1.本发明涉及数控机床精确控制技术领域,特别是涉及一种元动作单元的压电致动振动抑制方法。
背景技术:
2.机电产品在运行时出现各种振动异常与故障则会导致产品维修时间、延误时间的增长,从而降低了产品的可用性和使用效率。蜗杆转动元动作单元作为数控机床上最小的运动单元之一,其可靠性与整机可靠性密切相关。然而影响蜗杆转动元动作单元可靠性的故障一般分为:转速波动异常、轴承与蜗杆连接处运转温度过高、整个元动作单元运转时振动幅值异常,需要一种方法,对元动作单元进行振动抑制,提升元动作单元的可靠性,进而提升数控机床的整机可靠性。
技术实现要素:
3.针对现有技术存在的上述不足,本发明实施的目的在于提供一种元动作单元的压电致动振动抑制方法。
4.为实现以上目的,本发明采用如下技术方案:
5.一种元动作单元的压电致动振动抑制方法,包括以下步骤:
6.1)将数控机床按照fma结构化分解方法直接分解成机械元动作单元;
7.2)按照所述数控机床的需求以及所述机械元动作单元的定义,确定所述机械元动作单元的具体组成;
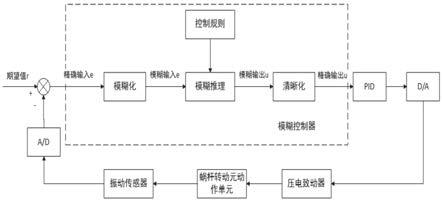
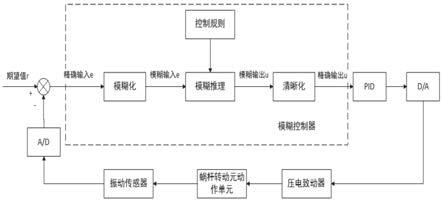
8.3)选取数控机床中蜗杆转动元动作单元作为被控机械元动作单元,系统的运作首先由测量单元测量被控单元运行时产生的振动信号并实时传送到控制单元,经控制单元对测量信号进行模糊化转化为论域的数值,然后运用模糊逻辑和模糊推理进行推论,得到相应的模糊值,再将所得模糊值转经模糊pid控制程序转换为模拟电压控制信号,经功率放大器放大电压之后驱动压电致动器产生抑制信号下达给作动单元,从而实现对被控单元异常振动的抑制。
9.进一步地,所述振动信号,经过信号调理、滤波及a/d转换等处理后,传输到上位机(工控机),由上位机里的labview软件,根据模糊pid自适应的相应算法将得到的数字信号进行快速的计算处理,得到控制信号经d/a转换为模拟电压信号,再经过功率放大后用来驱动压电致动器,利用pvdf薄膜的逆压电效应产生抑制力,来抑制蜗杆转动元动作单元运转过程中产生的振动,完成机械元动作单元工作中的振动抑制。
10.进一步地,所述机械元动作单元的具体组成包括动力源、支撑件、执行件、中间传动和紧固件五部分。
11.进一步地,所述测量单元包括振动传感器。
12.进一步地,应用模糊pid作为压电致动器的控制方法,模糊pid控制器设定为双输入三输出的模式,设计本操作系统的误差e、误差变化率ec以及输出变量的隶属函数都为三
角形隶属度函数,三角形隶属度函数的描述如下:
[0013][0014]
n取3,定义误差e和误差变化率ec的模糊子集为{正大(pb),正中(pm),正小(ps),零(ze),负小(ns),负中(nm),负大(nb)};控制器的关键是找出pid三个参数k
p
、k
i
、k
d
与偏差量e和误差变化率ec之间的模糊关系,利用控制器中模糊控制部分来给pid控制部分的三个参数进行在线实时整定;对模糊控制器的输出进行量化后,得到模糊pid控制器的控制量的模糊子集为{正大(pb),正中(pm),正小(ps),零(ze),负小(ns),负中(nm),负大(nb)}。本发明中,在运行中通过不断检测e和ec,根据控制器的模糊控制规则对pid控制部分的输入量kp、ki、kd,在线的对三个参数进行实时修改,以满足不同时刻偏差量e和误差变化率ec对控制系统的不同要求。
[0015]
优选的,偏差量e的论域作如下模糊分级,为{
‑
6,
‑
5,
‑
4,
‑
3,
‑
2,
‑
1,0,1,2,3,4,5,6},误差变化率ec的论域作如下模糊分级,为{
‑
36,
‑
30,
‑
24,
‑
18,
‑
12,
‑
6,0,6,18,24,30,36},其模糊子集为偏差量e和误差变化率ec都取为{“pb”(正大)、“pm”(正中)、“ps”(正小)、“zo”(零)、“ns”(负小)、“nm”(负中)、“nb”(负大)}。将三个输出量k
p
、k
i
、k
d
的变化范围定义为模糊集合上的论域,分别设定为{
‑
6,
‑
5,
‑
4,
‑
3,
‑
2,
‑
1,0,1,2,3,4,5,6}、{
‑
0.6,
‑
0.5,
‑
0.4,
‑
0.3,
‑
0.2,
‑
0.1,0,0.1,0.2,0.3,0.4,0.5,0.6}、{
‑
6,
‑
5,
‑
4,
‑
3,
‑
2,
‑
1,0,1,2,3,4,5,6},都分成13级;把三个输出量连续变量分成七个等级,k
p
、k
i
、k
d
={“pb”(正大)、“pm”(正中)、“ps”(正小)、“zo”(零)、“ns”(负小)、“nm”(负中)、“nb”(负大)},三个输出量k
p
、k
i
、k
d
的隶属度函数均采用三角隶属度函数。
[0016]
进一步地,模糊pid控制器三个输出为δk
p
,δk
i
,δk
d
,该输出值可以对模糊pid控制器进行修正δk
p
,δk
i
,δk
d
,把三个修正量与原式相加即得到调整后的k
p
,k
i
,k
d
,计算公式如下:
[0017]
k
p
=k
p0
δk
p
.................................................(1
‑
2)
[0018]
k
i
=k
i0
δk
i
....................................................(1
‑
3)
[0019]
k
d
=k
d0
δk
d
.................................................(1
‑
4)
[0020]
进一步地,为了将清晰值转换成模糊输入e、ec,引入量化因子。设误差与误差变化率论域为e=[e
l
,e
h
],ec=[ec
l
,ec
h
],两者对应的模糊论域分别为{
‑
m,
‑
m 1,...,
‑
1,0,1,...,m
‑
1,m},{
‑
n,
‑
n 1,...,
‑
1,0,1,...,n
‑
1,n},两者的量化因子分别为:
[0021][0022][0023]
确定量化因子之后,分别将误差和误差变化率ec的清晰值转换为模糊控制器的模
糊输入e和ec。
[0024][0025][0026]
模糊控制规则由“if...is...,then...is...”语句构成;
[0027]
随后将模糊量转换成精确控制量,给输出量定义语言变量,先将实际输出控制语言变量定义为“控制量u”,然后定义其论域为{
‑
l,
‑
l 1,...,
‑
1,0,1,...,l
‑
1,l},也将u划分为七档,即“正大(pb)”,“正中(pm)”,“正小(ps)”,“零(zo)”,“负小(ns)”“负中(nm)”“负大(nb)”。模糊量清晰化选择重心法,其公式如下:
[0028][0029]
本发明针对整个蜗杆转动元动作单元运转时振动幅值异常,设计了振动监测与智能控制系统,系统控制核心采用压电致动装置结合智能控制算法模糊pid在labview软件中设计编程,利用压电薄膜pvdf的逆压电效应产生抑制力,来抑制蜗杆转动元动作单元运转过程中产生的振动,完成机械元动作单元工作中的振动抑制。进而使得控制系统可针对不同异常情形下不同的异常值进行相应的控制措施,从而保障蜗杆转动元动作单元的正常运转。智能控制系统可提高蜗杆转动元动作单元的可控度,实现无人干预下的异常情形预警与自动调控,从而提高蜗杆转动元动作单元的可靠性,对提高数控机床的可靠性具有重要意义。
附图说明
[0030]
通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
[0031]
图1为驱动器与控制器接线图;
[0032]
图2为振动传感器接线图;
[0033]
图3为模糊pid控制原理框图;
[0034]
图4为模糊控制系统结构图;
[0035]
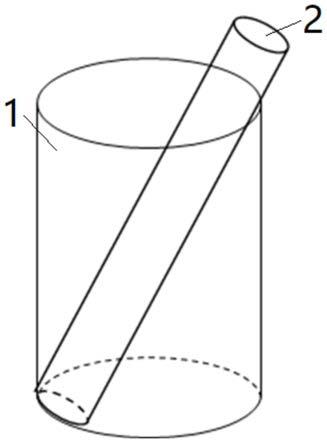
图5为实施例1试验组成示意图。
具体实施方式
[0036]
下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进。这些都属于本发明的保护范围。
[0037]
实施例1
[0038]
如图1~5所示,一种元动作单元的压电致动振动抑制方法,包括以下步骤:
[0039]
1)将数控机床按照fma结构化分解方法直接分解成机械元动作单元;
[0040]
2)按照所述数控机床的需求以及所述机械元动作单元的定义,确定所述机械元动
作单元的具体组成;所述机械元动作单元的具体组成包括动力源、支撑件、执行件、中间传动和紧固件五部分。所述动力源、支撑件、执行件、中间传动和紧固件五部分的功能分别为:所述动力源用于提供蜗杆转动元动作单元运动的动力,包括直接提供动力的电机以及元动作运动输出的动力;所述支撑件用于支撑所述执行件的零件;所述执行件用于元动作的输出,且所述元动作输出的结果包括振动、转速和位移等;所述中间传动用于将所述动力源提供的动力传递给所述执行件;所述紧固件用于对元动作单元进行固定,是安装元动作单元各零件的基础。
[0041]
3)选取数控机床中蜗杆转动元动作单元作为被控机械元动作单元,系统的运作首先由测量单元测量被控单元运行时产生的振动信号并实时传送到控制单元,经控制单元对测量信号进行模糊化转化为论域的数值,然后运用模糊逻辑和模糊推理进行推论,得到相应的模糊值,再将所得模糊值转经模糊pid控制程序转换为模拟电压控制信号,经功率放大器放大电压之后驱动压电致动器产生抑制信号下达给作动单元,从而实现对被控单元异常振动的抑制,所述测量单元包括振动传感器。
[0042]
所述振动信号,经过信号调理、滤波及a/d转换等处理后,传输到上位机(工控机),由上位机里的labview软件,根据模糊pid自适应的相应算法将得到的数字信号进行快速的计算处理,得到控制信号经d/a转换为模拟电压信号,再经过功率放大后用来驱动压电致动器,利用pvdf薄膜的逆压电效应产生抑制力,来抑制蜗杆转动元动作单元运转过程中产生的振动,完成机械元动作单元工作中的振动抑制。
[0043]
硬件系统模块包括被控单元、测量单元、作动单元和控制单元组成,软件系统包括上位机在labview软件中设计的模糊pid控制程序;
[0044]
建立所述蜗杆转动元动作单元的振动抑制试验台模型,之后在所述试验台模型上进行蜗杆转动元动作单元的振动抑制性能测试,并在matlab中进行模拟仿真,用来验证此抑振装置试验方法的有效性。
[0045]
试验台模型包括:稳压电源、电机驱动器、电机、适配器、蜗杆转动元动作单元、压电致动器、功率放大器、振动抑制装置、弹性联轴器、轴承支座、底座、轴承、振动传感器、位移传感器、信号输出电缆、光耦模块、多功能数据采集卡、应用程序开发软件、控制程序、驱动程序软件和信号输出终端。
[0046]
所述稳压电源采用pxn系列线性直流稳压电源rxn
‑
1503d;所述电机及电机驱动器采用德玛克交流伺服电机及相应的b2系列交流伺服驱动器;所述适配器采用ct5200系列恒流适配器;所述元动作单元采用蜗杆转动元动作单元;所述压电致动器采用pvdf薄膜;所述功率放大器采用ye5871型功率放大器,用于振动信号的放大;所述振动抑制装置为滚轴丝杠即相应的b2步进电机;所述弹性联轴器采用梅花型弹性联轴器;所述轴承支座采用t型轴承支座;所述轴承采用6201和6202轴承;所述转速传感器采用dk890光电转速传感器,用于测量转速、周期,且所述转速传感器为npn型;所述振动传感器采用ct1005lc压电式加速度传感器和zmt
‑
yb40磁吸式一体化振动变送器,用于测量速度、加速度以及振动;所述信号输出电缆采用三芯屏蔽线;所述光耦模块采用npn安共阳极接法,其作用是将所述转速传感器的输出信号转为所述多功能数据采集卡能接收到的信号;所述多功能数据采集卡采用美国ni多功能数据采集卡usb
‑
6002daqlabview,并使用计数器模式;所述应用程序开发软件采用应用程序开发软件labview2018;所述控制程序采用模糊pid控制程序;所述驱动程序软
件采用ni
‑
daqmx驱动程序软件;信号输出终端采用电脑。
[0047]
所述转速传感器及信号输出电缆的连接方式为:传感器分别与三芯屏蔽线的线1、线2、线3的一端连接,且线1的另一端连接供电电源的正极,线2的另一端连接供电电源的负极和多功能数据采集卡的负极,线3的另一端连接多功能数据采集卡的正极;所述振动传感器及信号输出电缆连接方式为:直接把振动传感器贴于t型支座的侧面,传感器的棕色线接入dc12
‑
28v的外供电源正,蓝色线接入信号采集通道正,外供电源负端和信号采集通道负端短接。所述供电电源正极接vcc,负极接gnd,输出信号分别为01 、gnd
‑
。
[0048]
具体试验过程如下:
[0049]
选取数控机床中的蜗杆转动元动作单元为实验对象,进行蜗杆转动元动作单元运转过程中的振动抑制实验。本实施例中模拟蜗杆转动元动作单元运转中的三种转速情况分别进行抑振实验,用以模拟机床实际运转时的蜗杆转动元动作单元工作中的三种工况。所模拟转速分别为500r/min,1500r/min,3000r/min。
[0050]
本发明是基于压电材料的逆电压特性,选择模糊pid作为压电致动器的控制方法,完成控制器的结构设计,然后选择模糊pid的隶属函数、建立模糊整定规则,最后应用matlab软件对建立的元动作抑振模型进行仿真分析。
[0051]
为完成系统控制器的结构设计,控制系统融合了传统pid控制和智能控制系统的优点,可以根据系统运动过程中位置反馈信息对操作系统进行pid参数在线修正。模糊pid控制器由pid参数模糊推理和pid调节器两部分构成。模糊pid的误差e和误差变化ec作为模糊推理的输入量,这种输入通过模糊推理后可以满足不同时刻e和ec对控制系统pid自整定参数的要求。
[0052]
应用模糊pid作为压电致动器的控制方法,控制器设定为双输入三输出的模式。设计本操作系统的误差e、误差变化率ec以及输出变量的隶属函数都为三角形隶属度函数。三角形隶属度函数的描述如下:
[0053][0054]
n取3,定义误差e和误差变化率ec的模糊子集为{正大(pb),正中(pm),正小(ps),零(ze),负小(ns),负中(nm),负大(nb)}。控制器的关键是找出pid三个参数k
p
、k
i
、k
d
与偏差量e和误差变化率ec之间的模糊关系,利用控制器中模糊控制部分来给pid控制部分的三个参数进行在线实时整定。对模糊控制器的输出进行量化后,得到模糊pid控制器的控制量的模糊子集为{正大(pb),正中(pm),正小(ps),零(ze),负小(ns),负中(nm),负大(nb)}。本发明中,在运行中通过不断检测e和ec,根据控制器的模糊控制规则对pid控制部分的输入量kp、ki、kd,在线的对三个参数进行实时修改,以满足不同时刻偏差量e和误差变化率ec对控制系统的不同要求,从而使蜗杆转动元动作单元具有良好的动态的适应性、静态的鲁棒性,而且易于控制,计算量小,从而使得响应速度,明显的提高。
[0055]
控制器的结构设计如下:采用模糊pid自适应控制方法进行压电薄膜致动抑振装置的设计,控制系统融合了传统pid控制和智能控制系统的优点,可以根据系统运动过程中位置反馈信息对操作系统进行pid参数在线修正。
[0056]
偏差量e的论域作如下模糊分级,为{
‑
6,
‑
5,
‑
4,
‑
3,
‑
2,
‑
1,0,1,2,3,4,5,6},误差变化率ec的论域作如下模糊分级,为{
‑
36,
‑
30,
‑
24,
‑
18,
‑
12,
‑
6,0,6,18,24,30,36},其模糊子集为偏差量e和误差变化率ec都取为{“pb”(正大)、“pm”(正中)、“ps”(正小)、“zo”(零)、“ns”(负小)、“nm”(负中)、“nb”(负大)}。设定e和ec两个连续变量的隶属度函数均服从三角隶属函数。将三个输出量k
p
、k
i
、k
d
的变化范围定义为模糊集合上的论域,分别设定为{
‑
6,
‑
5,
‑
4,
‑
3,
‑
2,
‑
1,0,1,2,3,4,5,6}、{
‑
0.6,
‑
0.5,
‑
0.4,
‑
0.3,
‑
0.2,
‑
0.1,0,0.1,0.2,0.3,0.4,0.5,0.6}、{
‑
6,
‑
5,
‑
4,
‑
3,
‑
2,
‑
1,0,1,2,3,4,5,6},都分成13级。
[0057]
把三个输出量连续变量分成七个等级,k
p
、k
i
、k
d
={“pb”(正大)、“pm”(正中)、“ps”(正小)、“zo”(零)、“ns”(负小)、“nm”(负中)、“nb”(负大)}。三个输出量k
p
、k
i
、k
d
的隶属度函数均采用三角隶属度函数。
[0058]
本发明中所设计模糊pid控制器有两个输入,三个输出为δk
p
,δk
i
,δk
d
,该输出值可以对模糊pid控制器进行修正δk
p
,δk
i
,δk
d
,把三个修正量与原式相加即得到调整后的k
p
,k
i
,k
d
。计算公式如下:
[0059]
k
p
=k
p0
δk
p
..................................................(1
‑
2)
[0060]
k
i
=k
i0
δk
i
....................................................(1
‑
3)
[0061]
k
d
=k
d0
δk
d
..................................................(1
‑
4)
[0062]
在整定pid参数的过程中,必须考虑到在不同时刻下,三个参数k
p
、k
i
、k
d
的作用以及相互之间的关系。从系统的鲁棒性、响应速度、超调量等方面来考虑,综合pid控制中比例、积分、微分环节各自的作用及特性,总结出偏差e、误差变化率ec和k
p
、k
i
、k
d
三个参数之间关系。
[0063]
(1)当e的值较大时,为了及时得到系统输出响应,提高运行的速度,k
p
应取较大的值,为了加快系统响应,k
d
的值应取较小的;为了避免输出响应的超调量过大,此时不施加积分作用,可取k
i
=0。
[0064]
(2)当e和ec的值大小适中时,为减小系统的超调值,应取较小的k
p
值;在这种情况下,k
d
对系统响应速度有大的影响,ec较小时,k
d
取大些,ec较大时,k
d
取小些,如此可保持系统的响应速度,此时k
i
的值也不应该取的过大,应取适中偏小些。
[0065]
(3)当e值较小时,为使系统有良好的鲁棒性,应取较大的k
p
和k
i
;同时k
d
的取值要恰当,以避免系统在稳定时出现振荡,可以有效的提高系统的抗干扰性,当ec较小时,k
d
取偏大些,当ec较大时,k
d
取小一些。
[0066]
基于上述关系,得到输出变量δk
p
、δk
i
、δk
d
的模糊规则表如下:
[0067]
表1δkp模糊规则表
[0068][0069]
表2δki模糊规则表
[0070][0071]
表3δkd模糊规则表
[0072]
[0073][0074]
为了将清晰值转换成模糊输入e、ec,引入量化因子。设误差与误差变化率论域为e=[e
l
,e
h
],ec=[ec
l
,ec
h
],两者对应的模糊论域分别为{
‑
m,
‑
m 1,...,
‑
1,0,1,...,m
‑
1,m},{
‑
n,
‑
n 1,...,
‑
1,0,1,...,n
‑
1,n},两者的量化因子分别为:
[0075][0076][0077]
确定量化因子之后,分别将误差和误差变化率ec的清晰值转换为模糊控制器的模糊输入e和ec。
[0078][0079][0080]
模糊控制规则由“if...is...,then...is...”语句构成。
[0081]
随后将模糊量转换成精确控制量,给输出量定义语言变量,先将实际输出控制语言变量定义为“控制量u”,然后定义其论域为{
‑
l,
‑
l 1,...,
‑
1,0,1,...,l
‑
1,l},也将u划分为七档,即“正大(pb)”,“正中(pm)”,“正小(ps)”,“零(zo)”,“负小(ns)”“负中(nm)”“负大(nb)”。模糊量清晰化选择重心法,其公式如下:
[0082][0083]
最后利用matlab软件的模糊控制工具箱,对所述元动作单元的压电致动抑振方法中的模糊pid控制器的隶属度函数与控制规则进行设计,再用simulink进行了仿真分析。得出结论:模糊控制实时参数整定使得振动幅值得到较明显抑制,使得蜗杆转动元动作单元振动抑制的智能控制效果相较于传统的人工控制更佳。
[0084]
以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变形或修改,这并不影响本发明的实质内容。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。