1.本实用新型涉及环保技术领域,具体涉及一种自动驾驶清扫车系统。
背景技术:
2.人类智慧推动社会进步,科学技术如今已经悄无声息地渗透进日常生活,智能时代已然来临。垃圾清扫作为一项劳累繁重的工作,花费了劳动者大量的时间和精力。为了使垃圾清扫这一过程更加简单方便,出现了垃圾清扫车这一机械化工具,而垃圾清扫车只能解决一定时间内的清扫效率问题,仍需人工成本、工作时间有限、清扫过程安全隐患高、清扫方式单一等问题依然存在。自动驾驶垃圾清扫车的出现,从一定程度上改变了垃圾清扫市场的现状。而目前的自动清扫车仍处于萌芽阶段,很多问题有待解决。现有的自动驾驶清扫车无法实现垃圾和尘土的分离,从而不利于垃圾的后续处理。
技术实现要素:
3.本实用新型所要解决的技术问题是提供一种自动驾驶清扫车系统,便于将垃圾和尘土分离,以解决现有技术中的问题。
4.为解决上述技术问题,本实用新型的技术方案是:一种自动驾驶清扫车系统,包括无人驾驶车本体,所述无人驾驶车本体的前端的底部设有开放槽,所述无人驾驶车本体的后端内设有分离室,所述无人驾驶车本体内设有位于所述开放槽的上方的垃圾收集室,所述分离室的前侧设有连通所述开放槽的进料口,所述开放槽内设有用于将垃圾向后扫向所述进料口的清扫系统,所述分离室内通过尘土分离系统与所述垃圾收集室相连通;所述尘土分离系统包括下端开口的分离管道,所述分离管道通过支撑板固定安装在所述分离室内,所述分离管道的下端的一侧设有进料通孔,所述进料口与所述进料通孔之间设有进料漏斗,所述进料漏斗的进料端与所述进料口相连,所述进料漏斗的出料端倾斜向下延伸与并所述进料通孔相连;所述分离管道的上端的一侧设有出料通孔,所述分离室的前侧还设有连通所述垃圾收集室的过孔,所述出料通孔与所述过孔之间设有出料管,所述出料管的一端与所述出料通孔相连,所述出料管的另一端倾斜向下延伸并与所述过孔相连;所述分离管道内固定安装有位于所述进料通孔的下方的网板,所述分离管道的顶壁与所述网板之间转动安装有与所述分离管道同轴设置的中心轴,所述中心轴上固定安装有螺旋状的输送叶片,所述分离管道上固定安装有用于带动所述中心轴转动的第一驱动电机。
5.作为进一步的改进,所述无人驾驶车本体的后端设有连通所述分离室的通槽,所述通槽内活动安装有盛接于所述分离管的下端的尘土收集盒。
6.作为优选的技术方案,所述清扫系统包括固定安装在所述开放槽内的导向板,所述导向板的后端与所述进料口的底部相连,所述导向板的前端倾斜向下延伸并与地面相接触,所述开放槽内转动安装有横向延伸的三个支撑轴,三个所述支撑轴的外侧连接有一清扫带,所述清扫带的外表面设有刷毛,所述清扫带底部的刷毛与地面相接触,所述清扫带后侧的刷毛与所述导向板的顶部相接触,所述开放槽的侧壁上设有固定安装有用于带动任一
所述支撑轴转动的第二驱动电机。
7.作为进一步的改进,所述导向板与地面相接触的一端设有耐磨橡胶层。
8.作为进一步的改进,所述无人驾驶车本体的顶部设有与所述垃圾收集室相连通的垃圾出口,所述无人驾驶车本体的顶部还铰接有用于将所述垃圾出口封闭的盖板。
9.由于采用了上述技术方案,一种自动驾驶清扫车系统,包括无人驾驶车本体,所述分离室内通过尘土分离系统与所述垃圾收集室相连通,所述进料漏斗的进料端与所述进料口相连,所述进料漏斗的出料端倾斜向下延伸与并所述进料通孔相连,所述出料管的一端与所述出料通孔相连,所述出料管的另一端倾斜向下延伸并与所述过孔相连,所述分离管道内固定安装有位于所述进料通孔的下方的网板,所述中心轴上固定安装有螺旋状的输送叶片;本实用新型当垃圾和尘土进入分离管道后,在重力的作用下掉落至网板上,尘土可通过网板上的网孔继续向下掉落至分离室的底部,较大的垃圾则停留在网板上方,随后通过第一驱动电机带动中心轴转动,中心轴转动时通过输送叶片将堆积在网板上的垃圾向上输送,使垃圾进入垃圾收集室内进行储存,从而实现垃圾和尘土的分离,以便于垃圾的后续处理。
附图说明
10.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
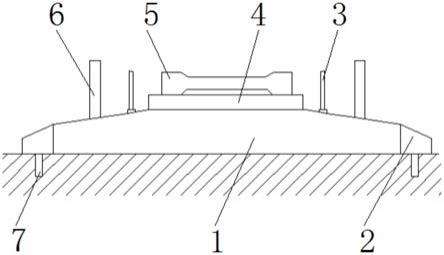
11.图1是本实用新型实施例的结构示意图;
12.图2是图1的剖视示意图。
13.图中:1
‑
无人驾驶车本体;2
‑
开放槽;3
‑
分离室;4
‑
垃圾收集室;5
‑
进料口;6
‑
分离管道;7
‑
支撑板;8
‑
进料通孔;9
‑
进料漏斗;10
‑
出料通孔;11
‑
过孔;12
‑
出料管;13
‑
网板;14
‑
中心轴;15
‑
输送叶片;16
‑
第一驱动电机;17
‑
通槽;18
‑
尘土收集盒;19
‑
导向板;20
‑
支撑轴;21
‑
清扫带;22
‑
第二驱动电机;23
‑
耐磨橡胶层;24
‑
垃圾出口;25
‑
盖板。
具体实施方式
14.如图1和图2所示,一种自动驾驶清扫车系统,包括无人驾驶车本体1,所述无人驾驶车本体1的前端的底部设有开放槽2,所述无人驾驶车本体1的后端内设有分离室3,所述无人驾驶车本体1内设有位于所述开放槽2的上方的垃圾收集室4,所述分离室3的前侧设有连通所述开放槽2的进料口5,所述开放槽2内设有用于将垃圾向后扫向所述进料口5的清扫系统,所述分离室3内通过尘土分离系统与所述垃圾收集室4相连通;所述尘土分离系统包括下端开口的分离管道6,所述分离管道6通过支撑板7固定安装在所述分离室3内,所述分离管道6的下端的一侧设有进料通孔8,所述进料口5与所述进料通孔8之间设有进料漏斗9,所述进料漏斗9的进料端与所述进料口5相连,所述进料漏斗9的出料端倾斜向下延伸与并所述进料通孔8相连;所述分离管道6的上端的一侧设有出料通孔10,所述分离室3的前侧还设有连通所述垃圾收集室4的过孔11,所述出料通孔10与所述过孔11之间设有出料管12,所述出料管12的一端与所述出料通孔10相连,所述出料管12的另一端倾斜向下延伸并与所述
过孔11相连;所述分离管道6内固定安装有位于所述进料通孔8的下方的网板13,所述分离管道6的顶壁与所述网板13之间转动安装有与所述分离管道6同轴设置的中心轴14,所述中心轴14上固定安装有螺旋状的输送叶片15,所述分离管道6上固定安装有用于带动所述中心轴14转动的第一驱动电机16。
15.本实施例的无人驾驶车本体1移动过程中通过清扫系统将进入开放槽2内的垃圾和尘土扫向进料口5,垃圾和尘土随后依次通过进料漏斗9和进料通孔8进入分离管道6内,并在重力的作用下掉落至网板13上,网板13上设有多个网孔,掉落至网板13上的尘土可通过网孔继续向下掉落至分离室3的底部,较大的垃圾则停留在网板13上方。
16.通过第一驱动电机16带动中心轴14转动,中心轴14转动时通过输送叶片15将堆积在网板13上的垃圾向上输送,当垃圾被输送至分离管道6的顶部后无法继续向上移动,则依次通过出料通孔10、出料管12和过孔11进入垃圾收集室4内进行储存,从而实现垃圾和尘土的分离。
17.所述无人驾驶车本体1的后端设有连通所述分离室3的通槽17,所述通槽17内活动安装有盛接于所述分离管道6的下端的尘土收集盒18。尘土收集盒18用于收集从网板13上分离出的尘土,当尘土收集盒18内集满尘土时,可将尘土收集盒18从通槽17抽出以进行清理。
18.所述清扫系统包括固定安装在所述开放槽2内的导向板19,所述导向板19的后端与所述进料口5的底部相连,所述导向板19的前端倾斜向下延伸并与地面相接触,所述开放槽2内转动安装有横向延伸的三个支撑轴20,三个所述支撑轴20的外侧连接有一清扫带21,所述清扫带21的外表面设有刷毛,所述清扫带21底部的刷毛与地面相接触,所述清扫带21后侧的刷毛与所述导向板19的顶部相接触,所述开放槽2的侧壁上设有固定安装有用于带动任一所述支撑轴20转动的第二驱动电机22。
19.通过第二驱动电机22带动其中一个支撑轴20转动,并通过此支撑轴20带动清扫带21转动,清扫带21转动时通过底部的刷毛带动位于地面上的垃圾和尘土向后移动至导向板19的前端,然后通过位于后侧的刷毛带动移动至导向板19上的垃圾和尘土沿导向板19向后向进料口5移动。
20.所述导向板19与地面相接触的一端设有耐磨橡胶层23,用于减小导向板19和地面摩擦发出的噪音。
21.所述无人驾驶车本体1的顶部设有与所述垃圾收集室4相连通的垃圾出口24,所述无人驾驶车本体1的顶部还铰接有用于将所述垃圾出口24封闭的盖板25。当垃圾收集室4内集满垃圾后,可通过掀起盖板25使垃圾出口24开启,以便对垃圾收集室4内的垃圾进行清理。
22.以上显示和描述了本实用新型的基本原理、主要特征及本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。