1.本发明涉及物流运输技术领域,具体指一种物流转运方法。
背景技术:
2.以人工处理为主导的物流运输、货物搬运行业,需要花费大量的人力和物力,增加了货物运输的成本,同时人工搬运货物的效率非常低,严重影响了货物传输的速度。为了解决这一问题,市场上逐渐出现了无人智能快递车,无人智能快递车上放置用于存取货物的分离式货物储存箱,一个储物箱可以有多个储物空间,一台车可装载多个储物箱,将同类货物存储在一个储物箱中方便进行集中投放。
3.目前市场上无人智能快递车的储物箱大多与车体相连,无法独立工作,而且需要等待收货人前来取件,大大降低了快递车的工作效率。申请公开号为cn108862114a的中国发明专利申请《一种物流货物搬运系统》(申请号:cn201811016664.1)披露了一种能自动搬运储物箱的结构,其包括行走装置、升降装置、抓取装置、旋转举升抓取装置,升降装置固定安装在行走装置上,两个抓取装置分为上下两层分别与升降装置滑动安装,旋转举升抓取装置固定安装在行走装置的后方,通过行走装置运动货物,通过升降装置、抓取装置和旋转举升抓取装置装卸货物。
4.上述结构虽然提高了运动的灵活性和搬运的工作效率,但是,由于其对储物箱的搬运方式是通过机械臂夹取储物箱两侧的方式进行抓取,受储物箱大小及形状的限制,机械臂需要做的体积很大,同时配备用于驱动机械开合的机构,整体结构复杂、庞大、生产及运行成本高;并且,夹取式抓取储物箱,机械臂与储物箱之间易存在滑动,需要在储物箱外壁上设置相应的限位结构,进一步增大了成本投入。
技术实现要素:
5.本发明所要解决的第一个技术问题是针对现有技术的现状,提供一种通过插配限位的方式提取储物箱从而提高对储物箱的提取可靠性,进而简化取货结构、降低设备成本的物流转运方法。
6.本发明所要解决的第二个技术问题是针对现有技术的现状,提供一种提取货物更加灵活、高效的物流转运方法。
7.本发明解决至少一个上述技术问题所采用的技术方案为:
8.一种物流转运方法,该方法采用的物流转运装置包括:
9.基座,具有相邻布置的装载区及存储区;
10.储物箱,用于对货物进行存储,顶部开有插口;
11.传送带,能转动地设于所述存储区并形成循环回路,用于对放置其上的储物箱进行传送;
12.取货臂,能上下移动、左右移动及周向转动地设于所述装载区,位于所述传送带的旁侧;
13.提取组件,设于所述取货臂之下、用于将储物箱提起,所述提取组件具有可伸缩的限位臂,所述限位臂自提取组件中伸出状态下用于与储物箱的内顶壁相互限位,所述限位臂缩回提取组件中状态下允许提取组件穿过插口;
14.所述物流转运方法包括以下步骤:
15.待转运的所述储物箱在传送带上循环传送,当目标储物箱传送到装载区时,所述取货臂通过上下移动、左右移动、周向转动使提取组件与储物箱顶部的插口对齐;
16.下移所述取货臂,将所述提取组件插入储物箱的插口中,并使所述限位臂伸出、与储物箱的内顶壁相抵,此时,上移取货臂将储物箱提起,并进一步通过取货臂左右移动、周向转动,将所述储物箱投放至目标位置;
17.使所述限位臂缩回提取组件中,所述提取组件退出插口,即完成了一次储物箱的转运及投放。
18.在本发明中,所述物流转运装置具有用于驱动取货臂上下移动、左右移动及周向转动的第一驱动机构以及用于驱动传送带运行的第二驱动机构,所述存储区设置有用于检测储物箱位置的传感器,该传感器与所述第一驱动机构、第二驱动机构受控于同一控制系统;
19.当所述传感器检测到储物箱输送到目标位置时,所述第二驱动机构先使传送带停止传送,所述第一驱动机构再驱动取货臂运动至其下的提取组件与储物箱的顶部插口对齐。采用上述结构及配合方式,使转运方法更加智能、方便。
20.优选地,所述储物箱上设置有位置检测器,该位置检测器与所述控制系统电信号连接。储物箱上还可以搭载人脸识别功能等,以便于物流公司管理货柜状态。
21.优选地,所述装载区设置有能左右移动、沿自身轴向转动的支撑臂,所述取货臂能上下移动地设于该支撑臂上。以通过支撑臂的左右移动、周向转动而实现提取组件的左右移动、周向转动,通过取货臂的上下移动实现提取组件的上下移动,满足多维度提货需求。
22.为了便于连接及装配,所述装载区设置有沿左右方向延伸的第一导轨,该第一导轨上设置有能沿该第一导轨往复移动的底盘,底盘的底部设置有能沿第一导轨滚动的滚轮,所述支撑臂的下端通过第一轴承转动连接于底盘上。
23.优选地,所述第一导轨的旁侧设置有平行第一导轨布置的第一丝杆,该第一丝杆能转动地约束在装载区中,所述装载区还设置有与第一丝杆的端部相连接并用于驱动第一丝杆转动的第一驱动件,所述底盘的底部通过第一螺母副与第一丝杆配合连接。上述第一驱动件为电机,该电机的输出端转动,可以通过第一丝杆、第一螺母副的配合驱动底盘沿第一导轨往复移动。
24.为了便于将支撑臂转动连接于底盘上,所述支撑臂包括平行布置的第一竖杆、第二竖杆及连接于第一竖杆、第二竖杆底部的第一转盘,所述底盘的中央部位设置有竖向延伸的第一连接轴,该第一连接轴的外周套置有能相对于第一连接轴转动的轴承,所述第一转盘固定在轴承上并与轴承同步转动。
25.优选地,所述底盘上设置有用于驱动第一转盘转动的第二驱动件,该第二驱动件的输出端上连接有齿轮,相应的,所述第一转盘的上壁面和/或外周壁上成形有与齿轮相啮合传动的齿条。上述第二驱动件为电机,齿轮可以为竖向布置的蜗杆,此时,第一转盘的外周壁形成与蜗杆配合的齿圈,从而驱动第一转盘转动、进而带动支撑臂及取货臂转动;齿轮
也可以为锥齿轮,此时,第一转盘的上表面形成与锥齿轮相配合的齿条,也可以实现第一转盘的转动。
26.优选地,所述第一转盘具有供第一连接轴露出的让位口,所述第一连接轴上转动连接有沿第一竖杆、第二竖杆延伸的第二丝杆,所述取货臂上开有与第一竖杆、第二竖杆导向配合的导向孔,所述取货臂上还设置有能与第二丝杆相配合的第二螺母副,所述第二丝杆通过第三驱动件驱动。上述第三驱动件为电机,该电机设于第一竖杆与第二竖杆之间或者位于底盘的底部,电机的输出端与第二丝杆相连接,用于驱动第二丝杆转动,从而通过第二螺母副驱动取货臂上下移动。
27.优选地,所述支撑臂还包括连接于第一竖杆、第二竖杆顶部的第二转盘,所述基座上设置有支撑架,该支撑架的顶部设置有对应第一导轨布置的第二导轨,该第二导轨的底部连接有能沿第二导轨往复移动的顶盘,所述第二转盘通过第二轴承转动连接于顶盘的底部。上述第二转盘、第二导轨、顶盘等用于对支撑臂的上端进行约束,有利于提高支撑臂左右移动及周向转动的稳定性。
28.在本发明中,所述提取组件包括主体部分及所述的限位臂,所述主体部分内部中空形成用于安装限位臂的容置腔,所述主体部分的侧壁上开有供限位臂自容置腔中伸出的缺口。当限位臂自主体部分的侧部缺口伸出时,可与储物箱的内顶壁相互限位,将储物箱提起,上述结构便于实现限位臂的伸缩。
29.优选地,所述主体部分包括上盖及底盘,所述上盖与底盘上下间隔布置,所述容置腔形成于上盖与底盘之间,所述限位臂能水平移动地设于底盘与上盖之间。上盖与底盘的边缘之间形成缺口,该结构便于为限位臂提供装配空间及伸缩空间。
30.为了实现自动提取货物,所述提取组件还包括用于驱动限位臂水平移动的驱动件,所述驱动件的输出端与限位臂之间通过啮合机构和/或滑动机构配合传动。
31.优选地,所述驱动件具有竖向布置在容置腔中的输出轴,该输出轴上连接有齿轮,所述限位臂朝向齿轮的侧壁形成与齿轮相啮合传动的齿条。通过齿轮与齿条的配合方式实现限位臂的伸缩,结构简单,运行稳定,可靠性好。
32.优选地,所述上盖和/或底盘为圆形,所述的限位臂为三条且均布在齿轮的外周,各所述限位臂随齿轮正转而露出于缺口外、随齿轮反转而缩回缺口内。将限位臂设置为三条,通过调整限位臂长度,可使限位臂在伸出时形成稳定性的三角形限位结构、在回缩时恰好隐藏在容置腔中而不发生干涉,整体结构紧凑、可靠。
33.与现有技术相比,本发明的优点在于:本发明提出了一种新的储物箱取货方式,即通过插配限位的方式提取储物箱,将提取组件插入储物箱的插口中,并使限位臂伸出、与储物箱的内顶壁相抵,可将储物箱提起,在需要将提取组件伸入或退出插口时,使限位臂缩回提取组件中即可;由于该方式不受储物箱尺寸及形状的约束,可将提取结构体积做小,且整个结构大大简化,降低了设备成本;提取组件与储物之间不存在滑动问题,提高了对储物箱的提取可靠性;
34.提取组件通过取货臂的上下移动、左右移动、周向转动,从而实现将提取组件与储物箱顶部的插口对齐,提取货物更加灵活、高效。
附图说明
35.图1为本发明实施例的结构示意图(隐藏驱动结构);
36.图2为图1的部分结构示意图;
37.图3为图2的剖视图(包含驱动结构);
38.图4为图3中a部分的放大图;
39.图5为图3中b部分的放大图;
40.图6为本发明实施例中提取组件与储物箱对齐的状态图(未提取状态);
41.图7为本发明实施例中提取组件与储物箱对齐的状态图(提取状态);
42.图8为本发明实施例中提取组件的结构示意图(隐藏驱动件);
43.图9为图6中提取组件的部分结构配合图;
44.图10为图7中提取组件的部分结构配合图。
具体实施方式
45.以下结合附图实施例对本发明作进一步详细描述。
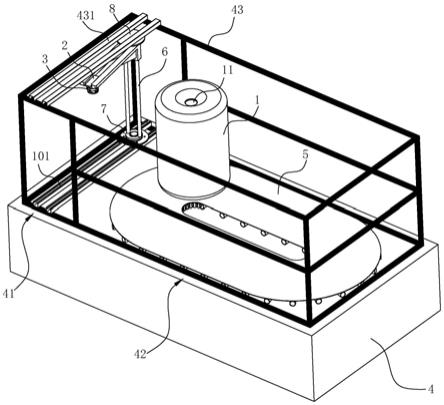
46.如图1~10所示,本实施例的物流转运方法需要在特定装置的配合下实现。本实施例所采用的物流转运装置包括基座4、储物箱1、传送带5、取货臂2及提取组件3。其中,基座4具有相邻布置的装载区41及存储区42。储物箱1用于对货物进行存储,顶部开有插口11。传送带5能转动地设于存储区42并形成循环回路,用于对放置其上的储物箱1进行传送,本实施例传送带5结构为现有成熟技术,在此不做赘述。取货臂2 能上下移动、左右移动及周向转动地设于装载区41,位于传送带5的旁侧;提取组件3 设于取货臂2之下、用于将储物箱1提起。
47.在本实施例中,提取组件3具有可伸缩的限位臂31,限位臂31自提取组件3中伸出状态下用于与储物箱1的内顶壁相互限位,限位臂31缩回提取组件3中状态下允许提取组件3穿过插口11。
48.本实施例的提取组件3包括主体部分及限位臂31、驱动件34,主体部分内部中空形成用于安装限位臂31的容置腔30,主体部分的侧壁上开有供限位臂31自容置腔30 中伸出的缺口300。当限位臂31自主体部分的侧部缺口300伸出时,可与储物箱1的内顶壁相互限位,将储物箱1提起,上述结构便于实现限位臂31的伸缩。
49.具体的,主体部分包括上盖32及底盘33,上盖32与底盘33上下间隔布置,容置腔30形成于上盖32与底盘33之间,限位臂31能水平移动地设于底盘33与上盖32之间。上盖32与底盘33的边缘之间形成缺口300,该结构便于为限位臂32提供装配空间及伸缩空间。
50.上述驱动件34用于驱动限位臂31水平移动,驱动件34的输出端与限位臂31之间通过啮合机构和/或滑动机构配合传动。以下示出一种啮合机构的配合传动方式,但本领域的技术人员应当理解,在本发明的构思基础上,采用导向臂与滑动柱滑动配合以实现传动的方式也容易实现。驱动件34具有竖向布置在容置腔30中的输出轴341,该输出轴341上连接有齿轮342,限位臂31朝向齿轮342的侧壁形成与齿轮342相啮合传动的齿条311。通过齿轮342与齿条311的配合方式实现限位臂31的伸缩,结构简单,运行稳定,可靠性好。
51.驱动件34为电机,该电机设于上盖32上,上盖32的中央部位开有供输出轴341 穿过的轴孔321。上盖32、底盘33通过设于其边缘处的连接臂35约束在取货臂2的下壁面上,连
接臂35为三条,连接臂35与底盘33、取货臂2可采用螺钉连接、焊接等方式进行固定。
52.本实施例的上盖32、底盘33为圆形,限位臂31为三条且均布在齿轮342的外周,各限位臂31随齿轮342正转而露出于缺口300外、随齿轮342反转而缩回缺口300内。这里说的正向与反向不是指顺时针与逆时针,而仅仅是用于支出方向的相对性。将限位臂31设置为三条,通过调整限位臂31长度,可使限位臂31在伸出时形成稳定性的三角形限位结构、在回缩时恰好隐藏在容置腔30中而不发生干涉,整体结构紧凑、可靠。
53.底盘33的上壁面上开有沿限位臂31的移动轨迹延伸、用于对限位臂31导向限位的滑槽。该结构有利于提高限位臂31水平移动的稳定性,避免卡止或移动不畅,提高取货效率。
54.在本实施例中,储物箱1的顶壁局部下凹形成锥形部12,插口11开设于该锥形部 12的中央部位,并且,插口11的下边缘处设置有沿周向布置的加强筋111。该结构有利于提高储物箱1的稳固性,避免长期与提取组件3配合而发生破损。
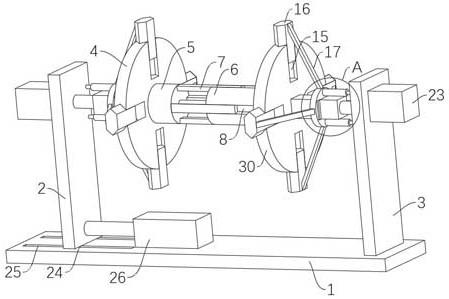
55.在本实施例中,装载区41设置有能左右移动、沿自身轴向转动的支撑臂6,取货臂2能上下移动地设于该支撑臂6上。以通过支撑臂6的左右移动、周向转动而实现提取组件3的左右移动、周向转动,通过取货臂2的上下移动实现提取组件3的上下移动,满足多维度提货需求。
56.为了便于连接及装配,装载区41设置有沿左右方向延伸的第一导轨101,该第一导轨101上设置有能沿该第一导轨101往复移动的底盘7,底盘7的底部设置有能沿第一导轨101滚动的滚轮71,支撑臂6的下端通过第一轴承100转动连接于底盘7上。
57.第一导轨101的旁侧设置有平行第一导轨101布置的第一丝杆102,该第一丝杆102 通过其两端的支撑座及轴承能转动地约束在装载区41中,装载区41还设置有与第一丝杆102的端部相连接并用于驱动第一丝杆102转动的第一驱动件10,底盘7的底部通过第一螺母副72与第一丝杆102配合连接。上述第一驱动件10为电机,该电机的输出端转动,可以通过第一丝杆102、第一螺母副72的配合驱动底盘7沿第一导轨101往复移动。
58.为了便于将支撑臂6转动连接于底盘7上,支撑臂6包括平行布置的第一竖杆61、第二竖杆62及连接于第一竖杆61、第二竖杆62底部的第一转盘63,底盘7的中央部位设置有竖向延伸的第一连接轴73,该第一连接轴73的外周套置有能相对于第一连接轴73转动的第一轴承100,第一转盘63固定在第一轴承100上并与第一轴承100同步转动。
59.底盘7上设置有用于驱动第一转盘63转动的第二驱动件20,该第二驱动件20的输出端上连接有齿轮201,相应的,第一转盘63的上壁面和/或外周壁上成形有与齿轮 201相啮合传动的齿条。上述第二驱动件20为电机,齿轮201侧部可以连接竖向布置的蜗杆202,此时,第一转盘63的外周壁形成与蜗杆202配合的齿圈,从而驱动第一转盘 63转动、进而带动支撑臂6及取货臂2转动;齿轮也可以为锥齿轮,此时,第一转盘63的上表面形成与锥齿轮相配合的齿条,也可以实现第一转盘63的转动。本实施例优选采用蜗杆与齿圈的配合方式。
60.第一转盘63具有供第一连接轴73露出的让位口631,第一连接轴73上转动连接有沿第一竖杆61、第二竖杆62延伸的第二丝杆301,取货臂2上开有与第一竖杆61、第二竖杆62导向配合的导向孔,取货臂2上还设置有能与第二丝杆301相配合的第二螺母副22,第二螺母副22可以与取货臂2成形为一体,第二丝杆301通过第三驱动件30驱动。上述第三驱动件30为电机,该电机设于第一竖杆61与第二竖杆62之间或者位于底盘7的底部,电机的输出端
与第二丝杆301相连接,用于驱动第二丝杆301转动,从而通过第二螺母副22驱动取货臂2上下移动。
61.本实施例的支撑臂6还包括连接于第一竖杆61、第二竖杆62顶部的第二转盘64,基座4上设置有支撑架43,该支撑架43的顶部设置有对应第一导轨101布置的第二导轨431,该第二导轨431的底部连接有能沿第二导轨431往复移动的顶盘8,第二转盘 64通过第二轴承65转动连接于顶盘8的底部。上述第二转盘64、第二导轨431、顶盘 8等用于对支撑臂6的上端进行约束,有利于提高支撑臂6左右移动及周向转动的稳定性。
62.本实施例的存储区42设置有用于检测储物箱1位置的传感器、用于驱动传送带5 运行的第二驱动机构以及用于驱动取货臂2上下移动、左右移动及周向转动的第一驱动机构,第一驱动机构包括第一驱动件10、第二驱动件20、第三驱动件30及相应的传动结构,传感器与第一驱动件10、第二驱动件20、第三驱动件30、驱动件34、第二驱动机构受控于同一控制系统。
63.本实施例的物流转运方法为:
64.待转运的储物箱1在传送带5上循环传送,当目标储物箱1传送到装载区41,传感器检测到储物箱1输送到目标位置时,第二驱动机构先使传送带停止传送,第一驱动机构再驱动取货臂2运动至其下的提取组件3与储物箱1的顶部插口11对齐;
65.下移取货臂2,将提取组件3插入储物箱1的插口11中,并使限位臂31伸出、与储物箱1的内顶壁相抵,此时,上移取货臂2将储物箱1提起,并进一步通过取货臂2 左右移动、周向转动,将所述储物箱1投放至目标位置;
66.使限位臂31缩回提取组件3中,提取组件3退出插口11,即完成了一次储物箱2 的转运及投放。
67.上述储物箱1上设置有位置检测器,该位置检测器与控制系统电信号连接。储物箱 1上还可以搭载人脸识别功能等,以便于物流公司管理货柜状态。
68.在本发明的说明书及权利要求书中使用了表示方向的术语,诸如“前”、“后”、“上”、“下”、“左”、“右”、“侧”、“顶”、“底”等,用来描述本发明的各种示例结构部分和元件,但是在此使用这些术语只是为了方便说明的目的,是基于附图中显示的示例方位而确定的。由于本发明所公开的实施例可以按照不同的方向设置,所以这些表示方向的术语只是作为说明而不应视作为限制,比如“上”、“下”并不一定被限定为与重力方向相反或一致的方向。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。