1.本发明涉及一种在弱引力小天体表面弹跳移动过程中通过势函数制导,从而实现对探测器轨迹进行修正的控制方法,属于深空探测领域。
背景技术:
2.继月球、行星探测之后,对于小行星着陆探测逐渐成为深空探测的热门领域。目前对于小行星的探测主要有三种方案:通过地面观测站进行观测研究,发射探测器对小行星进行近距离环绕飞行探测或者飞跃观测,以及发射探测器对小行星表面进行着陆探测。随着技术的进步,表面软着陆与采样返回的小行星探测任务正成为探测小行星的主要方式。与行星表面环境不同的是,小行星的重力极其微小,表面环境复杂多变,使得传统的轮式行星探测器在其表面的行走和控制变得极其困难,目前国际上认可的一种表面移动方式为弹跳移动。弹跳移动具有可越过障碍物、能在短时间内实现长距离移动等优点,但同时较小的起跳初始状态偏差就可能造成较大的移动终点位置偏差。因此,需要研究在探测器弹跳过程中进行轨迹修正的方法,以实现探测器表面移动的精确控制。
3.在已发展的小天体表面移动探测制导方法研制中,在先技术[1](参见bellerose j,scheeres d j.dynamics and control for surface exploration of small bodies[c].aiaa/aas 2008astrodynamics specialist conference,honolulu,hawaii,aug.18
‑
21,2008:aiaa 2008
‑
6251.)针对小天体表面弹跳移动问题,基于抛物运动模型设计了制导算法,但是该方法基于简化运动模型,因此控制精度较差。
[0004]
在先技术[2](参见shen h,zhang t,li z,li h.multiple
‑
hopping trajectories near a rotating asteroid[j].astrophysics and space science,2017,362:45.)运用粒子群优化算法研究了弹跳式探测器在小天体表面移动的轨迹优化问题,该方法虽然采用了精确动力学模型,但基于优化方法进行推力设计是一种开环思想,受外部干扰和不确知动力学特性影响较大。
[0005]
在先技术[3](参见刘延杰.小天体附着探测轨迹优化与制导方法研究[d].北京理工大学,2017.),通过设计二阶滑模面,实现对一阶滑模面的跟踪,并利用二阶滑模面推导制导加速度的解析表达式,利用得到的制导加速度即实现探测器单次弹跳的精确转移。但该方法未提到对于障碍物的处理方法,且需要使用多次脉冲来修正轨迹,无法应对误差较大的轨迹修正情况。
技术实现要素:
[0006]
针对现有的小天体表面弹跳移动轨迹修正方法,没有考虑在弹跳过程中位置误差较大时进行脉冲速度机动以及对障碍物的处理,只能进行微小位置偏差的修正。本发明公开的弱引力小天体表面弹跳轨迹修正控制方法主要解决的是:探测器在起跳后因速度误差导致轨迹偏差较大时,将采取脉冲机动的方式对轨迹进行修正,通过引入表示障碍物的修正斥力势函数与引力势函数叠加获得修正势函数,通过所述修正势函数获取脉冲机动速
度,探测器通过所述制动速度脉冲进行弱引力小天体表面弹跳轨迹修正控制,从而提高探测器移动的位置精度。
[0007]
本发明是通过下述技术方案实现的。
[0008]
本发明公开的弱引力小天体表面弹跳轨迹修正控制方法,针对探测器单次弹跳移动问题,分别建立探测器在小天体固连坐标系和小天体表面坐标系下起跳后的动力学方程。考虑探测器在起跳过程中受到的外界干扰因素,得到包含未知干扰的探测器实际弹跳轨迹动力学方程。通过无干扰动力学模型得到标称轨迹,给出一个轨迹误差范围内允许的最大位置偏差,通过同一时刻探测器实际运动轨迹与参考轨迹的位置差值判断探测器是否需要进行轨迹修正。当探测器需要进行轨迹修正时,利用人工势函数制导法进行路径规划。建立关于探测器相对于碰撞点位置的势函数,用具有高势场值的斥力势函数表示探测器标称轨迹范围内的球形障碍物,将两个势函数叠加获得修正势函数。通过调整方向矩阵的参数改变探测器下降路径的方向,保证探测器到碰撞点的过程中,势场值逐渐减小。通过对势函数求导获得制动后的探测器脉冲机动速度与势函数的关系,以制动后的脉冲机动速度和制动时刻的位置作为探测器制动后的初始状态,以经过剩余时间最终到达碰撞点处势场值最小为性能指标设计制导方法,进而得到探测器在弱引力小天体表面弹跳修正轨迹,提高移动的位置精度。
[0009]
本发明公开的弱引力小天体表面弹跳轨迹修正控制方法,包括如下步骤:
[0010]
步骤1:分别建立在小天体固连坐标系和表面坐标系下的动力学方程,考虑探测器在起跳过程中受到的外界干扰因素,得到包含未知干扰的探测器实际弹跳轨迹动力学方程。
[0011]
针对探测器的单次弹跳移动问题,在小天体固连坐标系下,探测器在起跳后的动力学方程表示为
[0012][0013]
其中,r
b
、v
b
分别为探测器的位置和速度矢量,ω为小天体的自旋角速度,a
b
为其他未考虑摄动力的加速度,v为引力势函数。
[0014]
在表面坐标系下,探测器的动力学方程为
[0015][0016]
其中,r、v分别为探测器的位置和速度矢量,ρ为表面坐标系原点相对小天体中心的位置矢量,u
b
为探测器本体坐标系的推力矢量,为从本体坐标系转换到表面坐标系的矩阵,a为其他未考虑摄动力的加速度。
[0017]
考虑到探测器的动力学模型存在各种不确定性,所述不确定性形成因素包括模型参数误差、未知的高阶引力场模型、未建模摄动力,所述不确定性形成因素导致的动力学变化归结为无模型加速度。
[0018]
令对动力学方程积分得
[0019][0020]
其中,n
i
(i=r,v)为未知干扰量。
[0021]
步骤2:对小天体表面坐标系下的动力学方程进行线性化求解,得到制动时间与制动速度的关系。
[0022]
选取探测器在小天体表面坐标系下的位置、速度为状态变量,即
[0023][0024]
在初始状态x0处对动力学方程(1)进行线性化,得到探测器弹跳运动的线性化方程
[0025][0026][0027]
其中
[0028][0029][0030][0031]
与分别为引力位函数在初始状态x0处对位置r的一阶导数与二阶导数。
[0032]
探测器弹跳运动的线性化系统(5)为线性定常系统,该系统的解为
[0033][0034]
由于u为常值矩阵,且矩阵是可逆的,因此
[0035][0036]
系统的解表示为
[0037]
x(t)=e
(a δ)t
x0 (a δ)
‑1[e
(a δ)t
‑
i6×6]u(12)
[0038]
推力器制动时间为t
s
,制动前的探测器速度为v
‑
,制动后探测器速度为v
,探测器状态转移矩阵为
[0039][0040]
常值向量为
[0041][0042]
则所需的速度脉冲为
[0043]
δv=v
‑
v
‑
(15)
[0044]
即通过式(12)(13)(14)(15)建立的制动时间与制动速度的关系。
[0045]
步骤3:建立关于探测器相对于碰撞点位置的引力势函数;同时用具有高势场值的斥力势函数表示在探测器标称轨迹范围内的球形障碍物。通过对所述斥力势函数修正,使其满足李雅普诺夫稳定性条件,进而使斥力势函数在碰撞点处收敛。将引力势函数和修正后的斥力势函数叠加获得修正势函数。
[0046]
选取引力势函数为
[0047][0048]
其中,
[0049][0050]
r
l
为探测器在小天体表面坐标系下相对碰撞点的位置,用探测器在小天体表面坐标系内的位置r表示为
[0051]
r
l
=r
‑
r
t
(18)
[0052]
其中r
t
为小天体表面坐标系内碰撞点的位置。定义的引力势函数为探测器位置的函数,且该势函数是正定的,当且仅当在r=r
t
即探测器到达碰撞点时,引力势函数为零。
[0053]
矩阵m决定了探测器跳向着陆点的方向,为了保证在与碰撞点等距离的点中,距探测器制动点与目标点连线越近的点,势场值越低,选取参数为
[0054]
k
x
=k
y
=k>1(19)
[0055]
引入具有高势函数的区域表示运动路径的限制条件,探测器弹跳路径上存在球形
障碍物,高值势函数区域的梯度值表示施加在探测器上规避障碍物的斥力大小,选取高斯函数形式的斥力势函数为
[0056][0057]
其中r
o
为小天体表面坐标系内障碍物球心的位置矢量,λ1、λ2为斥力势的高和宽。考虑到当r=r
t
时,式(20)不为零,不满足李雅普诺夫稳定性条件。为了使加入斥力势能后的势函数在碰撞点处收敛,将式(20)修正为
[0058][0059]
其中
[0060][0061]
p
x
>1,p
y
>1,p
z
>1(23)
[0062]
则修正后的势函数为
[0063][0064]
步骤4:通过给出探测器机动位置判断条件和制动后的期望速度,代入步骤3中的修正势函数求得制动后脉冲机动速度的大小。
[0065]
当探测器的实际轨迹与参考轨迹误差值大于允许最大误差时,即δr=||r
‑
r
e
||≥r
max
时,发动机点火对探测器进行制动控制,选取制动后的期望速度为
[0066][0067]
式(24)对时间的一阶导数为
[0068][0069]
将式(25)带入式(26),得
[0070][0071]
k为制动后探测器脉冲机动速度的大小,选取k>0,则可以保证在本次制动后势函数对时间的导数是负定的。已知势函数为正定的,依据李亚普诺夫稳定定理,式(25)中确定的速度方向保证探测器位置最终收敛到期望的末端状态,即预定的目标碰撞点。
[0072]
步骤5:以探测器制动后经过剩余时间t
go
最终到达的目标点处势场值φ
f
最小为性
能指标,通过步骤3中建立的修正势函数,确定本次制动后探测器脉冲机动速度的大小k,进而获得探测器进行轨迹修正所需的制动速度脉冲,探测器通过所述制动速度脉冲进行弱引力小天体表面弹跳轨迹修正控制,从而提高探测器移动的位置精度。
[0073]
以探测器通过本次制动后,在不受控制力的作用下,经过剩余时间t
go
最终到达的目标点处势场值φ
f
最小为性能指标,即
[0074][0075]
确定本次制动后探测器脉冲机动速度的大小k,其中剩余时间t
go
是探测器由当前状态到完成整个弹跳过程所花费的时间。
[0076]
制动后探测器的状态为
[0077][0078]
则由φ
f
最小的必要条件
[0079][0080]
结合线性化模型(5),求得k的唯一解
[0081][0082]
式中a
i
为制动时间t
s
的函数,其表达式如下:
[0083]
若i=1,2,3
[0084][0085]
若i=4,5,6
[0086][0087]
由于
[0088][0089]
因此式(31)给出的k值是在给定条件下,使碰撞点处势场值φ
f
最小的制动后探测器脉冲机动速度大小。则通过式(25)确定需要的制动速度脉冲为
[0090][0091]
探测器通过所述制动速度脉冲δv进行弱引力小天体表面弹跳轨迹修正控制,从而提高探测器移动的位置精度。
[0092]
有益效果:
[0093]
1、针对现有的小天体表面弹跳移动轨迹修正方法,没有考虑在弹跳过程中位置误
差较大时进行脉冲速度机动以及对障碍物的处理,只能进行微小位置偏差的修正。本发明公开的弱引力小天体表面弹跳轨迹修正控制方法,将人工势函数制导方法引入弱引力小天体表面弹跳轨迹修正控制,考虑在弹跳过程中位置误差较大时进行脉冲速度机动以及对障碍物的处理,能够采取脉冲机动的方式实现小天体表面弹跳轨迹修正,提高轨迹修正效率。
[0094]
2、本发明公开的弱引力小天体表面弹跳轨迹修正控制方法,探测器在起跳后因速度误差导致轨迹偏差较大时,将采取脉冲机动的方式对轨迹进行修正,通过引入具有高势场值的障碍物势函数与引力势函数叠加获得修正势函数,通过所述修正势函数获取脉冲机动速度,探测器通过所述制动速度脉冲进行弱引力小天体表面弹跳轨迹修正控制,从而提高探测器移动的位置精度。
[0095]
3、本发明公开的弱引力小天体表面弹跳轨迹修正控制方法,用具有高势场值的斥力势函数表示在探测器标称轨迹范围内的球形障碍物,通过对所述斥力势函数修正使其满足李雅普诺夫稳定性条件,进而使斥力势函数在碰撞点处收敛,并使引力势函数和修正后的斥力势函数叠加获得的修正势函数在碰撞点处收敛,提高弱引力小天体表面弹跳轨迹修正控制精度。
附图说明
[0096]
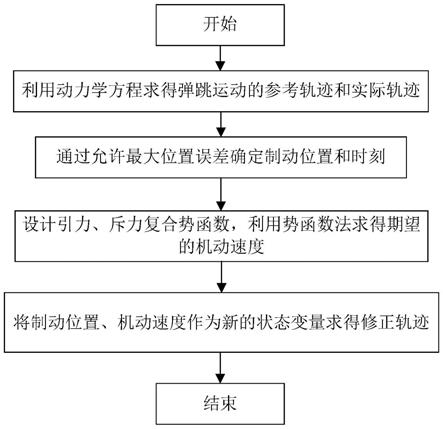
图1是本发明的弱引力小天体表面弹跳轨迹修正控制方法流程示意图;
[0097]
图2是本发明实例中的探测器弹跳过程的标称轨迹、实际轨迹与修正轨迹的示意图;
[0098]
图3是本发明实例中进行300次蒙特卡洛仿真获得的实际轨迹误差与修正后轨迹误差分布示意图。
具体实施方式
[0099]
为了更好的说明本发明的目的和优点,下面结合附图和实例对发明内容做进一步说明。
[0100]
如图1所述,本实施例公开的弱引力小天体表面弹跳轨迹修正控制方法,具体实现步骤如下:
[0101]
步骤1:分别建立在小天体固连坐标系和表面坐标系下的动力学方程,考虑探测器在起跳过程中受到的外界干扰因素,得到包含未知干扰的探测器实际弹跳轨迹动力学方程。
[0102]
采用三轴椭球模型构造小行星,其自旋角速度为1.407
×
10
‑4rad/s,引力系数的确定精度为0.0015
×
105m3/s2,引力位函数各阶系数存在5%的不确知性,将各外界影响的速度误差用正态分布的随机数表示。以探测器初始起跳位置为原点建立表面坐标系,初始起跳位置为r0=[0,0,0]
t
m,初始起跳速度为v0=[2,3,2]
t
m/s,预测一次跳跃运动的时间为40s,小天体理想引力加速度为g=0.1m/s2。将初始条件带入不含误差的动力学方程式(36)中,求得探测器目标点位置为r
t
=[80,120,0]
t
m。
[0103][0104]
考虑到探测器的动力学模型存在各种不确定性,所述不确定性形成因素包括模型参数误差、未知的高阶引力场模型、未建模摄动力,所述不确定性形成因素导致的动力学变化归结为无模型加速度。
[0105]
令式(37)带入初始状态值对动力学方程积分得到探测器实际碰撞位置为r
n
=[78.2417,106.6747,0]
t
m。
[0106][0107]
其中,n
i
(i=r,v)为未知干扰量。
[0108]
步骤2:对小天体表面坐标系下的动力学方程进行线性化求解,得到制动时间与制动速度的关系。
[0109]
选取探测器在小行星表面坐标系下的位置、速度为状态变量,即
[0110][0111]
在初始状态x0=[0,0,0,2,3,2]
t
处对动力学方程(36)进行线性化,得到探测器弹跳运动的线性化方程
[0112][0113][0114]
其中
[0115][0116]
[0117][0118]
与分别为引力位函数在初始状态x0处对位置r的一阶导数与二阶导数。
[0119]
探测器弹跳运动的线性化系统(39)为线性定常系统,该系统的解为
[0120][0121]
由于u为常值矩阵,且矩阵是可逆的,因此
[0122][0123]
系统的解表示为
[0124]
x(t)=e
(a δ)t
x0 (a δ)
‑1[e
(a δ)t
‑
i6×6]u (46)
[0125]
当探测器的实际轨迹与参考轨迹误差值大于允许最大误差时,即δr=||r
‑
r
e
||≥r
max
时,发动机点火对探测器进行制动控制,其中,r
max
=3.5m,推力器制动时间为t
s
=3.5s,制动前的探测器速度为v
‑
=[2.1638,2.9501,0.4436]
t
m/s。探测器状态转移矩阵为
[0126][0127]
常值向量为
[0128][0129]
则所需的速度脉冲为
[0130]
δv=v
‑
v
‑ (49)
[0131]
即通过式(46)(47)(48)(49)建立的制动时间与制动速度的关系。
[0132]
步骤3:建立关于探测器相对于碰撞点位置的引力势函数;同时用具有高势场值的斥力势函数表示在探测器标称轨迹范围内的球形障碍物。通过对所述斥力势函数修正,使其满足李雅普诺夫稳定性条件,进而使斥力势函数在碰撞点处收敛。将引力势函数和修正后的斥力势函数叠加获得修正势函数。
[0133]
选取引力势函数为
[0134][0135]
其中,
[0136]
[0137]
r
l
为探测器在小行星表面坐标系下相对碰撞点的位置,用探测器在小行星表面坐标系内位置r表示为
[0138]
r
l
=r
‑
r
t
(52)
[0139]
其中r
t
为小天体表面坐标系内碰撞点的位置。定义的引力势函数为探测器位置的函数,且该势函数是正定的,当且仅当在r=r
t
即探测器到达碰撞点时,引力势函数为零。
[0140]
矩阵m决定了探测器跳向着陆点的方向,为了保证在与碰撞点等距离的点中,距探测器制动点与目标点连线越近的点,势场值越低,选取参数为
[0141]
k
x
=k
y
=k>1,k=2(53)
[0142]
引入一个具有较高势函数的区域表示运动路径的限制条件,探测器弹跳路径上存在球形障碍物,高值势函数区域的梯度值表示施加在探测器上规避障碍物的斥力大小,选取高斯函数形式的斥力势函数为
[0143][0144]
其中r
o
为小天体表面坐标系内障碍物球心的位置矢量,λ1=1000,λ2=900为斥力势的高和宽。考虑到当r=r
t
时,式(54)不为零,不满足李雅普诺夫稳定性条件。为了使加入斥力势能后的势函数在碰撞点处收敛,将式(54)修正为
[0145][0146]
其中
[0147][0148][0149]
则修正后的势函数为
[0150][0151]
步骤4:通过给出探测器机动位置判断条件和制动后的期望速度,代入步骤3中的修正势函数求得制动后脉冲机动速度的大小。
[0152]
当探测器的实际轨迹与参考轨迹误差值大于允许最大误差时,即δr=||r
‑
r
e
||≥r
max
时,发动机点火对探测器进行制动控制,选取制动后的期望速度为
[0153][0154]
式(58)对时间的一阶导数为
[0155][0156]
将式(59)带入式(60),得
[0157][0158]
k为制动后探测器脉冲机动速度的大小,选取k>0,则可以保证在本次制动后势函数对时间的导数是负定的。已知势函数为正定的,依据李亚普诺夫稳定定理,式(59)中确定的速度方向能够保证探测器位置最终收敛到期望的末端状态,即预定的目标碰撞点。
[0159]
步骤5:以探测器制动后经过剩余时间t
go
最终到达的目标点处势场值φ
f
最小为性能指标,通过步骤3中建立的修正势函数,确定本次制动后探测器脉冲机动速度的大小k,进而获得探测器进行轨迹修正所需的制动速度脉冲,探测器通过所述制动速度脉冲进行弱引力小天体表面弹跳轨迹修正控制,从而提高探测器移动的位置精度。
[0160]
以探测器通过本次制动后,在不受控制力的作用下,经过剩余时间t
go
最终到达的目标点处势场值φ
f
最小为性能指标,即
[0161][0162]
确定本次制动后探测器期望速度的大小k,其中剩余时间t
go
是探测器由当前状态到完成整个弹跳过程所花费的时间。
[0163]
制动后探测器的状态为
[0164][0165]
则由φ
f
最小的必要条件
[0166][0167]
结合线性化模型(39),可求得k的唯一解
[0168][0169]
式中a
i
为制动时间t
s
的函数,其表达式如下:
[0170]
若i=1,2,3
[0171][0172]
若i=4,5,6
[0173]
[0174]
由于
[0175][0176]
因此式(65)给出的k值是在给定条件下,使碰撞点处势场值φ
f
最小的制动后探测器脉冲机动速度大小。则通过式(59)可以确定需要的制动速度脉冲为
[0177][0178]
代入数据求得δv=[1.8725,3.4351,
‑
1.0348]
t
m/s,制动时刻为t=13.6441s,剩余时间为t
go
=22.5154s,制动位置为r=[29.5231,40.2517,15.3601]
t
m,修正轨迹最终碰撞点为r
s
=[80.3195,120.6092,0]
t
m。如图2所示,使用本发明公开的弱引力小天体表面弹跳轨迹修正控制方法,探测器在弹跳过程中出现较大轨迹偏差时,能够快速的完成速度脉冲机动,进而提高了探测器弹跳移动的位置精度。
[0179]
如图3所示,通过300次蒙特卡罗仿真发现本发明所述方法较好地将探测器在起跳过程中的误差干扰轨迹进行修正,使得探测器在原本误差较大的碰撞位置优化在目标位置附近。
[0180]
以上所述的具体描述,对发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施例而已,并不用于限定本发明的保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。