1.本发明涉及一种在拓扑结构可变以及存在约束条件的情况下,具有执行器故障的基于可切换拓扑的时滞多智能体系统的容错控制方法,属于容错控制领域。
背景技术:
2.由多个智能体组成相互协调的系统能够更加轻松完成复杂且难度系数高的任务,这类系统我们统称为多智能体系统。系统中的各个智能体之间通过拓扑结构和邻域的指定规则来通信以实现相互协作,实际生活中所碰到的大型复杂问题也可以通过多智能体系统理论来解决,这使得多智能体系统得到了广泛的应用,也吸引越来越多的人对多智能体系统展开了研究。例如,无人飞行器(uav)的协同控制,智能体编队控制、智能交通控制等,一致性问题是多智能体系统中基本却至关重要的问题之一,为了实现一致性,需要设计一个合适的分布式控制律,控制各个智能体,使其最终状态趋近相同。
3.多智能体系统在实际的应用中需要各个智能体之间相互协作完成任务,系统中任何智能体发生故障都有可能影响到最终需要的结果。如果出现故障的智能体没有得到很好的处理那么将会牵连到更多的智能体,那么整个系统很难保证稳定,如果智能体系统出现故障,那么系统的性能可能达不到预期的要求,智能体发生故障的数量比较多的情况下系统可能会直接崩溃,那么将会遭受到十分严重并且不可挽回的损失。容错控制的引入可以有效防止小故障对系统的影响。对多智能体系统的研究具有深刻的现实意义。
4.近年来,网络的飞速发展使得控制领域与网络的联系更加紧密,由于网络的引入,控制系统许多方面的效率都有所提高,例如,控制系统的处理速度变得更快。然而,它也带来了巨大的挑战,网络传输必然存在通讯时延,会对系统的控制造成影响,时延过大甚至会使控制器不起作用。除此之外,在实际的应用中,由于某些特殊需要,多智能体需要添加某些约束条件。例如,无人机搜寻和救援必须位于指定目标区域。并且在系统运行的过程中,其拓扑结构随时会发生改变。再加上系统不可避免的会受到干扰影响,在对多智能体系统进行控制时,需要将上述因素综合考虑。
技术实现要素:
5.针对现有技术不足,本发明公开了一种基于拓扑结构可改变以及存在约束条件的时滞多智能体系统的自适应约束容错控制器的设计方法,即基于可切换拓扑的时滞多智能体系统的容错控制方法。在考虑存在约束条件的情况下,为了提高时滞控制系统的稳定性,使系统发生执行器失效故障时具有h
∞
性能,本发明设计了一个多智能体系统的容错控制器,使得系统在发生执行器失效故障、存在干扰影响、存在通讯时延以及拓扑结构发生改变时仍能够保持系统的稳定性能。
6.步骤1,给出带有执行器部分失效故障和外部干扰的多智能体系统的模型,动力学方程建立如下:
7.8.其中,x
i
(t)∈r
m
代表系统状态变量,d
i
(t)代表的是系统中存在的外部干扰,为系统的控制输入;
9.步骤2,给出多智能执行器的故障模型以及干扰模型;
10.执行器故障模型如下:
[0011][0012]
其中,表示系统中第i个智能体的第s个执行器发生了部分失效故障情况下的输出信号,u
is
(t)表示系统中第i个智能体的第s个执行器的输入信号;ρ(t)代表系统中的部分失效率,ρ
is
(t)表示来自第i个智能体的第s个执行器发生部分失效故障的部分失效率;m代表执行器通道的总个数;代表ρ
is
(t)的上界,ρ
is
代表ρ
is
(t)的下界;我们进一步定义
[0013][0014]
由于系统中的部分失效率ρ
i
是未知的,所以我们定义ρ
i
=ρ
0i
(i g
i
)去降低控制器设计中的保守性,其中
[0015][0016]
我们定义ρ(t)=diag{ρ1(t),ρ2(t),...,ρ
m
(t)},根据公式(2)(3)我们可以得到:
[0017]
ρ
i
=ρ
0i
(i g)
ꢀꢀ
(4)
[0018]
其中,
[0019]
g=diag{g1,g2,...,g
m
},h=diag{h1,h2,...,h
m
},|g|=diag{|g1|,|g2|,...,|g
m
|},
[0020][0021]
进一步来说第i个智能体的扰动d
i
(t)∈r
m
,给出系统外部干扰的动态方程可以描述如下:
[0022][0023]
其中,s
i
∈r
m
×
m
是已知的常数矩阵;
[0024]
步骤3,给出多智能体系统干扰观测器的模型
[0025]
干扰观测器模型如下:
[0026][0027]
其中z
i
(t)是干扰观测器的辅助函数,q
i
是干扰观测器的反馈增益,代表外部干扰d
i
(t)的估计值;是对多智能体系统的部分失效率ρ
i
(t)的在线实时估计,为了更好地的实现多智能体系统的一致性,我们采用自适应的方法对智能体的执行器的部分失效率进行在线实时估计;为了方便书写,将写成
[0028]
为了更好地实现多智能体系统的一致性,我们采用自适应的方法估计执行器的部
分失效率,并且将自适应律设计如下:
[0029][0030]
其中μ
s
是正常数;
[0031]
步骤4,建立时滞多智能体系统容错约束一致性控制律
[0032]
给出整个时滞多智能体系统的容错约束一致性控制律
[0033][0034]
其中,a
ij
代表的是智能体之间的信息连通强度,δa
ij
(t)表示智能体i和智能体j之间的通讯不确定性;τ代表的是系统中的常时滞,k代表的是控制器增益,p
x
(x
i
(t))代表的是智能体在规定区域的投影,代表外部干扰d
i
(t)的估计值,其中,将d
i
(t)和写成
[0035]
步骤5、针对步骤1、2、3、4所描述的系统的状态方程以及系统一致性条件和约束条件选择如下合适的lyapunov
‑
krasovskii泛函,将一致性问题和约束条件,转化为系统的稳定性问题,并得到使系统不仅实现约束一致性而且带有h∞性能的充分条件;
[0036]
本发明的设计的李雅普诺夫函数:
[0037][0038]
并采用以下基于初始条件构造的h
∞
性能要求;
[0039][0040]
其中:
[0041]
z(t)=[z1(t),z2(t),z3(t)]
t
,z1(t)=c1||x(t)
‑
(11
t
/n)x(t),z2(t)=c2η(t)
t
,
[0042]
c
j
为实数,j=1,2,3,
[0043]1n
代表
[0044]
步骤6是针对步骤5做了进一步的优化。由于部分失效率是未知的,基于此设计了如下定理:
[0045]
我们先不考虑不确定拓扑的情况,即δa
ij
=0。给定适当的参数c
m
,m=1,2,3,若存在合适的矩阵k>0,q
i
,i=1,2,3,...,n,n
j
,j=1,2,3,4和具有恰当维数且正标量ε>0,结合公式(3)(4)使得下面由系统稳定条件以及性能指标得到的线性矩阵不等式成立,则步骤5的时滞多智能体系统可以实现在具有约束条件下以h
∞
干扰水平γ达到容错一致性;
[0046][0047][0048][0049]
其中:
[0050][0051][0052]
γ=diag{ρ0h,ρ0h,ρ0h,ρ0h,ρ0h,ρ0h},q=diag{q1,q2,...,q
n
},
[0053][0054]
l为多智能体系统的拉普拉斯矩阵;
[0055]
其中,z=diag{z1,z2,...,z
n
},d=diag{d1,d2,...,d
n
},并且d和z都大于0。
[0056]
步骤7是针对步骤6做的进一步的优化,即在原有的基础上,考虑多智能体系统不确定拓扑的情况(δa
ij
≠0),转换成拉普拉斯矩阵的形式我们用δl表示,而δl可以表示为δl=e1σ(t)e2,其中是代表常数矩阵,为具有由拓扑结构对应的图的边和节点索引的行和列的0和1矩阵,|ε|代表图中边的条数,代表的是对角矩阵,其中的对角元素代表边缘的不确定性,即非零矩阵δa
ij
;考虑具有外部干扰以及具有时滞和不确定拓扑的多智能体系统,设计了如下定理,给定适当的参数c
m
,m=1,2,3,若存在合适的矩阵k>0,q
i
,i=1,2,3,...,n,n
j
,j=1,2,3,4和具有恰当维数且正标量ε>0,使得
下面的线性矩阵不等式成立,则整个系统在存在通讯时延以及切换拓扑的情况下可以达到具有h
∞
性能指标γ的抗干扰自适应容错约束一致性。
[0057][0058][0059]
其中:
[0060][0061]
γ1=diag{ρ0h,ρ0h,ρ0h,ρ0h,ρ0h,ρ0h},
[0062]
γ2=ρ0(i h)diag{e1,e1,e1,e1,e1,e1},
[0063][0064]
上式中中包含的各个元素如下:
[0065][0066]
其中
[0067][0068]
本发明的有益效果:由于时滞多智能体系统中增设了一个容错控制器,使得系统在存在执行器失效故障、网络延迟、拓扑结构改变以及干扰影响的时候,仍然能保持系统稳定运行,从而提高了时滞多智能体系统的安全性和可靠性;另外,在稳定性以及动态性能指标方面,本系统在兼顾系统稳定性的同时又具有h
∞
性能。
附图说明:
[0069]
图1:多智能体的拓扑结构示意图。
[0070]
图2:多智能体的拓扑结构发生改变后的拓扑结构示意图。
[0071]
图3:对智能体1失效率的估计图。
[0072]
图4:对智能体1干扰的估计图。
[0073]
图5:对智能体2失效率的估计图。
[0074]
图6:对智能体2干扰的估计图。
[0075]
图7:对智能体3失效率的估计图。
[0076]
图8:对智能体3干扰的估计图。
[0077]
图9:对智能体4失效率的估计图。
[0078]
图10:对智能体4干扰的估计图。
[0079]
图11:4个智能体在通讯时延为0.1s并在中途进行一次拓扑结构切换下的状态轨迹图。
[0080]
图12:4个智能体在通讯时延为0.2s并在中途进行一次拓扑结构切换下的状态轨迹图。
[0081]
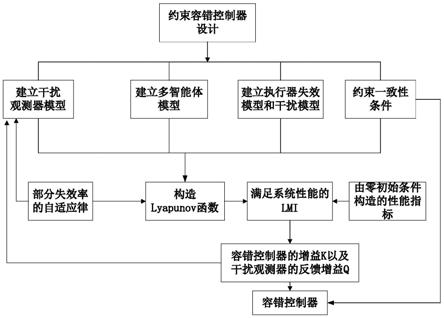
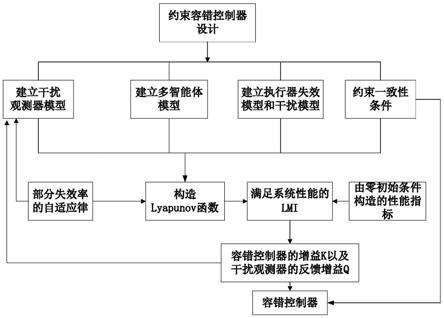
图13:基于可切换拓扑的时滞多智能体系统约束容错控制方法的流程图。
[0082]
具体的实施方式:
[0083]
下面结合附图1
‑
附图13,对本发明作进一步详细描述。
[0084]
步骤1,给出带有执行器部分失效故障和外部干扰的多智能体系统的模型,动力学方程建立如下:
[0085][0086]
其中,x
i
(t)∈r
m
代表系统状态变量,d
i
(t)代表的是系统中存在的外部干扰,为系统的控制输入。表示系统中第i个智能体的第s个执行器发生了部分失效故障情况下的输出信号,u
is
(t)表示系统中第i个智能体的第s个执行器的输入信号。
[0087]
步骤2,构造多智能体的执行器的失效模型。现给出执行器的一般故障模型描述如下:
[0088]
定义一个故障模型:
[0089][0090]
其中,表示系统中第i个智能体的第s个执行器发生了部分失效故障情况下的输出信号,u
is
(t)表示系统中第i个智能体的第s个执行器的输入信号。ρ(t)代表系统中的部分失效率,ρ
is
(t)表示来自第i个智能体的第s个执行器发生部分失效故障的部分失效率。m代表执行器通道的总个数。代表ρ
is
(t)的上界,ρ
is
代表ρ
is
(t)的下界。当系统部分失效率的下界和上界都是1,即时,说明系统中的执行器无故障正常运行。如果部分失效率的上界和下界介于0和1之间,即说明执行器发生了部分失效故障,ρ
is
和都可以代表执行器发生部分失效故障的程度,我们进一步可以定义
[0091][0092]
由于系统中的部分失效率ρ
i
是未知的,所以我们定义ρ
i
=ρ
0i
(i g
i
)去降低控制器设计中的保守性,其中
[0093][0094]
我们定义ρ(t)=diag{ρ1(t),ρ2(t),...,ρ
m
(t)},根据公式(2)(3)我们可以得到:
[0095]
ρ
i
=ρ
0i
(i g)
ꢀꢀ
(4)
[0096]
其中,
[0097]
g=diag{g1,g2,...,g
m
},h=diag{h1,h2,...,h
m
},|g|=diag{|g1|,|g2|,...,|g
m
|},|g|≤h≤i。
[0098]
进一步来说第i个智能体的扰动d
i
(t)∈r
m
,系统外部干扰的动态方程可以描述如下:
[0099][0100]
其中,s
i
∈r
m
×
m
是已知的常数矩阵。
[0101]
步骤3,构建多智能体系统的干扰观测器,其模型描述如下:
[0102][0103]
其中z
i
(t)是干扰观测器的辅助函数,q
i
是干扰观测器的反馈增益,代表外部干扰d
i
(t)的估计值。是对多智能体系统的部分失效率ρ
i
(t)的在线实时估计,为了更好地的实现多智能体系统的一致性,我们采用自适应的方法对智能体的执行器的部分失效率进行在线实时估计。为了方便书写,将写成
[0104]
我们的自适应律设计如下:
[0105][0106]
其中μ
s
是正常数。
[0107]
步骤4,建立时滞多智能体系统容错约束一致性控制律,
[0108]
给出整个时滞多智能体系统的容错约束一致性控制律;
[0109]
即针对步骤1、2、3建立整个系统的约束一致性控制律方程:
[0110]
首先给出整个时滞多智能体系统的一致性控制律,即对于任意的初始条件,如果满足,可实现一致性;如果满足则说明智能体收敛到约束区域了。
[0111]
接着设计容错控制器:
[0112]
[0113]
其中,a
ij
代表的是智能体之间的信息连通强度,δa
ij
(t)表示智能体i和智能体j之间的通讯不确定性。τ代表的是系统中的常时滞,k代表的是控制器增益,p
x
(x
i
(t))代表的是智能体在规定区域的投影,代表外部干扰d
i
(t)的估计值,其中,将d
i
(t)和写成
[0114]
步骤5,针对步骤,1、2、3、4所描述的系统的状态方程以及系统一致性条件和约束条件选择如下合适的lyapunov
‑
krasovskii泛函,将一致性问题和约束条件,转化为系统的稳定性问题,并得到使系统不仅实现约束一致性而且带有h∞性能的充分条件。
[0115]
该发明的设计的李雅普诺夫函数:
[0116][0117]
在传统的h
∞
理论中,应预先满足零初始条件。这种情况在实践中相当的保守,故采用以下基于初始条件构造的性能要求。
[0118][0119][0120]
其中:
[0121]
z(t)=[z1(t),z2(t),z3(t)]
t
,z1(t)=c1||x(t)
‑
(11
t
/n)x(t)||,z2(t)=c2η(t)
t
,c
j
为实数,j=1,2,3,为实数,j=1,2,3,1
n
代表
[0122]
给定适当的参数c
m
,m=1,2,3,若存在合适的矩阵k>0,q
i
,i=1,2,3,...,n,n
j
,j=1,2,3,4和具有恰当维数且正标量ε>0,使得下面的线性矩阵不等式成立,则时滞多智能体系统可以实现在具有约束条件下的一致性。
[0123]
[0124][0125]
γ2n4‑
i>0,γ2n5‑
i>0,γ2n6‑
i>0,
[0126]
其中
[0127][0128][0129]
步骤6,结合步骤5,我们先不考虑不确定拓扑的情况,即δa
ij
=0。给定适当的参数c
m
,m=1,2,3,若存在合适的矩阵k>0,q
i
,i=1,2,3,...,n,n
j
,j=1,2,3,4和具有恰当维数且正标量ε>0,结合公式(3)(4)使得下面由系统稳定条件以及性能指标得到的线性矩阵不等式成立,则步骤5的时滞多智能体系统可以实现在具有约束条件下以h
∞
干扰水平γ达到容错一致性。
[0130][0131][0132]
其中:
[0133][0134][0135]
γ=diag{ρ0h,ρ0h,ρ0h,ρ0h,ρ0h,ρ0h},q=diag{q1,q2,...,q
n
},
[0136][0137]
l为多智能体系统的拉普拉斯矩阵;
[0138]
其中,z=diag{z1,z2,...,z
n
},d=diag{d1,d2,...,d
n
},并且d和z都大于0。
[0139]
步骤7是针对步骤6做的进一步的优化,即在原有的基础上,考虑多智能体系统不确定拓扑的情况(δa
ij
≠0),转换成拉普拉斯矩阵的形式我们用δl表示,而δl可以表示为δl=e1σ(t)e2,其中是代表常数矩阵,为具有由拓扑结构对应的图的边和节点索引的行和列的0和1矩阵,|ε|代表图中边的条数,代表的是对角矩阵,其中的对角元素代表边缘的不确定性,即非零矩阵δa
ij
。考虑具有外部干扰以及具有时滞和不确定拓扑的多智能体系统。给定适当的参数c
m
,m=1,2,3,若存在合适的矩阵k>0,q
i
,i=1,2,3,...,n,n
j
,j=1,2,3,4和具有恰当维数且正标量ε>0,使得下面的线性矩阵不等式成立,则整个系统在存在时滞以及切换拓扑的情况下可以达到具有h
∞
性能指标γ的抗干扰自适应容错约束一致性。
[0140][0141][0142]
其中:
[0143][0144]
γ1=diag{ρ
0 h,ρ
0 h,ρ
0 h,ρ
0 h,ρ
0 h,ρ
0 h},
[0145]
γ2=ρ0(i h)diag{e1,e1,e1,e1,e1,e1},
[0146][0147]
上式中中包含的各个元素如下:
[0148][0149]
其中
[0150][0151][0152][0153]
以下用一个数字仿真实例来进行验证容错控制设计方法的有效性:
[0154]
多智能体系统的laplace阵l满足:
[0155][0156]
多智能体系统拓扑结构发生改变后的laplace阵l1满足:
[0157][0158]
执行器的部分失效故障的范围为:
[0159]
0.6≤ρ
1m
≤1,0.6≤ρ
2m
≤1,0.65≤ρ
3m
≤1,0.6≤ρ
4m
≤1,m=1,2.
[0160]
我们设定:
[0161][0162]
c1=0.7167,c2=
‑
11.6350,c3=1.0873
[0163]
通过步骤7,我们可以分别得到以下容错控制器增益以及干扰观测器的反馈增益:
[0164][0165]
图一表示多智能体系统的拓扑结构,本发明研究的是无向拓扑结构下的四个智能体的系统。
[0166]
图二表示发生拓扑结构切换后多智能体系统的拓扑结构。
[0167]
图三是表示的是第一个智能体的执行器的部分失效率及对其自适应实时估计;在a1
‑
a2段ρ
11
、ρ
12
和重合,在a3
‑
a4段ρ
12
和重合,在a5
‑
a6段ρ
11
和重合;点a1和点a2位于顶部刻度线上,且点a1为顶部刻度线和左侧刻度线的交点;点a4位于右侧刻度线上;点a5和点a6位于底部刻度线上,且点a6为底部刻度线和右侧刻度线的交点。
[0168]
图四是表示的是第一个智能体系统存在的干扰及对干扰的观测。
[0169]
图五是表示的是第二个智能体的执行器的部分失效率及对其自适应实时估计;在b1
‑
b2段ρ
21
、ρ
22
和重合,在b3
‑
b4段ρ
22
和重合,在b5
‑
b6段ρ
21
和重合;点b1和点b2位于顶部刻度线上,且点b1为顶部刻度线和左侧刻度线的交点;点b4位于右侧刻度线上;点b5和点b6位于底部刻度线上,且点b6为底部刻度线和右侧刻度线的交点。
[0170]
图六是表示的是第二个智能体系统存在的干扰及对干扰的观测。
[0171]
图七是表示的是第三个智能体的执行器的部分失效率及对其自适应实时估计;在c1
‑
c2段ρ
31
、ρ
32
和重合,在c3
‑
c4段ρ
32
和重合,在c5
‑
c6段ρ
31
和重合;点c1和点c2位于顶部刻度线上,且点c1为顶部刻度线和左侧刻度线的交点;点c4和点c6位于右侧刻度线上。
[0172]
图八是表示的是第三个智能体系统存在的干扰及对干扰的观测。
[0173]
图九是表示的是第四个智能体的执行器的部分失效率及对其自适应实时估计;在d1
‑
d2段ρ
41
、ρ
42
和重合,在d2
‑
d3段ρ
41
、重合,在d4
‑
d5段ρ
42
和重合;点d1、点d2和点d3位于顶部刻度线上,且点d1为顶部刻度线和左侧刻度线的交点,点d3为顶部刻度线和右侧刻度线的交点;点d4和点d5位于底部刻度线上,且点d5为底部刻度线和右侧刻度线的交点。
[0174]
图十是表示的是第四个智能体系统存在的干扰及对干扰的观测。
[0175]
图十一表示的是在通讯时延τ=0.1s,中途存在拓扑结构的切换的情况下,对多智能体状态的跟踪轨迹,四个智能体同一状态运行的轨迹最终趋于一点,并且汇集在约束区域圆之内,从而实现了四个智能体的约束容错一致性。
[0176]
图十二表示的是在通讯时延τ=0.2s,中途存在拓扑结构的切换的情况下,对多智能体状态的跟踪轨迹,四个智能体同一状态运行的轨迹最终趋于一点,并且汇集在约束区域圆之内,从而实现了四个智能体的约束容错一致性。
[0177]
本发明研究了时滞多智能体系统在发生执行器故障、存在约束条件和拓扑结构改变的情况下的容错控制器的设计。首先,根据故障特征,建立了适用于多智能体的故障模型。其次,对多智能体系统进行扩维,并采用自适应的方法在线实时估计执行器的部分失效率,其中,结合干扰的模型,设计干扰观测器以降低干扰对系统性能的影响。基于多智能体系统的容错约束一致性的要求、干扰以及自适应律,建立lyapunov函数,利用新的性能指标代替零初始条件以实现h
∞
性能指标,然后,给出了一个充分的条件(lmi)以确保系统实现容错约束一致性。最后利用matlab,结合lmi方法,求出符合条件的控制器增益和干扰观测器增益,通过仿真实例验证了该算法的有效性。本发明使得时滞多智能体系统在存在约束条件、干扰影响以及拓扑结构发生改变的情况下兼顾稳定性的同时又具有h
∞
性能,并且可以实现该系统的一致性,提高了多智能体系统的安全性和实用性。
[0178]
需要理解到的是:上述实施例虽然对本发明的设计思路作了比较详细的文字描述,但是这些文字描述,只是对本发明设计思路的简单文字描述,而不是对本发明设计思路的限制,任何不超出本发明设计思路的组合、增加或修改,均落入本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。