技术特征:
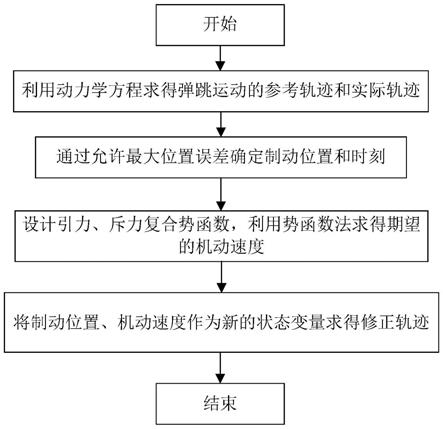
1.弱引力小天体表面弹跳轨迹修正控制方法,其特征在于:包括如下步骤,步骤1:分别建立在小天体固连坐标系和表面坐标系下的动力学方程,考虑探测器在起跳过程中受到的外界干扰因素,得到包含未知干扰的探测器实际弹跳轨迹动力学方程;步骤2:对小天体表面坐标系下的动力学方程进行线性化求解,得到制动时间与制动速度的关系;步骤3:建立关于探测器相对于碰撞点位置的引力势函数;同时用具有高势场值的斥力势函数表示在探测器标称轨迹范围内的球形障碍物;通过对所述斥力势函数修正,使其满足李雅普诺夫稳定性条件,进而使斥力势函数在碰撞点处收敛;将引力势函数和修正后的斥力势函数叠加获得修正势函数;步骤4:通过给出探测器机动位置判断条件和制动后的期望速度,代入步骤3中的修正势函数求得制动后脉冲机动速度的大小;步骤5:以探测器制动后经过剩余时间t
go
最终到达的目标点处势场值φ
f
最小为性能指标,通过步骤3中建立的修正势函数,确定本次制动后探测器脉冲机动速度的大小k,进而获得探测器进行轨迹修正所需的制动速度脉冲,探测器通过所述制动速度脉冲进行弱引力小天体表面弹跳轨迹修正控制,从而提高探测器移动的位置精度。2.如权利要求1所述的弱引力小天体表面弹跳轨迹修正控制方法,其特征在于:步骤1实现方法为,针对探测器的单次弹跳移动问题,在小天体固连坐标系下,探测器在起跳后的动力学方程表示为其中,r
b
、v
b
分别为探测器的位置和速度矢量,ω为小天体的自旋角速度,a
b
为其他未考虑摄动力的加速度,v为引力势函数;在表面坐标系下,探测器的动力学方程为其中,r、v分别为探测器的位置和速度矢量,ρ为表面坐标系原点相对小天体中心的位置矢量,u
b
为探测器本体坐标系的推力矢量,为从本体坐标系转换到表面坐标系的矩阵,a为其他未考虑摄动力的加速度;考虑到探测器的动力学模型存在各种不确定性,所述不确定性形成因素包括模型参数误差、未知的高阶引力场模型、未建模摄动力,所述不确定性形成因素导致的动力学变化归结为无模型加速度;令对动力学方程积分得
其中,n
i
(i=r,v)为未知干扰量。3.如权利要求2所述的弱引力小天体表面弹跳轨迹修正控制方法,其特征在于:步骤2实现方法为,选取探测器在小天体表面坐标系下的位置、速度为状态变量,即在初始状态x0处对动力学方程(1)进行线性化,得到探测器弹跳运动的线性化方程得到探测器弹跳运动的线性化方程其中其中其中其中与分别为引力位函数在初始状态x0处对位置r的一阶导数与二阶导数;探测器弹跳运动的线性化系统(5)为线性定常系统,该系统的解为由于u为常值矩阵,且矩阵是可逆的,因此系统的解表示为
x(t)=e
(a δ)t
x0 (a δ)
‑1[e
(a δ)t
‑
i6×6]u(12)推力器制动时间为t
s
,制动前的探测器速度为v
‑
,制动后探测器速度为v
,探测器状态转移矩阵为常值向量为则所需的速度脉冲为δv=v
‑
v
‑
(15)即通过式(12)(13)(14)(15)建立的制动时间与制动速度的关系。4.如权利要求3所述的弱引力小天体表面弹跳轨迹修正控制方法,其特征在于:步骤3实现方法为,选取引力势函数为其中,r
l
为探测器在小天体表面坐标系下相对碰撞点的位置,用探测器在小天体表面坐标系内的位置r表示为r
l
=r
‑
r
t
(18)其中r
t
为小天体表面坐标系内碰撞点的位置;定义的引力势函数为探测器位置的函数,且该势函数是正定的,当且仅当在r=r
t
即探测器到达碰撞点时,引力势函数为零;矩阵m决定了探测器跳向着陆点的方向,为了保证在与碰撞点等距离的点中,距探测器制动点与目标点连线越近的点,势场值越低,选取参数为k
x
=k
y
=k>1(19)引入具有高势函数的区域表示运动路径的限制条件,探测器弹跳路径上存在球形障碍物,高值势函数区域的梯度值表示施加在探测器上规避障碍物的斥力大小,选取高斯函数形式的斥力势函数为其中r
o
为小天体表面坐标系内障碍物球心的位置矢量,λ1、λ2为斥力势的高和宽;考虑到当r=r
t
时,式(20)不为零,不满足李雅普诺夫稳定性条件;为了使加入斥力势能后的势函数在碰撞点处收敛,将式(20)修正为
其中p
x
>1,p
y
>1,p
z
>1(23)则修正后的势函数为5.如权利要求4所述的弱引力小天体表面弹跳轨迹修正控制方法,其特征在于:步骤4实现方法为,当探测器的实际轨迹与参考轨迹误差值大于允许最大误差时,即δr=||r
‑
r
e
||≥r
max
时,发动机点火对探测器进行制动控制,选取制动后的期望速度为式(24)对时间的一阶导数为将式(25)带入式(26),得k为制动后探测器脉冲机动速度的大小,选取k>0,则可以保证在本次制动后势函数对时间的导数是负定的;已知势函数为正定的,依据李亚普诺夫稳定定理,式(25)中确定的速度方向保证探测器位置最终收敛到期望的末端状态,即预定的目标碰撞点。6.如权利要求5所述的弱引力小天体表面弹跳轨迹修正控制方法,其特征在于:步骤5实现方法为,以探测器通过本次制动后,在不受控制力的作用下,经过剩余时间t
go
最终到达的目标点处势场值φ
f
最小为性能指标,即确定本次制动后探测器脉冲机动速度的大小k,其中剩余时间t
go
是探测器由当前状态到完成整个弹跳过程所花费的时间;制动后探测器的状态为
则由φ
f
最小的必要条件结合线性化模型(5),求得k的唯一解式中a
i
为制动时间t
s
的函数,其表达式如下:若i=1,2,3若i=4,5,6由于因此式(31)给出的k值是在给定条件下,使碰撞点处势场值φ
f
最小的制动后探测器脉冲机动速度大小;则通过式(25)确定需要的制动速度脉冲为探测器通过所述制动速度脉冲δv进行弱引力小天体表面弹跳轨迹修正控制,从而提高探测器移动的位置精度。
技术总结
本发明公开的弱引力小天体表面弹跳轨迹修正控制方法,涉及一种在弱引力小天体表面弹跳移动过程中通过势函数制导,从而实现对探测器轨迹进行修正的控制方法,属于深空探测领域。针对现有的小天体表面弹跳移动轨迹修正方法,没有考虑在弹跳过程中位置误差较大时进行脉冲速度机动以及对障碍物的处理,只能进行微小位置偏差的修正。本发明实现方法为:探测器在起跳后因速度误差导致轨迹偏差较大时,将采取脉冲机动的方式对轨迹进行修正,通过引入表示障碍物的修正斥力势函数与引力势函数叠加获得修正势函数,通过所述修正势函数获取脉冲机动速度,探测器通过所述制动速度脉冲进行弱引力小天体表面弹跳轨迹修正控制,从而提高探测器移动的位置精度。测器移动的位置精度。测器移动的位置精度。
技术研发人员:朱圣英 杨哲 崔平远 徐瑞 梁子璇 葛丹桐
受保护的技术使用者:北京理工大学
技术研发日:2021.09.06
技术公布日:2021/12/3
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。