时,可发生较少的约束腱扫掠。尽管仍可发生一些约束腱扫掠,但使约束腱孔512位于更靠近周边502处还为圆盘500的中心孔516和/或接头结构520提供了更多空间。如在图8a的示例性实施例中所示,驱动腱孔510和约束腱孔512两者均可相对于中心孔516在沿径向方向515的类似方位中位于靠近圆盘500的外周边502处。
78.根据另一个示例性实施例,驱动腱孔510和约束腱孔512可沿径向方向515位于不同位置。例如,约束腱孔512可从驱动腱孔510径向偏移,使得约束腱孔512相比于驱动腱孔510位于沿径向方向515更靠近中心孔516处。因此,延伸穿过约束腱孔512的约束腱可位于
圆盘500的接头结构520的径向内部处,使得约束腱不妨碍接头结构520。在另一个示例中,沿不同螺旋路径方向延伸的约束腱的约束腱孔512可彼此偏移。例如,在图5中的第一方向342上(诸如例如,在远侧方向近侧的左手方向上)沿螺旋路径延伸的约束腱330的孔和在第二方向344上(诸如例如,在远侧方向近侧的右手方向上)沿螺旋路径延伸的约束腱334的孔可偏移,以最小化或避免在不同方向上延伸的约束腱之间的摩擦。
79.根据示例性实施例,驱动腱孔510可沿径向方向515位于距中心孔516例如大约0.095英寸至大约0.100英寸的距离处,并且约束腱孔可沿径向方向515位于距中心孔516例如大约0.080英寸至大约0.085英寸的距离处。在其中约束腱孔512与驱动腱孔510径向偏移的示例性实施例中,圆盘500可包括4个约束腱孔512(如在图8a的示例性实施例中所示)用于对应数目的约束腱,但可利用其他数目的约束腱孔512和约束腱。例如,可使用3个、5个、6个、7个、8个或更多个约束腱孔512和约束腱。根据示例性实施例,所使用的约束腱和约束腱孔512的数目可等于例如在包括一个或多个圆盘500的腕部中的接头数目加一。
80.为适应约束腱的扫掠,约束腱孔512可具有例如与驱动腱孔510不同的形状。例如,驱动腱孔510可具有基本上圆形的横截面,而约束腱孔512可具有细长且非圆形横截面,诸如沿方向530伸长。例如,约束腱孔512可具有卵形、椭圆形或肾形形状。在另一个示例中,约束腱孔512可沿方向530跨越与驱动腱孔510不同的范围。例如,约束腱孔512可沿方向530跨越比驱动腱孔510更大的范围。根据示例性实施例,驱动腱孔510可具有在例如从大约0.020英寸至大约0.025英寸范围内的直径,并且约束腱孔512沿圆周方向530可具有例如从大约0.020英寸至大约0.025英寸的长度,其中约束腱孔512的长度或直径等于或大约驱动腱孔510的长度或直径。由于约束腱孔512的细长形状和/或圆周长度,当腕部经致动以从其中立方位弯曲时,约束腱孔512可更好地适应延伸穿过约束腱孔512的约束腱的扫掠。
81.根据示例性实施例,圆盘500可包括凹陷表面部分514,凹陷表面部分514位于邻近约束腱孔512处并且从约束腱孔512延伸。由于约束腱沿腕部的至少一部分沿螺旋路径延伸,所以约束腱可沿圆周方向530并且抵靠约束腱孔512的圆周边缘513扫掠。通过邻近约束腱孔512提供凹陷表面部分514,可进一步适应约束腱的扫掠,诸如通过当约束腱抵靠约束腱孔512的圆周边缘513进行扫掠时允许约束腱进入凹陷表面部分514中。凹陷表面部分514可具有例如细长形状,细长形状的深度基本上恒定或者其深度通过诸如在远离凹陷表面部分514与其邻近的约束腱孔的方向上减小而发生改变。因此,后者提供了从孔512一直到圆盘500的表面的斜坡状特征。根据示例性实施例,凹陷表面部分514可成一定角度倾斜,例如,该角度可在从大约20度至大约30度的范围内。
82.根据示例性实施例,圆盘500可包括接头结构520以在相邻的圆盘之间形成接头。接头结构520可以各种方式配置。例如,接头结构520可包括如在2014年11月18日公开的美国专利no.8,887,595中所描述的摆线形状,该专利以引用方式全文据此并入,或者接头结构520可根据2014年12月16日公开的美国专利no.8,911,428的示例性实施例进行配置,该专利以引用方式全文据此并入。图3的示例性实施例的接头322、324、326、328可像接头结构520那样进行配置。根据示例性实施例,接头结构520可包括突出部522(或齿状物)。突出部522可插入相邻圆盘诸如在图8b的示例性实施例中所示的圆盘540的对应凹槽中,圆盘540可包括具有对应形状并且被配置成接收圆盘500的突出部522的凹槽552。根据示例性实施例,凹槽552可形成一个或多个销以与齿状物522互相啮合。因此,在一对相邻的圆盘中,第
一圆盘可包括一个或多个突出部(或齿状物),并且第二圆盘可包括被配置成接收一个或多个突出部的一个或多个凹槽(或销)。
83.根据示例性实施例,图8a的示例性实施例的圆盘500的接头结构520可进一步包括突出部524,突出部524被配置成接触相邻圆盘的对应突出部,诸如在图8b的示例性实施例中的圆盘540的突出部554。因此,突出部524可用作相邻圆盘之间的压缩负载承载表面。由于约束缆线与接头结构520分开设置并且背离接头结构520,包括负载承载突出部524,所以接头结构520未被延伸穿过接头结构520的约束缆线孔削弱。因此,接头结构520,包括负载承载突出部524,可制造得更大,这增大了包括像圆盘500那样的圆盘的腕部可适应的负载,从而使腕部更坚固。
84.通过使约束腱沿螺旋路径延伸提供的另一个优点为,当腕部经致动以铰接(例如,弯曲)时,约束腱的长度基本上守恒。当圆盘313、314经致动以在图3中的方向355上相对于彼此围绕轴线354枢转时,约束腱330和约束腱332在圆盘313与圆盘314之间可发生长度变化。例如,当圆盘313和圆盘314在远离腕部310侧面的方向上相对于彼此围绕轴线354旋转时,约束腱330和约束腱332在圆盘313与圆盘314之间可经历正向长度变化,其中约束腱330和约束腱332在圆盘313与圆盘314之间的腕部310的所述侧上。相反,当圆盘313和圆盘314在朝向腕部310侧面的方向上相对于彼此围绕轴线354旋转时,约束腱330和约束腱332在圆盘313与圆盘314之间可经历负向长度变化,其中约束腱330和约束腱332在圆盘313与圆盘314之间的腕部310的所述侧上。当腕部310致动时,其他约束腱在其他圆盘之间经历类似的正向长度变化或负向长度变化。
85.可选择以供约束腱穿过可铰接构件诸如腕部的扭转路径,以解决约束腱的长度变化。根据示例性实施例,被动约束腱可沿腕部的至少一部分沿螺旋路径延伸,从而使约束腱在腕部的整个长度上的长度基本上守恒。约束腱可在不使用致动器诸如力传输机构和控制该致动器的控制算法的情况下被动地约束可铰接构件的移动。例如,在各种示例性实施例中,通过可并未由外部驱动机构或传输机构致动的约束构件可被动地约束关节式连杆结构的圆盘的移动。为实现这一点,被动约束腱可沿螺旋路径延伸,使得当包括约束腱的铰接构件弯曲时,诸如处于俯仰和/或偏航运动中,约束腱在第一对相邻圆盘之间经历正向长度变化或负向长度变化,并且在第二对相邻圆盘之间经历对应的并且相反的负向长度变化或正向长度变化,第二对相邻圆盘基本上抵消了来自第一对相邻圆盘的长度变化。因此,约束腱的长度基本上守恒。进一步地,由于约束腱的端部固定在可铰接构件的相对端部处,这使约束腱的长度固定,所以允许弯曲运动(例如,俯仰和/或偏航运动),因为弯曲运动基本上并不导致约束腱的长度变化。相反,可基本上防止平移运动,诸如将腕部横向移动成s形,因为平移运动并未造成约束腱的长度守恒,但约束腱的固定端部基本上防止了约束腱的长度变化。
86.转向图5的示例性实施例,当圆盘315和圆盘314在约束腱332和约束腱336所位于的腕部310的侧面上在方向357上朝向彼此围绕轴线356旋转时,约束腱332和约束腱336经历负向长度变化。约束腱332和约束腱336沿螺旋路径延伸穿过腕部310,使得约束腱332和约束腱336在圆盘313与圆盘312之间在腕部310的相对侧上延伸,约束腱332和约束腱336在圆盘315和圆盘314之间从腕部310的相对侧延伸。因此,当圆盘313和圆盘312以与圆盘315和圆盘314基本上相同的方式沿方向353围绕轴线352旋转时,约束腱332和约束腱336按照
基本上抵消圆盘315与圆盘314之间的负向长度变化的量在圆盘313与圆盘312之间经历正向长度变化,从而使约束腱332和约束腱336的长度基本上守恒。类似地,当腕部310在相反的方向上致动,使得约束腱332和约束腱336在圆盘315与圆盘314之间经历正向长度变化并且在圆盘313与圆盘312之间经历负向长度变化时,约束腱332和约束腱336的长度仍基本上守恒。约束腱330和约束腱334还可沿螺旋路径延伸,使得约束腱330和约束腱334在圆盘315与圆盘314之间的长度变化基本上抵消约束腱330和约束腱334在圆盘313与圆盘312之间的长度变化。另外,约束腱330、332、334、336沿螺旋路径延伸,使得约束腱330、332、334、336在圆盘314与圆盘313之间的长度变化基本上抵消约束腱330、332、334、336在圆盘312与圆盘311之间的长度变化。
87.根据示例性实施例,如图3所示,当腕部310的弯曲轴线350、352、354、356在不同(例如,正交)的方向上交替时,约束腱332和约束腱336从约束腱332和约束腱336在圆盘315与圆盘314之间的位置(诸如例如,在图3所示的位置370处)处的方位到约束腱332和约束腱336在圆盘313与圆盘312之间的位置(诸如例如,在图3所示的位置372处)处的方位可以螺旋路径在大约180度的角范围内延伸。这样,约束腱332和约束腱336位于腕部310的相对侧上,以有助于使约束腱332和约束腱336的长度守恒。如上所述,约束腱330、332、334、336从圆盘311到圆盘312、从圆盘312到圆盘313等可在大约90度的角范围内以螺旋路径延伸,从而从圆盘311到圆盘313提供具有大约180度总角范围的螺旋路径。类似地,约束腱330和约束腱334从约束腱330和约束腱334在圆盘315与圆盘314之间的位置处的方位到约束腱330和约束腱334在圆盘313与圆盘312之间的位置处的方位可沿具有大约180度角范围的螺旋路径延伸。另外,约束腱330、332、334、336从约束腱330、332、334、336在圆盘313与圆盘314之间的位置处的方位到约束腱330、332、334、336在圆盘312与圆盘311之间的位置处的方位可沿具有大约180度角范围的螺旋路径延伸。
88.根据示例性实施例,通过将约束腱330、332、334、336固定在腕部310的相对端部处,腕部的类似接头的弯曲角度将基本上相同。通过为类似的接头提供具有基本上相同的弯曲角度的腕部,腕部的运动可容易控制并且可以更平滑。根据示例性实施例,当腕部310经致动以朝向其中约束腱332、336在圆盘315与圆盘314之间延伸的腕部310的侧面弯曲时,圆盘315和圆盘314相对于彼此围绕轴线356旋转的程度与圆盘313和圆盘312相对于彼此围绕轴线352旋转的程度基本上相同。这是因为轴线356和轴线352基本上彼此平行。类似地,当腕部310经致动以引起在圆盘311与圆盘312之间围绕轴线350的旋转时,圆盘313与圆盘314也围绕轴线354旋转至基本上相同的程度。
89.根据示例性实施例,腕部的所有约束腱可从远侧圆盘(例如,圆盘311)到近侧圆盘(例如,圆盘315)在相同的周向方向上以螺旋路径延伸。然而,在此示例性实施例中,约束腱中的一个或多个可穿过相邻圆盘之间的一个或多个接头结构,这可导致一个或多个接头结构的削弱。为解决这一点,约束腱可被设定路径以在不同的方向上沿螺旋路径延伸。例如,一个约束腱可沿器械的近侧
‑
远侧方向在右手方向或左手方向上沿扭转路径延伸,并且另一个约束腱可沿器械的近侧
‑
远侧方向在左手方向或右手方向中的另一方向上沿扭转路径延伸。如在图5的示例性实施例中所示,约束腱330在第一方向342上(诸如例如,在远侧方向近侧的左手方向上)沿螺旋路径从圆盘311延伸到圆盘315,并且约束腱334在与第一方向344不同的第二方向344上(诸如例如,在远侧方向近侧的右手方向上)沿螺旋路径从圆盘
311延伸到圆盘315。例如,第一方向342和第二方向344在彼此相反的方向上。通过使约束腱330和约束腱334在相应的方向342和344上沿螺旋路径从圆盘311延伸到圆盘315,约束腱330和334可在圆盘311
‑
315之间延伸,而不穿过接头322、324、326、328中的任何一个。
90.类似地,约束腱332和约束腱336在相应的相反方向344和342上沿螺旋路径从圆盘311延伸到圆盘315,使得约束腱332和336并不物理穿过接头322、324、326、328中的任何一个。根据示例性实施例,约束腱330和336二者的至少一部分在方向342上沿螺旋路径从圆盘311延伸到圆盘315。根据示例性实施例,约束腱334和约束腱332两者的至少一部分在方向344上沿螺旋路径从圆盘311延伸到圆盘315。换言之,当腕部310包括四个约束腱330、332、334、336时,约束腱中的两个可沿方向342沿螺旋路径从圆盘311延伸到圆盘315,而另外两个约束腱可在方向344上沿螺旋路径从圆盘311延伸到圆盘315。
91.在配置约束腱时的一种考虑为约束腱与腕部的部件之间的摩擦的量,摩擦的量可影响腕部的运动,致动腕部所需的动力和/或腕部部件的磨损。例如,在使用多组致动构件来主动约束腕部的腕部中,致动构件通常沿笔直路径延伸穿过器械和腕部,其中当腕部弯曲时,致动构件发生弯曲。考虑到与例如笔直路径相比由于约束腱的螺旋路径而在约束腱与腕部部件之间产生的增加的摩擦量,约束腱可以帮助最小化摩擦的方式沿螺旋路径延伸。
92.根据示例性实施例,与利用多组笔直腱来约束接头运动的常规腕部相比,使约束腱330、332、334、336沿螺旋路径延伸从而当腱在每对圆盘311
‑
315之间横贯时具有大约90度的角范围并不会造成摩擦的显著增加。这是因为尽管约束腱330、332、334、336沿螺旋路径延伸,但可用于确定约束腱330、332、334、336与腕部部件之间的摩擦量的包角并不显著大于用于在常规腕部中约束接头运动的笔直腱的包角。约束腱与其一个或多个支撑表面之间的摩擦可由capstan等式t
负载
=t
保持
e
μφ
,其中t
保持
为施加到腱的张力(诸如预加载张力),μ为腱与一个或多个支撑表面之间的摩擦系数,φ为腱的扭转所扫掠总角度,并且t
负载
为腱与一个或多个支撑表面之间的力。因此,将腱扭转过大角度φ在腱与一个或多个支撑表面之间导致大的t
负载
力。在示例性实施例中,使用在邻近的圆盘311
‑
315中的每个之间具有大约90度角范围的螺旋路径可在例如图5的示例性实施例中所示的三个弯曲位置345、346、347处提供具有例如大约40度至大约70度角范围的包角。
93.本文描述的各种腕部示例性实施例可包括布置成各种配置的圆盘。例如,在图3的示例性实施例中所示的配置可由于轴线350、352、354、356的交替正交方向而被称为“abab”腕部。在其他示例性实施例中,腕部可利用其中圆盘之间的旋转轴线并在正交方向上交替而是遵循“abba”配置的配置,使得两个连续轴线(例如,中间圆盘的轴线)在基本上相同的方向上延伸,并且被在相同方向上延伸但正交于所述两个连续轴线的轴线“挡住(bookened)”。
94.abba配置的作用类似于恒速接头,该恒速接头在滚动运动传输通过腕部时是可期望的。例如,当腕部用于器械中并且将滚动运动输入到器械轴时,滚动运动传输通过腕部,从而使可包括端部执行器的器械的远侧端部也滚动。由于腕部包括一个或多个接头,所以腕部像经由一个或多个接头连接的车辆传动系的输入轴和输出轴一样作用。如本领域技术人员所熟悉的,当车辆传动系的输入轴和输出轴之间存在角度时,在输入轴和输出轴之间发生速度变化,这是不期望的。通过像类似于双万向接头的恒速接头一样作用,其中两个a
接头具有基本上相同的角度,并且两个b接头具有基本上相同的角度,从而导致输入侧和输出侧之间的速度变化基本上抵消,具有abba机构的腕部解决了这种顾虑。因此,对于施加到器械轴的滚动运动,abba腕部可使腕部的输入侧和输出侧之间的速度变化最小化或消除。
95.尽管对于滚动运动而言abba配置使腕部输入侧和输出侧之间的速度变化最小化或消除,但abab配置诸如图3的示例性实施例可用于有利地提供腕部310,与abba配置相比,在腕部310中,约束腱330、332、334、336沿螺旋路径每个圆盘311
‑
315延伸最小量,同时还使约束腱330、332、334、336的长度基本上守恒,并且定位约束腱330、332、334、336,使得约束腱330、332、334、336不穿过连接圆盘的接头。因此,可使用平滑运动获得对腕部310的移动的精确控制,并且连接圆盘311
‑
315的接头可以是小的。
96.尽管具有abab配置的腕部机构提供了在其输入侧和输出侧之间自然地提供速度变化的缺点,但使约束腱沿螺旋路径延伸穿过腕部的至少一部分并且将约束腱固定在腕部的相对端部处提供了至少弥补该缺点的显著优点。进一步地,通过调节到腕部的输入旋转速度以完成滚动的控制系统,可补偿任何速度变化,诸如通过根据腕部的弯曲角度来改变输入速度以补偿速度变化。
97.转向图9,其描绘了利用约束腱的abba腕部的一个示例性实施例。在图9中,腕部600包括布置成abba接头配置的圆盘611
‑
615。具体地,圆盘611与圆盘612之间的接头640可允许圆盘611和圆盘612在方向621上围绕轴线620旋转,圆盘612与圆盘613之间的接头642可允许圆盘612和圆盘613在方向623上围绕轴线622旋转,圆盘613与圆盘614之间的连接部644可允许圆盘613和圆盘614在方向625上围绕轴线624旋转,并且圆盘614与圆盘615之间的连接部646可允许圆盘614和圆盘615在方向627上围绕轴线626旋转。如在图9的示例性实施例中所示,轴线620和轴线626可在基本上相同的方向上延伸,轴线622和轴线624可在基本上相同的方向上延伸,并且轴线620和轴线626可基本上正交于轴线622和轴线624,从而产生abba接头的轴线配置(或者圆盘对的任意俯仰
‑
偏航
‑
偏航
‑
俯仰旋转)。
98.腕部600进一步包括固定在腕部600的相对端部处的约束腱。如在图9的示例性实施例中所示,腕部600包括4个约束腱630、632、634、636,但可使用其他数目的约束腱。与其中约束腱在每对圆盘之间沿具有大约90度角范围的螺旋路径延伸的图3的示例性实施例不同,在图9的示例性实施例中,约束腱630、632、634、636从圆盘611到圆盘612、从圆盘612到圆盘613、从圆盘613到圆盘614以及从圆盘614到圆盘615基本上笔直,但沿具有大约180度角范围的螺旋路径延伸跨过圆盘613,诸如例如,沿扭转路径或另一个路径跨过圆盘613以到达距离180度的点。因此,当腕部600铰接(例如,弯曲)时,约束腱630、632、634、636的长度可守恒。换言之,代替沿对于所有接头而言具有大约90度角范围的螺旋路径延伸,在abba配置中的约束腱可在b类型接头之间沿具有大约180度角范围的螺旋路径延伸并且跨过a类型接头沿具有大约0度角范围的螺旋路径延伸。
99.这在图10中进一步说明,图10为沿图9中的线10
‑
10的横截面图。如图10所示,约束腱630和约束腱632中的每个可跨过圆盘613横贯大约180度的角范围。约束腱634和约束腱636可与约束腱630和约束腱632具有相同的角范围,但在不同的位置处进入和离开圆盘613。由于约束腱630、634和约束腱632、636分别相互交叉,所以在图10的示例性实施例的横截面图中,在相同的位置描述约束腱630、634和约束腱632、636。因此,尽管abba配置对于旋转(滚动)运动而言可使其输入侧与输出侧之间的速度变化最小化,但约束腱仍可穿过腕部
的中心。尽管腕部600可经配置使得约束腱630、632、634、636沿圆盘613的周边延伸的路径成螺旋形扭转,但此设计可不如使路径延伸跨过圆盘613的中心那样实用。
100.例如,当腕部600使用图8a和图8b的示例性实施例的圆盘500和圆盘540时,约束腱可穿过由圆盘的中心孔516提供的中心管腔,因此潜在地妨碍可以其他方式穿过中心管腔的任何致动构件。因此,如果中心管腔可以其他方式接收用于端部执行器的致动构件,则端部执行器致动构件将必须被设定路径穿过不同的管腔,并且当其不位于中心管腔中时可需要不同的设计。进一步地,由于约束腱630、632、634、636的螺旋路径的角范围较大,所以用于约束腱630、632、634、636的包角也较大,这与具有abab配置的腕部相比导致约束腱630、632、634、636之间的摩擦的量更大。具有abab配置的腕部600可用于例如经受相对小负载的相对大直径的器械。根据另一个示例性实施例,约束腱630、632、634、636可经配置沿不穿过中心管腔中心的路径延伸。然而,此实施例可导致约束腱630、632、634、636的包角更大,这可导致约束腱630、632、634、636与圆盘613之间的摩擦增加。
101.尽管图3和图9的示例性实施例描绘了包括4个接头的腕部,但根据本文描述的示例性实施例的腕部和其他关节式连杆结构的可铰接构件并不限于4个接头。例如,腕部和其他可铰接构件可具有2个圆盘、3个圆盘、5个接头、6个接头、8个接头或更多数目的接头。
102.如以上关于图3、图4、图9和图10的示例性实施例所讨论,关节式连杆结构诸如腕部可包括具有腱的一系列连接圆盘,以提供用于约束腕部运动的结构。然而,根据本公开的示例性实施例的用作腕部或另作他用的其他可铰接构件可包括其他结构。转向图11,其示出了可铰接构件700的示例性实施例,其中编织结构710取代圆盘并且形成可铰接构件700的主体。如在本文描述的其他示例性实施例中一样,可铰接构件700可以为腕部,平行运动机构的零件,或器械诸如外科器械的其他可铰接部件。图11示出处于笔直(即,非弯曲)配置中的可铰接构件700。
103.根据示例性实施例,编织结构710可具有限定器械部件的中心通道的中空圆柱体或管状形状。图12示出在图11中的编织结构710的一部分图12的放大视图。如图所示,编织结构710可包括彼此交织的辫状物712。在编织结构710中,辫状物712中的每个形成围绕编织结构710的中心线的螺旋形结构,该中心线在可铰接构件700的近侧端部702与远侧端部704之间延伸,所述中心线限定螺旋轴线。在一方面(未示出),辫状物712中的每个在圆盘721与圆盘722之间的距离内围绕螺旋轴线转动一圈。
104.应当理解,图11和放大视图图12为包括编织结构710的可铰接构件700的侧面示意图。图12示出编织结构710的一部分的放大视图,并且更具体地,示出交织辫状物712的几何关系。径向711和纬向713试图以两个维度表示辫状物712的螺旋角。在图12中所示的编织结构710的一部分为彼此交织的辫状物712的小的、大约平坦的节段。图12中所示的径向711和纬向713示出辫状物相对于假想轴线的近似角度,假想轴线(即,通过使切面与编织结构710的弯曲外表面接触形成的线,其中切面基本上平行于编织结构710的中心线)在编织结构710的外表面上沿器械的长度延伸。在一方面,径向711与假想轴线之间的角度和纬线713与假想轴线之间的角度相同。换言之,与径向711对齐的辫状物712的螺旋角和与纬向713对齐的辫状物712的螺旋角相同,这两组辫状物仅在其螺旋形状的偏手性方面存在不同(例如,辫状物712的一个方向沿右手螺旋方向,而辫状物712的另一个方向沿左手螺旋方向)。此辫状物配置可产生编织结构710,编织结构710围绕其中心线具有基本上对称的弯曲刚度。
105.每个辫状物712可由沿径向711或纬向713延伸的多个丝状体714形成。辫状物712可具有大致矩形的结构,该结构具有基本上平坦的表面,所述表面形成编织结构710的外表面703,如图11和图12所示。然而,辫状物可具有其他形状,诸如圆形横截面、卵形横截面或其他形状。丝状体714可以为例如尼龙单丝或其他柔性且坚固的材料,并且可具有在从例如大约0.008英寸至大约0.012英寸范围内的直径,诸如例如大约0.010英寸。丝状体714可由允许丝状体714为柔性的材料制成,所以当包括编织结构的腕部被致动时,编织结构710可弯曲,但也具有足够的弯曲刚度以在向丝状体714施加压缩负载时使皱曲最小化或防止皱曲。
106.如本文所讨论,通过固定编织结构710的端部,编织结构710可用于约束可铰接构件700的运动。因此,编织结构710可约束可铰接构件700的运动而不是如在图3和图9的示例性实施例中那样使用约束腱来约束可铰接构件700的运动。根据示例性实施例,编织结构710的近侧端部702固定到圆盘721,圆盘721继而可使腕部700连接到其他器械部件,诸如外科器械轴的远侧端部、平行运动机构的远侧端部或其他器械结构(未示出)。类似地,编织结构710的远侧端部704固定到圆盘722,圆盘722继而可使可铰接构件700连接到其他器械部件,诸如端部执行器(未示出)的近侧端部或其他结构。圆盘712、722与可铰接构件的圆盘诸如图3的示例性实施例的腕部300的圆盘311
‑
315的不同之处在于,圆盘721、722诸如经由接头彼此不联接。因此,根据示例性实施例,圆盘721、722可用作腕部的端部,腕部的端部继而可联接到其他器械部件。
107.例如,编织结构710当用作腕部时可为可铰接构件700提供相对平滑的运动,并且制造成本相对较低。进一步地,类似于具有abba配置的腕部结构,编织结构710当经受旋转(滚动)运动时可使其输入侧与输出侧之间的速度变化最小化或消除。可通过例如向致动构件730(例如,可联接到力传输机构或者通过力传输机构致动的牵拉/牵拉或推动/牵拉构件,如以上关于图4的示例性实施例所描述)施加力诸如张力或者压力来致动编织结构710,致动构件730连接到编织结构710的远侧端部704,诸如连接到远侧圆盘722,以使编织结构710并且因此使可铰接构件700沿弧弯曲。
108.根据另一个示例性实施例,编织结构的近侧端部702和远侧端部704无需分别固定到圆盘,而是可在不使用圆盘的情况下直接固定到另一个器械部件。转向图14,其示出包括腕部751的外科器械的远侧部分750的侧视图,腕部751包括形成腕部751的主体的编织结构710。编织结构710可具有关于图11的示例性实施例所讨论的结构和特征。编织结构710的近侧端部702直接固定到外科器械部件572的远侧端部754,远侧端部754可以为例如外科器械轴、平行运动机构的远侧端部或其他器械结构。进一步地,编织结构710的远侧端部704直接固定到端部执行器756的近侧端部758或其他结构。腕部751可包括致动构件760,以通过诸如向致动构件751(例如,牵拉/牵拉或推动/牵拉致动构件)施加力(诸如张力或压力)来铰接腕部751,致动构件760继而连接到端部执行器756的近侧端部758以使腕部751沿弧弯曲。
109.可铰接构件700可包括一个或多个结构以控制编织结构710的直径,使得编织结构710的直径在负载下基本上不收缩或扩张,否则其可影响编织结构710的运动的精确性。如在图11的示例性实施例中所示,可围绕编织结构710的外部表面708提供一个或多个圆盘720,以控制编织结构的外径(即,控制径向方向上的外径)。圆盘720与可铰接构件的圆盘诸如图3的示例性实施例的腕部300的圆盘311
‑
315的不同之处在于,圆盘721、722诸如经由接
头彼此不联接或者不联接到圆盘721或圆盘722。如图11所示,致动构件730可延伸穿过圆盘720中的孔723,以将致动构件730引导至远侧圆盘722。致动构件730还可延伸穿过圆盘721和圆盘722中的孔725。
110.尽管在图11的示例性实施例中示出了两个圆盘720,以有助于观看编织结构710,但也可利用其他数目的圆盘720,诸如例如,1个、3个、4个、5个、6个或更多数目的圆盘。编织结构710可进一步包括内部结构以控制编织结构710的内径。转向图13,其示出了可铰接构件700的横截面图,在编织结构710的内部可提供内部结构740,以控制编织结构710的内径。内部结构740可具有包括中心通道742的中空圆柱体或管的形状,并且可以为例如弹簧或中空管。内部结构740可由金属、塑料或其他足够坚固以抵抗编织结构710的径向变形的材料制成,但也是柔性的,使得内部结构740在可铰接构件700和编织结构710致动和弯曲时可弹性变形。
111.根据示例性实施例,包括编织结构的可铰接构件可使用除圆盘诸如图11的示例性实施例的圆盘720以外的其他结构,以控制编织结构的直径。如在图14的示例性实施例中所示,腕部751可包括围绕编织结构710缠绕的条带762,以控制编织结构710的直径。尽管在图14的示例性实施例中示出两个条带762,但可利用其他数目的条带762,诸如例如,1个、3个、4个、5个、6个或更多数目的圆盘。进一步地,条带762可没有用于致动构件760的通道,致动构件760可在编织结构的近侧端部702与远侧端部704之间延伸越过条带762。因此,如在图14的示例性实施例中所示,具有编织结构710的腕部751可没有固定编织结构710的近侧端部702和远侧端部704的圆盘,和/或控制编织结构710的直径的圆盘。
112.根据示例性实施例,编织结构710可在其近侧端部702与远侧端部704之间沿螺旋路径延伸,诸如在方向706上或者在方向707上。例如,单独的丝状体714可沿螺旋路径延伸。为编织结构710提供预定的螺旋路径可控制编织结构710的dof的数目,并且因此控制编织结构710的运动,以及控制编织结构710如何约束腕部700的运动。例如,归因于单独的丝状体如何相对于沿编织结构710的长度的弯曲轴线定位,控制编织结构710横贯的螺旋路径可影响编织结构710所允许的自由度的数目。
113.根据示例性实施例,编织结构710在近侧端部702与远侧端部704之间可沿具有大约180度角范围的螺旋路径延伸,以提供具有零自由度的编织结构710。例如,丝状体714在近侧端部702与远侧端部704之间可沿具有大约180度角范围的螺旋路径延伸。螺旋路径的180度角范围产生编织结构710,在编织结构710中,当编织结构710移动时,丝状体714的长度并不守恒。由于编织结构710的端部固定并且不允许长度变化,所以基本上防止了弯曲运动和平移运动,否则这些运动就可导致编织结构710的长度变化。具有零自由度的编织结构710可像腕部那样抵抗弯曲,但由于丝状体和/或辫状物在负载下的变形,所以其可弯曲有限的程度。
114.根据另一个示例性实施例,编织结构710可在近侧端部702与远侧端部704之间沿具有大约360度角范围的螺旋路径延伸,以提供具有两个自由度诸如在任意的俯仰和偏航方向上的编织结构710。例如,当丝状体714从近侧端部702横贯(traverse)到远侧端部704时,丝状体714可沿具有大约360度角范围的螺旋路径延伸。通过沿具有大约360度角范围的螺旋路径延伸,编织结构710可像包括具有两个自由度的处于abab配置中的一系列连接圆盘的腕部那样起作用,因为由于弯曲运动长度守恒,可允许在俯仰和偏航方向上的弯曲运
动。相反,由于平移运动可以不是长度守恒的,并且编织结构710的固定端部可基本上防止编织结构710的长度变化,所以可基本上防止平移运动诸如将编织结构710移动成s形。另一方面,由于编织结构710在沿具有大约360度角范围的螺旋路径延伸时仅具有两个自由度,所以编织结构710在x
‑
y空间中的平移运动可受到约束,使得编织结构710可沿弧铰接(例如,像腕部那样),但编织结构710的一部分不可相对于编织结构710的另一部分横向平移(例如,像平行运动机构那样,如以下关于图17的示例性实施例和在公开于2011年5月17日的美国专利no.7,942,868以及提交于2007年6月13日并且公开为美国公开no.us 2008/0065105的美国申请no.11/762,165中所描述)。对于包括编织结构710的腕部,可不期望编织结构710的一部分相对于编织结构710的另一部分进行横向平移移动。
115.根据另一个示例性实施例,编织结构710可在近侧端部702与远侧端部704之间沿具有大约720度角范围的螺旋路径延伸,使得编织结构710的运动基本上是不受约束的。例如,当丝状体714从近侧端部702横贯到远侧端部704时,丝状体714可沿具有大约720度角范围的螺旋路径延伸。延伸大约720度角范围的编织结构可类似于各自沿具有大约360度角范围的螺旋路径延伸的两个连续的编织结构,从而提供具有4个自由度的总体编织结构(对用户来说看起来基本上不受约束)并且允许弯曲移动和平移移动两者。因此,编织结构710不仅可以像腕部那样在任意的俯仰和偏航方向上弯曲,而且编织结构710可移动成为s形或者像平行运动机构那样,如以下关于图17的示例性实施例所描述,使得穿过近侧端部702和远侧端部704中的每个的纵向轴线可彼此偏移但仍基本上彼此平行。
116.当编织结构710用于可铰接构件700中时,编织结构710可用于取代一系列在接头处连接的圆盘,如在图11的示例性实施例中所示。换言之,编织结构710本身可从一端到另一端提供可铰接构件700的结构和主体。在此示例性实施例中,可铰接构件700可用作腕部,并且具有与在以上示例性实施例中所讨论的腕部结构相同的直径。进一步地,编织结构710可具有扭转刚度和压缩刚度两者,并且可在张力和压力下进行放置。
117.尽管编织结构710可用于取代连接圆盘并且提供具有受约束运动的腕部,如在图11的示例性实施例中所示,但编织结构也可与连接圆盘结合使用以提供具有受约束运动的替代可铰接构件(例如,腕部)。在这种情况下,编织结构可取代约束腱,诸如图3的示例性实施例的约束腱330、332、334、336。转向图15,其示出包括连接圆盘801
‑
805和编织结构810的可铰接构件800的侧视图。圆盘801
‑
805可以与图3的示例性实施例相同的方式进行连接和配置(即,以abab配置并且在图15中示出)。为约束圆盘801
‑
805的运动,诸如允许沿弧进行受控弯曲,可围绕圆盘801
‑
805的外部提供编织结构810,如在图14的示例性实施例中所示。编织结构810可根据图11的示例性实施例进行配置,并且包括形成交织辫状物712的丝状体714,以围绕圆盘801
‑
805形成总体的中空圆柱体或管状结构。编织结构810的近侧端部810和远侧端部814可相对于圆盘801
‑
805固定。根据示例性实施例,编织结构810的近侧端部810和远侧端部814可被固定以在张力下放置编织结构810,其中圆盘801
‑
805承载压缩负载。进一步地,根据示例性实施例,通过围绕圆盘801
‑
805的外部放置编织结构810,可通过圆盘801
‑
805本身控制编织结构810的内部直径。
118.如在图3至图15的示例性实施例中所述,具有受约束运动的可铰接构件可以为腕部。然而,具有受约束运动的可铰接构件并不限于腕部。根据示例性实施例,具有受约束运动的可铰接构件可以为平行运动机构,其功能在例如公开于2011年5月17日的美国专利
no.7,942,868和公开于2008年3月13日的美国公开no.us 2008/0065105中有所描述,所述专利以引用的方式全文并入本文。
119.参考图16,其示出外科器械的远侧部分900,远侧部分900包括连接到器械轴906的平行运动机构910。根据图2的示例性实施例,该器械可以为相机器械或具有端部执行器908的外科器械。根据示例性实施例,器械远侧部分900可包括例如腕部902,腕部902可根据上述示例性实施例中的任何一个进行配置,但器械也可没有腕部902。
120.如在图16的示例性实施例中所示,平行运动机构910可包括将近侧接头机构912与远侧接头机构914分开的笔直轴节段916。与公开于2011年5月17日的美国专利no.7,942,868和公开于2008年3月13日的美国公开no.us2008/0065105的示例性实施例类似,接头机构912和接头机构914以及笔直节段916的相对端部联接在一起,以便彼此协作进行操作。根据示例性实施例,近侧接头机构912和远侧接头机构914类似于腕部可包括多个连接圆盘。圆盘可包括例如机械止动件(未示出),以限制接头机构912、914的运动,诸如在俯仰和/或偏航方向上的运动。
121.图20示出用于平行运动机构的接头机构的圆盘1100的示例性实施例的端视图。圆盘1100可包括中心孔1102、连接部分1104和用于致动构件的多个孔。例如,圆盘1100可包括用于腕部驱动腱的多个孔1110,用于平行运动机构驱动腱的多个孔1120,以及用于约束腱的多个孔1130,以下将进一步对这些孔进行讨论。如在图20的示例性实施例中所描绘,孔1110、1120、1130可关于圆盘1100的中心(例如,中心孔1102的中心)位于相同距离(例如,半径)处,或者孔1110、1120、1130可关于圆盘1100的中心位于不同距离(例如,半径)处。
122.图17示出图16的示例性实施,其中平行运动机构910被致动。如图16所示,平行运动机构910可控制平行运动机构910的远端部分917和平行运动机构910的近端部分915的相对取向。因此,穿过平行运动机构910的远端部分917的纵向轴线913可基本上平行于穿过平行运动机构910的近侧端部915的纵向轴线911(纵向轴线911还可以为器械轴906的纵向轴线(未在图16中示出))。因此,端部执行器908、相机设备(未示出)或在器械远侧部分900的远侧端部904处的其他部件可在x
‑
y空间中变化,但可维持端部执行器908相对于纵向轴线911的取向(在由于腕部902所导致的任何运动被解决之前)。
123.与可受到约束而基本上遵循弧的腕部运动不同,平行运动机构910的运动可受到约束以使平行运动机构910在x
‑
y空间中平移,如在图16的示例性实施例中所示。由于沿弧通过近侧接头912到远侧接头914的运动可以不使平行运动机构910的远端部分917在x
‑
y空间中平移,同时维持远端部分917相对于近侧端部915的取向,所以可约束平行运动机构910的运动使得最小化或防止沿弧的运动。因此,可以与图3至图15的示例性实施例的腕部基本上相反的方式来约束平行运动机构910。即,腕部可受到约束以允许沿弧的弯曲运动但最小化或防止在x
‑
y空间中的可导致s形等的平移运动,而平行运动机构可受到约束以允许在x
‑
y空间中的平移运动但最小化或防止沿弧的弯曲运动。
124.转向图18,其示出图16的示例性实施例,其中轴906和平行运动机构910的笔直节段916的外部表面被移除以显示内部部件。如在图18的示例性实施例中所示,笔直节段916可包括在近侧接头机构912和远侧接头结构914之间延伸的中心管918。中心管918可以为中空的,从而允许器械的部件穿过中心管918的内部,诸如到腕部902和/或端部执行器908。
125.如在图18的示例性实施例中所示,腕部驱动腱920可从轴906和平行运动机构910
延伸到腕部902,其中腕部驱动腱920可附接到腕部902的远侧端部或器械远侧部分900的远侧端部904,以致动腕部902,如以上关于图3的示例性实施例所讨论。腕部驱动腱920可在中心管918的外表面上方延伸,如在图18的示例性实施例中所示。根据示例性实施例,腕部驱动腱920可穿过在笔直节段916的中心管918与外部壳体919(在图16和图17中示出)之间提供的环形空间。
126.器械进一步包括一个或多个腱,以致动平行运动机构910。例如,平行运动机构致动构件930可从轴906延伸穿过平行运动机构910,并且固定到平行运动机构910的远侧端部914,使得平行运动机构910可通过诸如向腱930施加力而致动。根据示例性实施例,致动构件930可以为牵拉/牵拉致动构件或推动/牵拉致动构件。由于平行运动机构内的内部空间量的限制,一些平行运动机构可使用3个驱动腱来致动平行运动机构。然而,本文描述的示例性实施例的平行运动机构可由于其配置而提供增加的内部空间量,从而允许使用各种数目的驱动腱。例如,可使用4个致动构件930来致动平行运动机构910,其中类似于图4的示例性实施例的致动构件364,致动构件930成对布置成例如连接到绞盘,这提供了用于致动驱动腱和平行运动机构910的稳健构造和控制。致动构件930可在中心管918上方延伸。根据示例性实施例,致动构件930可穿过在笔直节段916的中心管918与外部壳体919之间提供的环形空间。
127.根据示例性实施例,平行运动机构910可进一步包括固定在平行运动机构910的相对端部处的一个或多个约束构件。例如,约束腱940可从平行运动机构910的远侧端部915延伸到近侧端部917,其中约束腱940固定在远侧端部915和近侧端部917处。可经由例如将约束腱940焊接到平行运动机构910的部件,将约束腱940压接到另一个物体,或者通过本领域技术人员熟悉的其他技术而将约束腱940固定在适当位置。在图18的示例性实施例中,约束腱940的远侧端部固定到远侧接头机构914的圆盘并且固定到近侧接头机构912的圆盘。如图18的示例性实施例所示,约束腱940的一端可通过远侧夹具941固定在平行运动机构910的远侧端部917处,而约束腱940的另一端可通过近侧夹具943固定在平行运动机构910的近侧端部915处。如在图18的示例性实施例中所示,约束腱940可在中心管918的外表面上方延伸。根据示例性实施例,约束腱940可穿过在笔直节段916的中心管918与外部壳体919(在图16和图17中示出)之间提供的环形空间。
128.尽管本文描述的示例性实施例的平行运动机构与在公开于2011年5月17日的美国专利no.7,942,868和公开于2008年3月13日的美国公开no.us2008/0065105中描述的实施例具有类似的运动和功能,但本文描述的示例性实施的平行运动机构具有不同的结构,该结构可为更多的部件诸如驱动腱和/或约束腱提供更多的内部空间,以及提供平行运动机构的平滑的、精确的运动。
129.根据示例性实施例,平行运动机构910不包括在美国专利no.7,942,868中描述的刚性支架1670,从而在平行运动机构910内产生更多的内部空间。尽管在美国专利no.7,942,868中描述的刚性支架1670占用一些内部空间,但刚性支架1670的配置增大了施加到连接到支架1670的致动缆线1680的拉力,其中约束缆线和致动缆线两者均笔直延伸穿过平行运动机构。为解决这一点,平行运动机构910的致动构件930可沿平行运动机构910的至少一部分沿螺旋路径延伸。这在图19的示例性实施例中进一步加以说明,图19示出具有腕部驱动腱1020、约束腱1040和平行运动机构驱动腱1032、1034、1036、1038的平行运动机构的
中心管1018。如图19所示,腕部驱动腱1020和约束腱1040可基本上笔直,而平行运动机构驱动腱1032、1034、1036、1038围绕中心管1018以螺旋路径延伸。根据示例性实施例,平行运动机构驱动腱1032、1034、1036、1038可沿中心管1018沿具有大约180度角范围的螺旋路径延伸,如图19所示。例如,在图18中的平行运动机构的腱930,包括平行运动机构驱动腱934,可沿具有大约180度角范围的螺旋路径从平行运动机构910的近侧端部915延伸到平行运动机构910的远侧端部917。
130.由于平行运动机构致动构件可沿平行运动机构的至少一部分沿螺旋路径延伸,所以可在不使用在其他平行运动机构设计中采用的刚性支架和机构的情况下为腱提供机械优点。例如,当平行运动机构910如图17所示被致动时,平行运动机构驱动腱934在近侧端部915处的平行运动机构910的底侧950上,从而引起驱动腱934的正向长度变化并且使附加张力施加到驱动腱934上。然而,由于相同的驱动腱934沿具有大约180度角范围的螺旋路径延伸,所以驱动腱934在远侧端部917处的平行运动机构910的顶侧954上,从而使驱动腱934在远侧端部917处也经历正向长度变化,这也在驱动腱934上施加张力。因此,致动构件930,包括腱934可沿平行运动机构910沿螺旋路径延伸,以提供用于致动平行运动机构910的机械优点,同时也可通过消除其他内部结构支撑元件产生更多用于部件的内部空间。
131.与致动构件930相比,约束腱940在它们延伸穿过平行运动机构910时遵循基本上笔直的路径,如在图18的示例性实施例中所示。因此,当平行运动机构910如图17所示被致动时,在近侧接头机构912的底侧950上的约束腱940经历正向长度变化。由于约束腱940固定在平行运动机构910的相对端部处,所以沿平行运动机构910的底侧笔直行进的相同约束腱940在远侧接头机构914的底侧952上经历负向长度变化,从而使远侧接头机构914和近侧接头机构912以相反的方式弯曲以提供平行运动机构910的远侧端部917和近侧端部915的偏移但平行的定位。
132.如在图16至图20的示例性实施例中所描述,平行运动机构可使用腱作为约束平行运动机构的运动的机构。在其他示例性实施例中,平行运动机构可包括编织结构,如在图11至图15的示例性实施例中所描述。根据示例性实施例,编织结构可以如关于图11的示例性实施例所述的方式取代平行运动机构910的近侧接头机构912和远侧接头机构914中的圆盘。在另一个示例性实施例中,编织结构可围绕近侧接头机构912和远侧接头机构914的圆盘放置,如关于图15的示例性实施例所描述。
133.尽管根据本文描述的示例性实施例的腕部和平行运动机构可分开使用(即,器械可包括腕部或平行运动机构),但器械可包括腕部和平行运动机构两者。当器械包括腕部和平行运动机构两者时,腕部可包括约束机构诸如约束腱,该约束机构可与平行运动机构的约束机构诸如约束腱分开。例如,腕部包括第一约束机构,诸如第一组一个或多个约束腱,并且平行运动机构包括第二约束机构,诸如第二组一个或多个约束腱。根据示例性实施例,当腕部和平行运动机构具有分开的约束腱时,腕部和平行运动机构的约束腱可不同,诸如例如具有不同的直径,或者其他结构差异或材料差异,这些可经选择以实现期望的运动效应。
134.根据另一个实施例,腕部和平行运动机构使用相同的约束机构,诸如相同的约束腱。在腕部和平行运动机构中使用相同的约束机构可有效地节约对于腕部和平行运动机构两者使用相同约束机构的器械的内部空间。
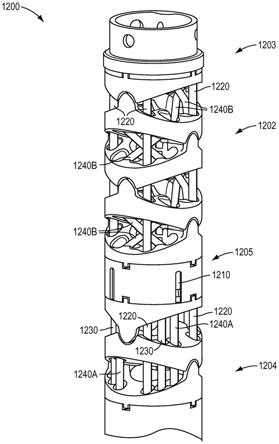
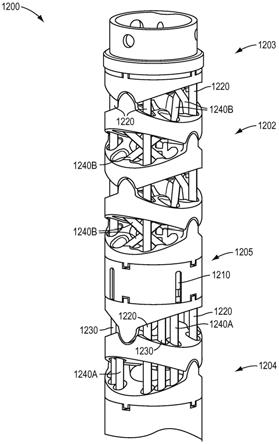
135.参考图21,其示出器械的远端部分1200的局部视图,远端部分1200包括腕部1202和平行运动机构1204,腕部1202和平行运动机构1204可根据图16至图20的示例性实施例进行配置。腕部1202可根据图3至图14的示例性实施例进行配置,并且平行运动机构1204可根据图15至图19的示例性实施例进行配置。如图21所示,腕部1202可位于平行运动机构1204的远侧。腕部驱动腱1220可延伸穿过平行运动机构1204到达腕部1202,并且延伸穿过腕部1202到达腕部1202的远侧端部或器械的远侧端部1203,其中腕部驱动腱1220被固定以致动腕部1202。平行运动机构驱动腱1230延伸穿过平行运动机构1204,并且可固定在平行运动机构1204的远侧端部处。
136.根据示例性实施例,腕部1202和平行运动机构1204共享约束腕部1202和平行运动机构1204两者的运动的约束腱。例如,用于腕部1202和平行运动机构1204两者的约束腱包括约束腱的第一部分1240a和约束腱的第二部分1240b,第一部分1240a延伸穿过平行运动机构1204,被固定(经由诸如以下讨论的夹具1210固定在诸如例如平行运动机构1204的远侧端部处,腕部1202的近侧端部处或者固定在平行运动机构1204和腕部1202之间),第二部分1240b延伸穿过腕部1202并且被再次固定。第一部分1240a和第二部分1240b具有相同的连续约束腱,使得相同的约束腱(部分1240a、1240b)可用于约束腕部1202和平行运动机构1204两者。例如,约束腱可固定在平行运动机构1204的远侧端部处、腕部1202的近侧端部处或者在腕部1202与平行运动机构1204之间的连接区域1205中,如在图21的示例性实施例中所示。因此,一组约束腱(包括部分1240a、1240b)可用于约束腕部1202和平行运动机构1204两者的运动,这提供了器械内部空间的有效使用。
137.根据示例性实施例,腕部1202和平行运动机构1204具有分开的约束腱,所述分开的约束腱分别约束腕部1202和平行运动机构1204的运动。例如,约束腱的第一部分1240a表示第一组一个或多个约束腱,并且约束腱的第二部分1240b表示与约束腱的第一部分1240a分开的第二组一个或多个约束腱。当腕部1202和平行运动机构1204具有不同的约束腱时,用于平行运动机构1204的约束腱(例如,第一部分1240a)可固定在例如平行运动机构1204的远侧端部处、腕部1202的近侧端部处或者平行运动机构1204与腕部1202之间,并且用于腕部1202的约束腱(例如,第二部分1240b)可固定在例如平行运动机构1204的远侧端部处、腕部1202的近侧端部处或者平行运动机构1204与腕部1202之间,延伸穿过腕部1202,并且固定在腕部1202的远侧端部处。
138.根据图3至图20的示例性实施例,约束腱可被固定。例如,约束腱的第一部分1240a可延伸穿过平行运动机构1204,穿过相对于器械远侧部分1200固定约束腱1240的夹具1210,并且终止于夹具,其中约束腱的第二部分1240b分开地延伸穿过腕部1202(诸如当分开的腱约束腕部1202和平行运动机构1204时),或者约束腱可从夹具1210继续穿过腕部1202,作为延伸穿过平行运动机构1204和腕部1202两者的相同约束腱的第二部分1240b。进一步地,约束腱可根据图3至图20的示例性实施例进行布置,其中例如约束腱(例如,部分1240a、1240b)在基本上笔直的方向上延伸穿过平行运动机构1204并且沿螺旋路径延伸穿过腕部1202的至少一部分。
139.本文描述的示例性实施例和方法已经被描述为与用于远程操作外科系统的外科器械一起使用。然而,本文描述的示例性实施例和方法可与其他外科设备一起使用,诸如腹腔镜器械和其他手动(例如,手持)器械,以及非外科设备,诸如包括各种致动的可铰接构件
中的任何一种的设备,无论所述设备是否是远程操作、远程控制或手动操作的,可铰接构件包括但不限于腕部和/或平行运动机构。
140.通过提供具有根据本文描述的示例性实施的约束机构的外科器械,提供具有易于控制并且制造成本较少的较简单的力传输机构的可铰接构件,同时所述可铰接构件提供基本上可重复的、平滑的、精确的运动。
141.鉴于本文的公开内容,进一步的修改和替代实施例对本领域的普通技术人员而言将是显而易见的。例如,系统和方法可包括为使操作清楚而从附图和说明书中省略的附加部件或步骤。因此,本说明书被解释为仅为示例性的,并且用于教导本领域技术人员执行本教导的通用方式。应当理解,本文所示和描述的各种实施例应被视为示例性的。元件和材料以及那些元件和材料的布置可替代本文说明和描述的那些,部件和过程可被颠倒,并且本教导的某些特征可被独立使用,所有这些对于从本文描述获益之后的本领域技术人员而言将是显而易见的。不脱离本教导和随附权利要求的精神和范围的情况下,可对本文描述的元件做出改变。
142.应当理解,本文阐述的特定示例和实施例为非限制性的,并且在不脱离本教导的范围的情况下可对结构、尺寸、材料和方法做出修改。
143.通过考虑本说明书以及本文公开的本发明的实践,根据本公开的其他实施例对本领域的技术人员而言将是显而易见的。本说明书和示例旨在被认为仅是示例性的,其中本说明书和示例的真实范围和精神由随附权利要求指示。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。