1.本实用新型涉及机器人领域,具体为一种能够爬楼梯的轮式机器人。
背景技术:
2.机器人是自动执行工作的机器装置。它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动。它的任务是协助或取代人类工作的工作,例如生产业、建筑业,或是危险的工作。它是高级整合控制论、机械电子、计算机、材料和仿生学的产物。在工业、医学、农业、建筑业甚至军事等领域中均有重要用途。国际上对机器人的概念已经逐渐趋近一致,机器人是靠自身动力和控制能力来实现各种功能的一种机器,它能为人类带来许多方便之处。在疫情期间很多人们都需要居家隔离,在拿取快递和购买食物这方面需要志愿者帮助,然而志愿者人数有限无法快速安排,这时可以通过操作机器人完成,然而现有的机器人却有以下问题:一、灵活性差,可以在平路上移动,却无法自动上楼梯;二、没有储物功能,无法进行运输;三、因体型问题,导致不易手提携带,为此提供了一种能够爬楼梯的轮式机器人。
技术实现要素:
3.本实用新型的目的是针对现有技术的缺陷,提供一种能够爬楼梯的轮式机器人,以解决上述背景技术提出的问题。
4.为实现上述目的,本实用新型提供如下技术方案:一种能够爬楼梯的轮式机器人,包括制动箱和物品存放箱,所述物品存放箱内部的四个拐角处均安装有第二电动伸缩杆,所述第二电动伸缩杆的顶部安装有箱盖,所述箱盖的顶部安装有把手,所述物品存放箱的两侧均安装有荧光板,所述物品存放箱的一端安装有电源开关,所述物品存放箱的底部安装有所述制动箱,所述制动箱的底部两端均安装有连接底架,所述连接底架的两端均安装有第一驱动电机,所述第一驱动电机的一端安装有爬梯轮,所述制动箱的两侧均安装有第一电动伸缩杆,所述第一电动伸缩杆的底部安装有连接板,所述连接板顶部的中部安装有第二驱动电动,所述连接板的底部安装有第一滚轮固定架,所述第一滚轮固定架的中部安装有第一滚轮,所述第一滚轮固定架的一侧安装有第三驱动电机,所述制动箱的一端安装有控制箱,所述控制箱的一侧安装有摄像头,所述摄像头的两侧均安装有照明灯板,所述制动箱的另一端安装有显示屏,所述显示屏的一侧设有充电口,所述制动箱的内部安装有蓄电池。
5.作为本实用新型的一种优选技术方案,所述连接底架通过螺栓安装在制动箱底部的两端上,所述第一驱动电机通过螺栓安装在连接底架的两端上,所述爬梯轮通过螺栓安装在第一驱动电机的一端上,所述爬梯轮由三脚架和第二滚轮组成。
6.作为本实用新型的一种优选技术方案,所述第一电动伸缩杆通过螺栓安装在制动箱的两侧上,所述连接板通过螺栓安装在第一电动伸缩杆的底部上,所述第二驱动电动通过螺栓安装在连接板顶部的中部上,所述第一滚轮固定架通过螺栓安装在连接板的底部
上,所述第一滚轮通过连接轴安装在第一滚轮固定架的中部上,所述第三驱动电机通过螺栓安装在第一滚轮固定架的一侧上。
7.作为本实用新型的一种优选技术方案,所述显示屏通过螺栓安装在制动箱的一端上,所述照明灯板和摄像头均通过螺栓安装在制动箱的另一端上,所述电源开关通过螺栓安装在物品存放箱的一端上,所述荧光板通过螺栓安装在物品存放箱的两侧上。
8.作为本实用新型的一种优选技术方案,所述第二电动伸缩杆通过螺栓安装在物品存放箱内部的四个拐角处,所述箱盖通过螺栓安装在第二电动伸缩杆的顶部上,所述把手通过螺栓安装在箱盖的顶部上。
9.作为本实用新型的一种优选技术方案,所述制动箱内的蓄电池分别与第一驱动电机、显示屏、第一电动伸缩杆、电源开关、第二驱动电动、第三驱动电机、照明灯板和摄像头电性相连,所述电源开关与第二电动伸缩杆电性相连,所述第一驱动电机、第一电动伸缩杆、第二驱动电动、第三驱动电机、照明灯板和摄像头均与控制器相连,控制器通过无线传输与控制终端相连。
10.本实用新型的有益效果是:该机器人的优点如下:
11.(1)该机器人灵活性强,功能性强,不仅可以自动在平路上移动,还可以自动爬楼梯;
12.(2)该机器人设有物品存放箱,可以运输快递和食物之类的的物品,无需人们出门,人与人之间做到零接触,适合疫情期间居家隔离的人们使用;
13.(3)该机器人物品存放箱的封盖可以自动打开和关闭,无需手动操作,节省人力,封盖顶部安装有把手,便于手提携带。
附图说明
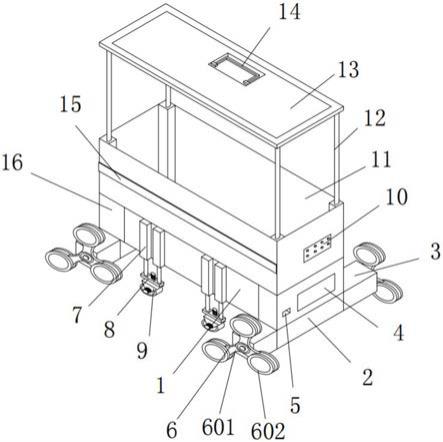
14.图1为本实用新型的结构示意图;
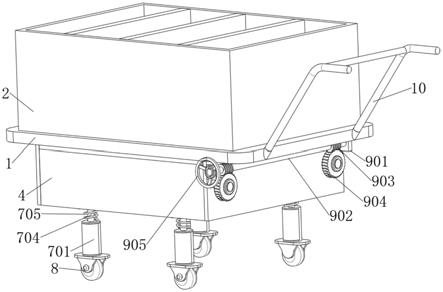
15.图2为本实用新型的局部结构示意图之一;
16.图3为本实用新型的局部结构示意图之二;
17.图4为本实用新型的模块示意图。
18.图中:制动箱1、连接底架2、第一驱动电机3、显示屏4、充电口5、爬梯轮6、三脚架601、第二滚轮602、第一电动伸缩杆7、连接板8、第一滚轮固定架9、电源开关10、物品存放箱11、第二电动伸缩杆12、箱盖13、把手14、荧光板15、控制箱16、第二驱动电动17、第一滚轮18、第三驱动电机19、照明灯板20、摄像头21。
具体实施方式
19.下面结合附图对本实用新型的较佳实施例进行详细阐述,以使本实用新型的优点和特征能更易被本领域人员理解,从而对本实用新型的保护范围做出更为清楚明确的界定。
20.实施例:请参阅图1
‑
4,本实用新型提供一种技术方案:一种能够爬楼梯的轮式机器人,包括制动箱1和物品存放箱11,物品存放箱11内部的四个拐角处均安装有第二电动伸缩杆12,第二电动伸缩杆12的顶部安装有箱盖13,箱盖13的顶部安装有把手14,物品存放箱11的两侧均安装有荧光板15,物品存放箱11的一端安装有电源开关10,物品存放箱11的底
部安装有制动箱1,制动箱1的底部两端均安装有连接底架2,连接底架2的两端均安装有第一驱动电机3,第一驱动电机3的一端安装有爬梯轮6,制动箱1的两侧均安装有第一电动伸缩杆7,第一电动伸缩杆7的底部安装有连接板8,连接板8顶部的中部安装有第二驱动电动17,连接板8的底部安装有第一滚轮固定架9,第一滚轮固定架9的中部安装有第一滚轮18,第一滚轮固定架9的一侧安装有第三驱动电机19,制动箱1的一端安装有控制箱16,控制箱16的一侧安装有摄像头21,摄像头21的两侧均安装有照明灯板20,制动箱1的另一端安装有显示屏4,显示屏4的一侧设有充电口5,制动箱1的内部安装有蓄电池。
21.连接底架2通过螺栓安装在制动箱1底部的两端上,第一驱动电机3通过螺栓安装在连接底架2的两端上,爬梯轮6通过螺栓安装在第一驱动电机3的一端上,爬梯轮6由三脚架601和第二滚轮602组成。
22.第一电动伸缩杆7通过螺栓安装在制动箱1的两侧上,连接板8通过螺栓安装在第一电动伸缩杆7的底部上,第二驱动电动17通过螺栓安装在连接板8顶部的中部上,第一滚轮固定架9通过螺栓安装在连接板8的底部上,第一滚轮18通过连接轴安装在第一滚轮固定架9的中部上,第三驱动电机19通过螺栓安装在第一滚轮固定架9的一侧上。
23.显示屏4通过螺栓安装在制动箱1的一端上,照明灯板20和摄像头21均通过螺栓安装在制动箱1的另一端上,电源开关10通过螺栓安装在物品存放箱11的一端上,荧光板15通过螺栓安装在物品存放箱11的两侧上。
24.第二电动伸缩杆12通过螺栓安装在物品存放箱11内部的四个拐角处,箱盖13通过螺栓安装在第二电动伸缩杆12的顶部上,把手14通过螺栓安装在箱盖13的顶部上。
25.制动箱1内的蓄电池分别与第一驱动电机3、显示屏4、第一电动伸缩杆7、电源开关10、第二驱动电动17、第三驱动电机19、照明灯板20和摄像头21电性相连,电源开关10与第二电动伸缩杆12电性相连,第一驱动电机3、第一电动伸缩杆7、第二驱动电动17、第三驱动电机19、照明灯板20和摄像头21均与控制器相连,控制器通过无线传输与控制终端相连。
26.工作原理:一种能够爬楼梯的轮式机器人,包括制动箱1和物品存放箱11,使用时控制终端通过控制器发送信号,机器人的接收器进行信号接收并传输给机器人上的控制系统,从而控制第一驱动电机3、第一电动伸缩杆7、第二驱动电动17、第三驱动电机19、照明灯板20和摄像头21制动,当机器人水平行驶时,通过第一电动伸缩杆7制动,使第一滚轮18下降与地面接触,将机器人整体撑起,使爬梯轮6离开地面,悬空放置,通过第二驱动电动17制动可以控制第一滚轮18的移动方向,通过第三驱动电机19制动,可以使第一滚轮18自动前进后退,当机器人需要爬楼梯时,通过第一电动伸缩杆7制动使第一滚轮18向上移动离开地面,使爬梯轮6与地面接触,通过第一驱动电机3制动,可以带动爬梯轮6自动向上爬行,通过摄像头21便于控制机器人的人们观察周围环境,方便选择移动方向,通过照明灯板20和荧光板15便于机器人晚间出行,机器人的顶部安装有物品存放箱11,物品存放箱11的封盖通过第二电动伸缩杆12控制,可以自动打开和关闭,第二电动伸缩杆12由电源开关10控制,物品存放箱11内可以放置快递之类的物品,通过把手14使机器人便于携带。
27.该机器人灵活性强,功能性强,不仅可以自动在平路上移动,还可以自动爬楼梯;设有物品存放箱,可以运输快递和食物之类的的物品,无需人们出门,人与人之间做到零接触,适合疫情期间居家隔离的人们使用;物品存放箱的封盖可以自动打开和关闭,无需手动操作,节省人力,封盖顶部安装有把手,便于手提携带。
28.上实施例仅表达了本实用新型的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。