一种扭环式抓取机械手
1.技术领域
2.本发明涉及一种扭环式抓取机械手,属于机械手技术领域。
背景技术:
3.在工业自动化领域,对于杯子等立式柱状物抓取经常使用气动柔性机械手实现抓取动作,但是目前的柔性机械手的结构较为复杂,加工生产成本较高,在柔性气动机械手内的进气、通气管路的连接和结构较为复杂,安装和维护的难度较高,可靠性低,而且控制抓取方向的结构较为复杂,安装和拆卸都浪费时间,并且自由度低,在抓取杯壁等环形件的时候操作较为复杂,抓取搬运的效率和效果差。
技术实现要素:
4.本发明的目的在于提供一种扭环式抓取机械手,以解决现有机械手抓取杯壁等环形件的时候操作较为复杂,抓取搬运的效率和效果差的缺陷。
5.一种扭环式抓取机械手,包括:摆动机构,所述摆动机构的动力输出端连接有莫比乌斯环;摆动滑套,所述摆动滑套与莫比乌斯环滑动连接;基板,所述基板底部设有导座,所述导座设有竖直卡槽与水平卡槽;所述竖直卡槽用于与摆动滑套活动连接,所述水平卡槽用于卡设莫比乌斯环;所述摆动滑套设有手爪。
6.进一步地,所述莫比乌斯环的中心设有中心套,所述中心套通过辐条与莫比乌斯环连接;所述中心套与摆动机构的动力输出端连接。
7.进一步地,所述莫比乌斯环的截面为六边形,包括三条直线边和三个圆弧边相间首尾连接;三段所述圆弧边的圆心重合,三条所述直线边间的夹角都为度。
8.进一步地,所述导座包括u型卡板一、u型卡板二和顶板;所述u型卡板一和u型卡板二平行设置在顶板底部,并形成竖直卡槽,所述顶板与基板固定联结,所述水平卡槽设在u型卡板一和u型卡板二上。
9.进一步地,所述手爪下端内侧设有柔性垫块。
10.进一步地,所述水平卡槽的槽宽大于莫比乌斯环的截面直径。
11.与现有技术相比,本发明所达到的有益效果:本发明中机械手通过摆动机构带动莫比乌斯环驱动手爪张开或收拢,结构简单,稳定性高;本发明中莫比乌斯环驱动的夹爪具有自锁功能,停气或者断电后,物体不会掉落;控制操作方便,效率高。
附图说明
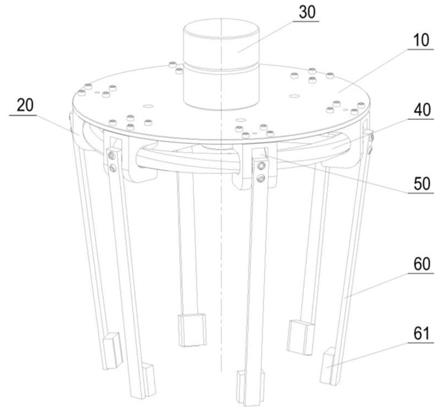
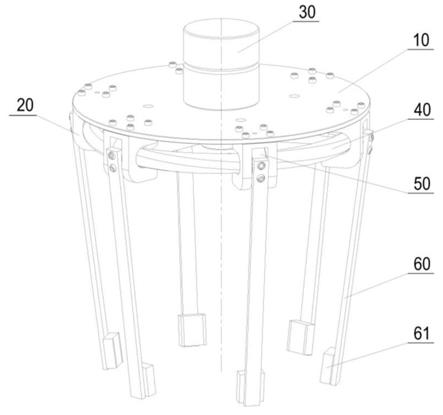
12.图1是本发明机械手整体示意图;图2是本发明机械手抓取状态局部剖视图;图3是本发明机械手张开状态局部剖视图;图4是本发明莫比乌斯环及摆动滑套示意图;图5是本发明莫比乌斯环示意图;图6是本发明导座示意图;图中:10、基板;20、导座;30、摆动气缸;40、莫比乌斯环;50、摆动滑套;60、手爪;20、导座;21、u型卡板一;22、u型卡板二;23、顶板;24、竖直卡槽;25、水平卡槽;41、截面;42、圆弧;43、直线;44、中心套;45、辐条;60、手爪;61、柔性垫块。
具体实施方式
13.为使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
14.如图1
‑
图6所示,公开了一种扭环式抓取机械手,包括:摆动机构,所述摆动机构的动力输出端连接有莫比乌斯环40;其中摆动机构采用摆动气缸30,也可以采用电机;摆动滑套50,所述摆动滑套50与莫比乌斯环40滑动连接;图例中六个摆动滑套50均布滑动套设在莫比乌斯环40上。各摆动滑套50上设有滑槽,其滑槽的截面形状与莫比乌斯环40的截面形状相匹配。摆动滑套50可以做成组合式,以方便安装到莫比乌斯环40上。
15.基板10,所述基板10底部设有导座20,所述导座20设有竖直卡槽24与水平卡槽25;所述竖直卡槽24用于与摆动滑套50活动连接,所述水平卡槽25用于卡设莫比乌斯环40;所述水平卡槽25的槽宽大于莫比乌斯环40的截面直径;所述摆动滑套50设有手爪60。
16.摆动气缸30(或者电机)的输出轴带动莫比乌斯环40顺时针转动,手爪60收拢夹紧物体;摆动气缸30的输出轴带动莫比乌斯环40逆时针转动,手爪60张开松开物体;在本实施例中进一步说明摆动机构与莫比乌斯环40驱动的原理:所述莫比乌斯环40的中心设有中心套44,所述中心套44通过辐条45与莫比乌斯环40连接;所述中心套44与摆动机构的动力输出端连接。
17.在本实施例中对莫比乌斯环40进一步阐述,所述莫比乌斯环40的截面41为六边形,包括三条直线边43和三个圆弧边42相间首尾连接;三段所述圆弧边42的圆心重合,或者说是一个圆的三段圆弧。三条直线边43为截面41的主要面,三条所述直线边43间的夹角都为60度;截面41沿环40的中心轴线回转一周的同时绕自身中心旋转若干圈(一圈或者两圈等,图例为一圈),形成莫比乌斯环。
18.在本实施例中,莫比乌斯环的截面也可以是其它能够实现该功能的截面形状。
19.在本实施例中,所述导座20包括u型卡板一21、u型卡板二22和顶板23;所述u型卡板一21和u型卡板二22平行设置在顶板23底部,并形成竖直卡槽24,所述顶板23与基板10固定联结,所述水平卡槽25设在u型卡板一21和u型卡板二22上;摆动机构在动作时,通过中心套44带动莫比乌斯环40转动,由于摆动滑套50受到竖直卡槽24的限制,做摆动动作,从而带动机械手60摆动。
20.在抓取杯体时,为了减少破坏,在手爪60下端内侧设有柔性垫块61。
21.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
技术特征:
1.一种扭环式抓取机械手,其特征在于,包括:摆动机构,所述摆动机构的动力输出端连接有莫比乌斯环(40);摆动滑套(50),所述摆动滑套(50)与莫比乌斯环(40)滑动连接;基板(10),所述基板(10)底部设有导座(20),所述导座(20)设有竖直卡槽(24)与水平卡槽(25);所述竖直卡槽(24)用于与摆动滑套(50)活动连接,所述水平卡槽(25)用于卡设莫比乌斯环(40);所述摆动滑套(50)设有手爪(60)。2.根据权利要求1所述的扭环式抓取机械手,其特征在于,所述莫比乌斯环(40)的中心设有中心套(44),所述中心套(44)通过辐条(45)与莫比乌斯环(40)连接;所述中心套(44)与摆动机构的动力输出端连接。3.根据权利要求1所述的扭环式抓取机械手,其特征在于,所述莫比乌斯环(40)的截面(41)为六边形,包括三条直线边(43)和三个圆弧边(42)相间首尾连接;三段所述圆弧边(42)的圆心重合,三条所述直线边(43)间的夹角都为60度。4.根据权利要求1所述的扭环式抓取机械手,其特征在于,所述导座(20)包括u型卡板一(21)、u型卡板二(22)和顶板(23);所述u型卡板一(21)和u型卡板二(22)平行设置在顶板(23)底部,并形成竖直卡槽(24),所述顶板(23)与基板(10)固定联结,所述水平卡槽(25)设在u型卡板一(21)和u型卡板二(22)上。5.根据权利要求1所述的扭环式抓取机械手,其特征在于,所述手爪(60)下端内侧设有柔性垫块(61)。6.根据权利要求1所述的扭环式抓取机械手,其特征在于,所述水平卡槽(25)的槽宽大于莫比乌斯环(40)的截面直径。
技术总结
本发明公开了一种扭环式抓取机械手,包括:摆动机构,所述摆动机构的动力输出端连接有莫比乌斯环;摆动滑套,所述摆动滑套与莫比乌斯环滑动连接;基板,所述基板底部设有导座,所述导座设有竖直卡槽与水平卡槽;所述竖直卡槽用于与摆动滑套活动连接,所述水平卡槽用于卡设莫比乌斯环;所述摆动滑套设有手爪;本发明中机械手通过摆动机构带动莫比乌斯环驱动手爪张开或收拢,结构简单,稳定性高;本发明中莫比乌斯环驱动的夹爪具有自锁功能,停气或者断电后,物体不会掉落;控制操作方便,效率高。效率高。效率高。
技术研发人员:刘晓强 钱健 姚辰午
受保护的技术使用者:南京信息职业技术学院
技术研发日:2021.09.30
技术公布日:2021/12/3
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。