1.本技术涉及智能机器人领域,具体涉及一种自移动机器人。
背景技术:
2.目前自移动机器人已经广泛地应用在用户家庭中,自移动机器人可以提供扫地、擦地或洗地等其中任意一种或多种清洁服务中,例如,扫地机器人、擦地机器人或者擦窗机器人等其中任意一种已经应用于提供清洁服务。自移动机器人可以通过光学传感器的发射管和接收管收发探测信号,以探测周围的环境,对于同一批量的自移动机器人,光学传感器的发射管的发射特性难以保持一致,光学传感器的接收管的接收特性难以保持一致,导致自移动机器人的光学传感器的信号辐值一致性比较差,难以保证同一批量的自移动机器人的光学传感器保持一致的工作性能。
技术实现要素:
3.本技术实施例提供一种自移动机器人,以解决光学传感器的发射管的发射特性难以保持一致,光学传感器的接收管的接收特性难以保持一致,导致自移动机器人的光学传感器的信号辐值一致性比较差的技术问题。
4.本技术实施例提供一种自移动机器人,所述自移动机器人包括机器人主体、行走机构和光学传感器,所述行走机构安装于所述机器人主体上,以使得所述机器人主体通过所述行走机构在地面上行走,所述光学传感器安装于所述机器人主体上,所述光学传感器包括发射管和接收管,以及光路限制结构,所述光路限制结构限定有第一信号通道和第二信号通道,所述第一信号通道对应所述发射管设置,所述第二信号通道对应所述接收管设置,所述第一信号通道的中心线方向与所述第二信号通道的中心线方向呈夹角设置,以使所述光学传感器在对应所述夹角的预设交点位置所采集的信号辐值满足预设信号阈值。
5.区别于现有技术,上述自移动机器人,通过光路限制结构限定有第一信号通道和第二信号通道,第一信号通道对应发射管设置,第二信号通道对应接收管设置,第一信号通道的中心线方向与第二信号通道的中心线方向呈夹角设置,以使光学传感器在对应夹角的预设交点位置所采集的信号辐值满足预设信号阈值,其中,发射管发出的信号在经过反射后以中心入射到接收管正中心中,发射管的发射信号可以在第一信号通道以较小的预设定角度范围发射,接收管的接收信号可以在第二信号通道以较小的预设定角度范围入射,可以实现发射管和接收管具有对应夹角的最强信号路径,在对应夹角的预设交点位置取得稳定且足够强的信号辐值,从而解决光学传感器的发射管的发射特性难以保持一致,光学传感器的接收管的接收特性难以保持一致,导致自移动机器人的光学传感器的信号辐值一致性比较差的技术问题。
附图说明
6.一个或多个实施例通过与之对应的附图中的图片进行示例性说明,这些示例性说
明并不构成对实施例的限定,附图中具有相同参考数字标号的元件表示为类似的元件,除非有特别申明,附图中的图不构成比例限制。
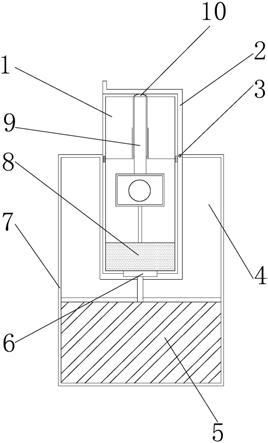
7.图1是本技术实施例提供的一种自移动机器人的结构示意图一;
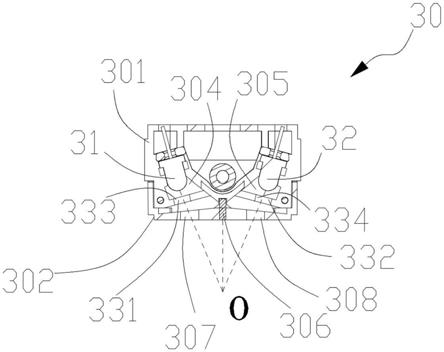
8.图2是本技术实施例提供的一种光学传感器的截面结构示意图一;
9.图3是本技术实施例提供的一种光学传感器的分解结构示意图;
10.图4是本技术实施例提供的一种光学传感器的截面结构示意图二。
具体实施方式
11.为了使本新申请的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本新申请进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本新申请,并不用于限定本新申请。基于本新申请中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本新申请保护的范围。
12.请参阅图1至图4,本技术实施例提供一种自移动机器人100,所述自移动机器人100包括机器人主体10、行走机构20和光学传感器30。所述行走机构20安装于所述机器人主体10上,以使得所述机器人主体10通过所述行走机构20在地面上行走。所述光学传感器30安装于所述机器人主体10上,所述光学传感器30包括发射管31和接收管32,以及光路限制结构33。所述光路限制结构33限定有第一信号通道331和第二信号通道332,所述第一信号通道331对应所述发射管31设置,所述第二信号通道332对应所述接收管32设置,所述第一信号通道331的中心线方向与所述第二信号通道332的中心线方向呈夹角设置,以使所述光学传感器30在对应所述夹角的预设交点位置o所采集的信号辐值满足预设信号阈值。
13.可以理解的是,所述自移动机器人100可以是清洁机器人,例如,所述自移动机器人100可以是扫地机器人、扫拖一体式机器人、拖地机器人、洗地机器人或擦窗机器人等其中任意一种。当然,所述自移动机器人100也可以是非清洁类型的机器人,例如,所述自移动机器人100可以是巡逻机器人或者agv搬运机器人等。
14.区别于现有技术,上述自移动机器人100,通过光路限制结构33限定有第一信号通道331和第二信号通道332,第一信号通道331对应发射管31设置,第二信号通道332对应接收管32设置,第一信号通道331的中心线方向与第二信号通道332的中心线方向呈夹角设置,以使光学传感器30在对应夹角的预设交点位置o所采集的信号辐值满足预设信号阈值,其中,发射管31发出的信号在经过反射后以中心入射到接收管32正中心中,发射管31的发射信号可以在第一信号通道331以较小的预设定角度范围发射,接收管32的接收信号可以在第二信号通道332以较小的预设定角度范围入射,可以实现发射管31和接收管32具有对应夹角的最强信号路径,在对应夹角的预设交点位置o取得稳定且足够强的信号辐值,从而解决光学传感器30的发射管31的发射特性难以保持一致,光学传感器30的接收管32的接收特性难以保持一致,导致自移动机器人100的光学传感器30的信号辐值一致性比较差的技术问题。
15.在本实施方式中,所述机器人主体10为所述自移动机器人100的主体部分,所述机器人主体10可以呈圆形、矩形或d形等任意一种形状,在此不作限定。在一可选实施例中,机器人主体10也可以是其他设计构造,例如,机器人主体10为一体成型结构、左右分离设置的结构,本技术实施例对本体的材料、形状、结构等不做限定。
16.所述机器人主体10可以包括底盘11和上盖组件12,上盖组件12可拆卸地安装于底盘11上,以在使用期间保护自移动机器人100内部的各种功能部件免受激烈撞击或无意间滴洒的液体的损坏;底盘11和/或上盖组件12用于承载和支撑各种功能部件。所述上盖组件12背离所述底盘11的表面形成外观面,可以提升所述自移动机器人的整体外观,外观面上可以设置按键,方便用户通过按键操作所述自移动机器人100。所述底盘11和所述上盖组件12之间形成所述安装腔,所述安装腔用于为所述自移动机器人100的内部器件提供排布空间。所述自移动机器人100可以在所述安装腔中排布真空泵、电路板、地面检测传感器、碰撞检测传感器和沿墙传感器等。
17.所述自移动机器人100包括安装于所述底盘11上的行走机构20,所述行走机构20包括一对行走轮、至少一个万向轮、以及用于带动轮子转动的马达,所述一对行走轮和所述至少一个万向轮至少部分凸伸出所述底盘11的底部,例如,在自移动机器人在自身重量的作用下,所述一对行走轮可以部分地隐藏于底盘11内。在一可选实施例中,所述行走机构20还可以包括三角履带轮、麦克纳姆轮等中的任意一种。所述行走机构20也可以不包括所述至少一个万向轮。
18.所述自移动机器人100可以被设计成自主地在地面上规划路径,也可以被设计成响应于遥控指令在地面上移动。所述自移动机器人100可以通过陀螺仪、加速度计、摄像头、gps定位和/或激光雷达等其中一种或几种的组合进行导航,例如,所述自移动机器人100可以在顶面凸出设置激光雷达,通过激光雷达对周围环境进行扫描采集障碍物数据,根据障碍物数据建立环境地图,可以根据环境地图进行实时定位,便于规划清洁路径。
19.在本实施例中,所述光学传感器30安装于所述机器人主体10的底部,所述发射管31和所述接收管32均朝向所述机器人主体10的底侧方向。在其他实施方式中,所述光学传感器30安装于所述机器人主体10的侧部,所述发射管31和所述接收管32均朝向所述机器人主体10的侧向方向。其中,所述光学传感器30为防跌落传感器,即所述光学传感器30为地检传感器,所述光学传感器30可以持续采集地面信号。所述光学传感器30可检测自移动机器人100的前进方向上是否出现悬空区域(例如,台阶或凹坑等)。当自移动机器人100的前进方向上出现悬空区域时,所述光学传感器30可以响应悬空区域生成悬空提示信号,自移动机器人100可以根据悬崖提示信号采取退后或者换向等动作远离悬空区域,从而防止自移动机器人100从悬空区域跌落。
20.所述光学传感器30的数量可以是一个或多个。例如,多个所述光学传感器30可以布置在所述底盘11的周侧边缘上,便于所述自移动机器人100通过多个所述光学传感器30采集不同位置上的地面信号。
21.所述发射管31为红外信号发射管,则所述发射管31可以对外发射红外信号。所述接收管32为红外信号接收管,则所述接收管32可以对外接收红外信号。所述发射管31所发射的第一信号通过所述第一信号通道331对外发射,第一信号经地面反射形成第二信号,第二信号通过第二信号通道332入射至所述接收管32。在其他实施方式中,所述发射管31也可以为其他类型的发射管,例如,所述发射管31为紫外信号发射管31,对应的,所述接收管32与所述发射管31相适配,所述接收管32可以为紫外信号接收管32。
22.可以理解的,通常所述发射管31具有一定的发射角度,如果多个发射管31的发射特性难以保持一致,则不同发射管31的发射角度也难以保持一致,例如,不同发射管31的发
射角度可以有多种:40
°
、44
°
、50
°
或54
°
等;通常所述接收管32具有一定的发射角度,如果多个接收管32的接收特性难以保持一致,则不同接收管32的接收角度也难以保持一致,例如,不同接收管32的接收角度可以有多种:40
°
、44
°
、50
°
或54
°
等。那么,由于光学传感器30的发射管31的发射特性难以保持一致,光学传感器30的接收管32的接收特性难以保持一致,导致自移动机器人100的光学传感器30的信号辐值一致性比较差,难以保证同一批量的自移动机器人100的光学传感器30保持一致的工作性能。
23.请参阅表1,其中,a组信号辐值数据为改善前一批自移动机器人应用常规光学传感器(未设置光路限制结构)所测得的数据,b组信号辐值数据为改善后同一批自移动机器人应用新的光学传感器(设置光路限制结构)所测得的数据,可以证明本技术的方案对于提升信号辐值一致性具有良好的效果,有利于保证产品的良率。可以看出,a组信号辐值数据难以满足信号辐值一致性的要求,a组信号辐值数据包括多个不满足预设信号阈值的数据,并且,a组信号辐值数据的离散程度较大,信号辐值一致性较差;而改善后的b组信号辐值数据可以满足信号辐值一致性的要求,a组信号辐值数据均满足预设信号阈值,a组信号辐值数据的离散程度相对较小,信号辐值一致性得到提高。其中,在本技术实施方式中采用的预设信号阈值为10
‑
310,当然,在其他实施方式中,预设信号阈值并不局限于上述取值,本领域技术人员可以根据实际需要进行调整。
24.序号a组信号辐值数据b组信号辐值数据预设信号阈值148024010
‑
310240026010
‑
310334025010
‑
310436030010
‑
310538028010
‑
310634030010
‑
310729022010
‑
310830020010
‑
310936028010
‑
3101058032010
‑
3101135017010
‑
3101213020010
‑
3101324021010
‑
310149019010
‑
310
25.表1改善前后两组信号辐值数据的对比测试数据汇总表格
26.可以理解的是,所述第一信号通道331可以为连续的通孔结构,也可以为不连续的通孔结构(例如由不连续的多个第一通孔333组成),所述第一信号通道331也可以包括阶梯孔结构或者锥孔结构。所述第一信号通道331可以有多种结构形式,在此不作限定。
27.请参阅图2至图4,在一些实施方式中,所述第二信号通道332包括对准所述接收管32的第二通孔334,所述第二通孔334的最小直径为2mm
‑
3mm,即所述第二通孔334形成第二光阑结构,则所述接收管32所接收的信号束受到第二通孔334的约束,所述第二通孔334可以限制所述接收管32所接收信号在预设接收角度范围内,从而即使不同的接收管32具有不
同的接收特性,也可以通过第二信号通道332重新定义接收管32的接收角度范围。其中,所述第二通孔334的最小直径可以为2.5mm。当然,在其他实施方式中,本领域技术人员也可以根据需要将所述第二通孔334的最小直径设置为大于3mm或者小于2mm,在此不作限定。
28.可以理解的是,所述第二信号通道332可以为连续的通孔结构,也可以为不连续的通孔结构(例如由不连续的多个第二通孔334组成)。所述第二信号通道332也可以包括阶梯孔结构或者锥孔结构。所述第二信号通道332可以有多种结构形式,在此不作限定。
29.在本实施方式中,所述光学传感器30在对应所述夹角的预设交点位置o所采集的信号辐值满足预设信号阈值。发射管31的发射信号可以在第一信号通道331以较小的预设定角度范围发射,接收管32的接收信号可以在第二信号通道332以较小的预设定角度范围入射,可以实现发射管31和接收管32具有对应夹角的最强信号路径,在对应夹角的预设交点位置o取得稳定且足够强的信号辐值,从而解决光学传感器30的发射管31的发射特性难以保持一致,光学传感器30的接收管32的接收特性难以保持一致,导致自移动机器人100的光学传感器30的信号辐值一致性比较差的技术问题。
30.由于增加了第一信号通道331和第二信号通道332,第一信号通道331和第二信号通道332定义了所述光学传感器30具有对应夹角的最强信号路径,光学传感器30在对应夹角的预设交点位置o取得稳定且足够强的信号辐值,便于所述光学传感器30取得信号辐值保持一致性;并且,所述光学传感器30对所收发信号的传播路径角度变化更加敏感,可以更加准确反应光学传感器30与地面的距离变化,所述光学传感器30在远离预设交点位置o处所采集的信号辐值随距离增加而减少,可以实现所述光学传感器30对地面距离反应更加灵敏,例如,当自移动机器人100远离地面时,光学传感器30与地面的距离明显增加,所述光学传感器30所收发信号的传播路径角度减小,使得所述光学传感器30所采集的信号辐值明显减少。其中,预设信号阈值的具体数值可以根据实际需要进行设置,在此不作具体限定。
31.请参阅图2至图4,进一步地,所述发射管31的中心线与所述第一信号通道331的中心线位于同一直线上,或/和,所述接收管32的中心线与所述第二信号通道332的中心线位于同一直线上。在本实施方式中,所述发射管31的中心线与所述第一信号通道331的中心线位于同一直线上,并且,所述接收管32的中心线与所述第二信号通道332的中心线位于同一直线上,从而所述发射管31的中心线与所述接收管32的中心线呈夹角设置。在其他实施方式中,所述发射管31的中心线相对所述第一信号通道331的中心线偏移,或者,所述接收管32的中心线相对所述第二信号通道332的中心线偏移。
32.请参阅图2至图4,在一些实施方式中,所述预设交点位置o与所述光学传感器30的最小距离满足预设距离阈值,所述预设距离阈值为9mm至11mm,例如,所述预设交点位置o与所述光学传感器30的最小距离可以大致为9mm、10mm或11mm。通过定义所述预设交点位置o与所述光学传感器30的最小距离,使得所述光学传感器30在预设交点位置o具有稳定的信号辐射值,可以保证同一批量中的光学传感器30的辐射一致性。由于发射管31和接收管32具有对应夹角的最强信号路径,当信号采集位置位于预设交点位置o时(即障碍位于预设交点位置o,光学传感器30的信号可在预设交点位置o处反射),所述光学传感器30对应的信号辐射值达到最大,当信号采集位置远离预设交点位置o时(即障碍在远离预设交点位置o的其他位置,光学传感器30的信号可在其他位置处反射),所述光学传感器30的信号辐射值随信号采集位置与预设交点位置o的距离增加而衰减。
33.请参阅图2至图4,在一些实施方式中,定义所述预设交点位置o与所述光学传感器30的距离为第一距离d1,所述光学传感器30安装于所述机器人主体10的底部,所述发射管31和所述接收管32均朝向地面,定义所述光学传感器30与地面的距离为第二距离d2,所述第二距离d2大于所述第一距离d1。其中,所述第二距离d2与所述第一距离d1的差值为9mm至11mm。
34.在本实施方式中,所述预设交点位置o位于所述光学传感器30和地面之间。通过定义所述第二距离d2与所述第一距离d1的差值为9mm至11mm,即所述预设交点位置o与地面的距离为9mm至11mm,例如,所述第二距离d2与所述第一距离d1的差值可以大致为9mm、10mm或11mm,即所述预设交点位置o与地面的距离可以大致为9mm、10mm或11mm。一方面,当自移动机器人100在平整地面上行走时,所述预设交点位置o相对地面悬空预设距离(9mm至11mm),使得所述光学传感器30可以采集正常的地面信号;另一方面,所述预设交点位置o相对地面悬空预设距离可以作为预留安全距离,当自移动机器人100跨越低矮障碍物时,由于通常低矮障碍物具有不平整表面,低矮障碍物不平整表面与所述光学传感器30的距离更为接近,由于预留安全距离的存在,对于高度有限的低矮障碍物靠近预设交点位置o,光学传感器30所采集的信号辐值仍能保持在预设辐值范围内(即保持正常地面检测信号),可以避免障碍物表面与光学传感器30的距离过小导致所述光学传感器30所采集的信号辐值急剧变小的情况,避免进一步误触发机器人躲避动作。
35.请参阅图2至图4,在一些实施方式中,所述第二距离d2大于或者等于所述第一距离d1的两倍。例如,所述第二距离d2大致为20mm,所述第一距离d1大致为10mm;或者,所述第二距离d2大致为35mm,所述第一距离d1大致为11mm。
36.请参阅图2至图4,进一步地,所述光学传感器30包括基座301和与基座301相盖合的透光盖板302,所述基座301和所述透光盖板302围设形成容纳腔303,所述发射管31和所述接收管32均收容于所述容纳腔303内,并朝向所述透光盖板302设置,所述第一信号通道331至少部分设置在所述基座301上,所述第二信号通道332至少部分设置在所述基座301上。
37.在本实施方式中,所述基座301和所述透光盖板302可以对发射管31和接收管32起到容纳作用和保护作用。所述基座301嵌设于所述底盘11上的安装槽处。所述基座301设有并排设置的第一腔室304和第二腔室305。所述发射管31安装于所述第一腔室304中,所述接收管32安装于所述第二腔室305中。所述第一信号通道331连通所述第一腔室304设置。所述第二信号通道332连通所述第二腔室305设置。所述第一信号通道331至少部分由所述基座301内的结构围设形成,所述第二信号通道332至少部分由所述基座301内的结构围设形成。在其他实施方式中,所述第一信号通道331也至少部分由安装于所述基座301内的结构件围设形成,所述第二信号通道332也至少部分由安装于所述基座301内的结构件围设形成。
38.请参阅图2至图4,进一步地,所述光路限制结构33包括隔挡部306,所述隔挡部306分隔在所述第一信号通道331的发射侧和所述第二信号通道332的接收侧之间,所述隔挡部306设置于所述基座301上或者所述透光盖板302上。其中,通过所述隔挡部306分隔在所述第一信号通道331的发射侧和所述第二信号通道332的接收侧之间,可以防止发射信号和入射信号相互串扰。所述隔挡部306可以与所述基座301一体设置,或者,所述隔挡部306可以与所述透光盖板302一体设置,或者,所述隔挡部306可以与所述基座301以及所述透光盖板
302三者为相互独立的部件。
39.请参阅图2至图4,进一步地,所述第一信号通道331包括对准所述发射管31的第一通孔333和对准所述接收管32的第二通孔334,所述透光盖板302设有对准所述第一通孔333的第一透光部307,以及对准所述第二通孔334的第二透光部308,所述第一透光部307与所述第二透光部308的中心距离小于所述第一通孔333与所述第二通孔334的中心距离,所述第一透光部307和所述第一通孔333组成所述第一信号通道331,所述第二透光部308和所述第二通孔334组成所述第二信号通道332。
40.在本实施方式中,所述第一透光部307和所述第一通孔333组成倾斜设置的第一信号通道331,所述第二透光部308和所述第二通孔334组成倾斜设置的第二信号通道332,可以起到筛选特定角度的信号作用。所述光学传感器30在对应所述夹角的预设交点位置o所采集的信号辐值满足预设信号阈值。发射管31的发射信号可以在第一信号通道331以较小的预设定角度范围发射,接收管32的接收信号可以在第二信号通道332以较小的预设定角度范围入射,可以实现发射管31和接收管32具有对应夹角的最强信号路径,在对应夹角的预设交点位置o取得稳定且足够强的信号辐值,从而解决光学传感器30的发射管31的发射特性难以保持一致,光学传感器30的接收管32的接收特性难以保持一致,导致自移动机器人100的光学传感器30的信号辐值一致性比较差的技术问题。
41.所述透光盖板302除所述第一透光部307和所述第二透光部308之外的部分均为非透光部。所述第一透光部307和所述第二透光部308均可以起到透过信号的作用。所述第一透光部307位于所述第一信号通道331的中心线方向上。所述第二透光部308位于所述第二信号通道332的中心线方向上。通过所述第一透光部307与所述第二透光部308的中心距离小于所述第一信号通道331与所述第二信号通道332的中心距离,所述第一透光部307和所述第二透光部308可以起到筛选作用,避免更大角度范围内的光线或信号被所述光学传感器30所采集到,使得所述光学传感器30对所收发信号的传播路径角度变化更加敏感,可以更加准确反应光学传感器30与地面的距离变化。其中,所述第一透光部307和所述第二透光部308的形状可以有多种,例如,圆形、方形或椭圆形等其中任意一种,在此不作限定。
42.一种实施方式中,所述透光盖板302的非透光部可以为混合有色素的塑料材质,所述第一透光部307和所述第二透光部308均为开孔。
43.另一种实施方式中,所述透光盖板302的本体为透光塑料材质,所述透光盖板302的非透光部的表面涂覆有遮光涂层,所述第一透光部307和所述第二透光部308均为开孔,或者,所述第一透光部307和所述第二透光部308均未涂覆遮光涂层。
44.最后应说明的是:以上实施例仅用以说明本新申请的技术方案,而非对其限制;在本新申请的思路下,以上实施例或者不同实施例中的技术特征之间也可以进行组合,步骤可以以任意顺序实现,并存在如上所述的本新申请的不同方面的许多其它变化,为了简明,它们没有在细节中提供;尽管参照前述实施例对本新申请进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本技术各实施例技术方案的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。