1.本发明属于无人机智能充电领域,特别涉及用于无人机充电、遥感图像采集和存储的系统及方法。
背景技术:
2.无人驾驶飞机简称“无人机”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作。无人机按应用领域,可分为军用与民用。民用方面,无人机与行业应用结合,是无人机真正的刚需;目前在航拍、农业、植保、微型自拍、快递运输、灾难救援、观察野生动物、监控传染病、测绘、新闻报道、电力巡检、救灾、影视拍摄、制造浪漫等等领域的应用,大大的拓展了无人机本身的用途,发达国家也在积极扩展行业应用与发展无人机技术。由于受电池现有技术限制,以电池作为动力源的无人机作业时间一般为30分钟或以下。因此无人机进行短时间作业后,都需要飞回人工所在地点进行更换电池或充电,然后继续作业。尤其是在水上作业环境,极易导致因电量不够使得无人机坠入水中的弊端;这种人工参与度的程度增加,无人机在行业应用中的综合成本就会提高,难以突出无人机的优势。
3.可见,对于无人机的续航问题而言,由于受电池现有技术限制,无人机的工作时间达到机载电池的续航时间以后即需要返回人工所在地进行充电,具有人工参与度高、充电不方便的技术问题,尤其是在水上作业环境,极易导致因电量不够使得无人机坠入水中的弊端。
4.也即,对于无人机的续航问题而言,如何提高无人机自动续航能力,是本领域技术人员亟需解决的技术问题。
技术实现要素:
5.为了解决上述问题,本发明的第一方面提供一种用于无人机充电、遥感图像采集和存储的系统。
6.为至少解决上述部分技术问题,第一方面,本发明提出一种用于无人机充电、遥感图像采集和存储的系统,其特征在于,所述系统包括:箱体,所述箱体为上部敞口且其内部具有一容纳腔体,所述敞口通过一对舱门进行开启和关闭,所述舱门上设置有太阳能电池板;停机平台,所述停机平台通过一升降装置设置在所述容纳腔体内,所述停机平台通过所述升降装置的伸长使所述停机平台可伸出所述敞口,所述停机平台通过所述升降装置的收缩使所述停机平台收缩进所述容纳腔体;吃排水装置,所述吃排水装置设置在所述箱体内;所述吃排水装置包括水泵、压载水箱和高压气箱,所述压载水箱对应连接所述水泵与所述高压气箱,所述压载水箱通过所述水泵的抽水动作使所述箱体下沉,所述压载水箱通过所述高压气箱的充气动作使所述箱体上浮;水上驱动装置,用于驱动所述箱体在水中发生位移;电源,所述电源设置在所述箱体内,用于对飞行至所述容纳腔体内的所述无人机进行充电;控制装置,所述控制装置对应与所述升降装置、所述吃排水装置、所述水上驱动装置和
所述电源连接;所述控制装置包括通信组件、探测和数据存储组件和控制组件;所述通信组件设置在所述箱体内,用于与所述无人机和远程终端发生信息交互;所述探测和数据存储组件设置在所述箱体内,用于获取和检测所述无人机的位置,并将所述位置的坐标信息发送至所述控制组件;所述控制组件设置在所述箱体内,用于接收所述位置的坐标信息,并依据所述位置的坐标信息控制所述箱体移动至该所述位置处,以及所述控制组件还用于控制所述吃排水装置动作使所述箱体下沉或上浮;其中,所述探测和数据存储组件通过所述通信组件接收所述无人机的所述坐标信息;所述控制组件依据所述坐标信息控制所述水上驱动装置,以驱动所述箱体移动至所述位置处;所述控制组件依据所述坐标信息控制所述吃排水装置动作使所述箱体上浮至水面,以接收所述无人机飞行至所述容纳腔体中;以及所述箱体上浮至水面接收所述无人机后,所述控制组件控制所述吃排水装置动作使所述箱体下沉至水下。
7.在第一方面中,所述敞口的一对相对立的棱边上对应设置有一对导轨,所述一对舱门对应设置在一对所述导轨上,并可沿所述导轨进行滑动。
8.在第一方面中,所述停机平台包括一底座和围绕所述底座的上边缘周向设置的筒状护套,所述底座与所述护套整体呈碗状,所述底座远离护套的一面与所述升降装置连接,其中,当所述无人机位于所述停机平台内时,所述停机平台的护套高度高于所述无人机的高度。
9.在第一方面中,所述水上驱动装置包括:驱动电机、螺旋桨和方向控制装置,所述驱动电机位于所述箱体内,所述驱动电机的驱动轴穿设出所述箱体的侧壁位于所述箱体的外部,并与所述螺旋桨及方向控制装置连接。
10.在第一方面中,所述系统还包括:密封壳体,所述密封壳体设置在所述箱体内,用于将所述电源、控制装置和驱动电机密封在内。
11.在第一方面中,所述探测和数据存储组件包括:激光雷达、摄像头以及数据存储装置;所述激光雷达和摄像头用于检测无人机的位置,所述数据存储装置用于转存所述无人机采集的遥感图像信息。
12.第二方面,本发明提供了一种用于无人机充电、遥感图像采集和存储的方法,用于上述任一所述的用于无人机充电、遥感图像采集和存储的系统;所述方法包括:获取无人机的当前电量信息;依据所述当前电量信息判断所述无人机是否需要充电;若是,则获取无人机的当前坐标信息;所述获取无人机的坐标信息包括:控制探测和数据存储组件通过通信组件接收所述无人机的所述当前坐标信息;依据所述当前坐标信息控制水上驱动装置,以驱动系统的箱体移动至所述当前坐标信息所对应的水面坐标位置处;依据所述水面坐标信息控制吃排水装置动作使所述箱体上浮至水面,以接收所述无人机飞行至箱体中;其中,当所述箱体上浮至水面接收所述无人机后,控制所述吃排水装置动作使所述箱体下沉至水下。
13.在第二方面中,所述方法还包括:在所述箱体的顶部设置一敞口;在所述敞口的一对相对立的棱边上对应设置一对导轨,并将一对舱门对应设置在一对所述导轨上,以使所述一对舱门可对应沿一对所述导轨进行滑动。
14.在第二方面中,所述方法还包括:在所述箱体内设置一停机平台;将停机平台设置为一底座和围绕所述底座的上边缘周向设置的筒状护套,所述底座与所述护套整体呈碗
状,且将所述底座远离护套的一面与所述升降装置连接,其中,当所述无人机位于所述停机平台内时,所述停机平台的护套高度高于所述无人机的高度。
15.在第二方面中,所述方法还包括:将所述水上驱动装置配置为驱动电机和螺旋桨,并将所述驱动电机设置在所述箱体内,以及将所述驱动电机的驱动轴穿设出所述箱体的侧壁位于所述箱体的外部,并与所述螺旋桨驱动连接。
16.在第二方面中,所述获取无人机的当前电量信息之前,所述方法还包括:接收所述无人机发送的请求指令;所述请求指令用于表示所述无人机的充电请求指令;依据所述请求指令获取所述无人机的型号;判断所述无人机的所述型号是否为预设数据库内的目标无人机型号;若是,则判断所述无人机为需要充电的目标无人机;若否,则判断所述无人机为待定无人机,并将所述待定无人机的型号通过通信组件发送至远程终端;接收所述远程终端发送的指令信息;所述指令信息是所述远程终端依据所述待定无人机的型号判断所述待定无人机是否为可进行充电的信息;若是,将所述可进行充电的所述待定无人机的型号更新至所述预设数据库中。
17.在第二方面中,当所述目标无人机多架时,所述获取无人机的当前电量信息,依据所述当前电量信息判断所述无人机是否需要充电包括:获取多架所述目标无人机的当前电量信息;依据所述当前电量信息对所述目标无人机的充电顺序进行优先级排序,所述优先级排序是按照电量从小到大进行排序;对多架所述目标无人机按照所述优先级排序依次进行充电。
18.在第二方面中,若所述指令信息是所述远程终端依据所述待定无人机的型号判断所述待定无人机不是可进行充电的信息;则将所述待定无人机的请求指令和所述待定无人机的型号发送至预设范围内的其他所述用于无人机充电、遥感图像采集和存储的系统。
19.有益效果:本发明提供了一种用于无人机充电、遥感图像采集和存储的系统,通过在箱体内设置一容纳腔体,并在腔体内设置有电源、吃排水装置、水上驱动装置和控制装置,当无人机在水上飞行需要充电时,可向设置在箱体内的控制装置发送充电请求指令,当控制装置接收到请求指令后,即可控制检测无人机的位置坐标信息,并依据位置坐标信息控制箱体向位置坐标处移动,其中,控制箱体向位置坐标处移动具体包括:先控制吃排水装置的水泵向压载水箱内抽水,使得箱体的重量增加并下沉至水中,然后在控制水上驱动装置驱动箱体朝向无人机的位置坐标移动,使得无人机在原飞行的位置即可就近降落至箱体进行自动充电以及遥感图像数据转存,而不需要重新返回特定的固定充电站点通过人工进行充电,进而降低飞行成本和人工成本。
附图说明
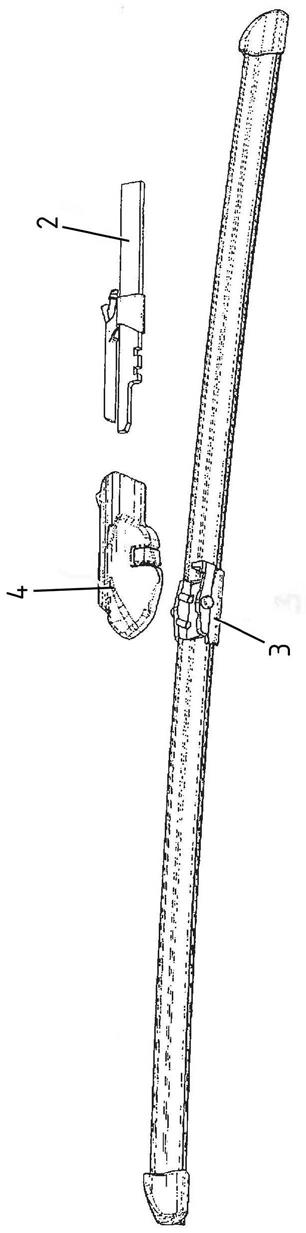
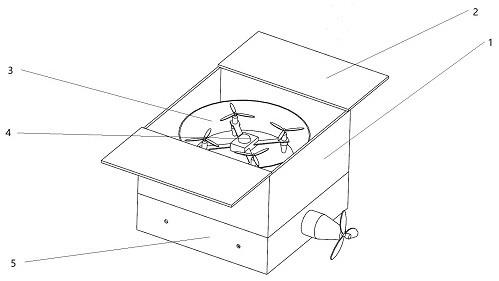
20.图1为本实施一中用于无人机充电、遥感图像采集和存储的系统的结构图一;图2为本实施一中用于无人机充电、遥感图像采集和存储的系统的局部结构图二;图3为本实施一中升降装置伸出使停机平台伸出容纳腔体的结构图;图4位本实施例二中用于无人机充电、遥感图像采集和存储的方法流程框图;附图标记说明:1、箱体;
2、舱门;3、停机平台;4、无人机;5、吃排水装置;6、驱动电机;7、螺旋桨;8、吃排水孔;9、导管;10、水泵;11、通信组件;12、探测和数据存储组件;13、电源。
具体实施方式
21.下面将结合本说明书实施例中的附图,对本说明书实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本说明书一部分实施例,而不是全部的实施例。基于本说明书中的实施例,本领域普通技术人员所获得的所有其他实施例,都属于本发明保护的范围。
22.同时,本说明书实施例中,当组件被称为“固定于”另一个组件,它可以直接在另一个组件上或者也可以存在居中组件。当一个组件被认为是“连接”另一个组件,它可以是直接连接到另一个组件或者可能同时存在居中组件。当一个组件被认为是“设置于”另一个组件,它可以是直接设置在另一个组件上或者可能同时存在居中组件。本说明书实施例中所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明目的,并不是旨在限制本发明。
23.实施例一:如图1至图3所示,本发明提出一种用于对无人机4飞行监测充电的系统,所述系统包括: 箱体1、停机平台3、吃排水装置5、水上驱动装置、电源13和控制装置,所述箱体为上部敞口且其内部具有一容纳腔体,所述敞口通过一对舱门2进行开启和关闭;所述停机平台3通过一升降装置设置在所述容纳腔体内,所述停机平台3通过所述升降装置的伸长使所述停机平台3可伸出所述敞口,所述停机平台3通过所述升降装置的收缩使所述停机平台3收缩进所述容纳腔体;所述吃排水装置5设置在所述箱体内;所述吃排水装置5包括水泵10、压载水箱和高压气箱,所述压载水箱对应连接所述水泵10与所述高压气箱,所述压载水箱通过所述水泵10的抽水动作使所述箱体1下沉,所述压载水箱通过所述高压气箱的充气动作使所述箱体1上浮;水上驱动装置用于驱动所述箱体在水中发生位移;所述电源13设置在所述箱体内,用于对飞行至所述容纳腔体内的所述无人机4进行充电;所述控制装置对应与所述升降装置、所述吃排水装置5、所述水上驱动装置和所述电源13连接;所述控制装置包括通信组件11、探测和数据存储组件12和控制组件;所述通信组件11设置在所述箱体内,用于与所述无人机4和远程终端发生信息交互,获取无人机拍摄的遥感图像并存储于箱体内的存储装置上;所述探测和数据存储组件12设置在所述箱体内,用于检测所述无人机4的位
置,并将所述位置的坐标信息发送至所述控制组件;所述控制组件设置在所述箱体内,用于接收所述位置的坐标信息,并依据所述位置的坐标信息控制所述箱体移动至该所述位置处,以及所述控制组件还用于控制所述吃排水装置5动作使所述箱体1下沉或上浮;其中,所述探测和数据存储组件12通过所述通信组件11接收所述无人机4的所述坐标信息;所述控制组件依据所述坐标信息控制所述水上驱动装置,以驱动所述箱体1移动至所述位置处;所述控制组件依据所述坐标信息控制所述吃排水装置5动作使所述箱体1上浮至水面,以接收所述无人机4飞行至所述容纳腔体中;以及所述箱体1上浮至水面接收所述无人机4后,所述控制组件控制所述吃排水装置5动作使所述箱体1下沉至水下。
24.在上述实施例一的技术方案中,通过在箱体内设置一容纳腔体,并在容纳腔体内设置有电源13、吃排水装置5、水上驱动装置和控制装置,当无人机4在水上飞行需要充电时,可向设置在箱体1内的控制装置发送充电请求指令,当控制装置接收到请求指令后,即可控制检测无人机4的位置坐标信息,并依据位置坐标信息控制箱体1向位置坐标处移动,其中,控制箱体1向位置坐标处移动具体包括:先控制吃排水装置5的水泵10向压载水箱内抽水,使得箱体1的重量增加并下沉至水中,然后在控制水上驱动装置驱动箱体1朝向无人机4的位置坐标移动,使得无人机4在原飞行的位置即可就近降落至箱体1进行自动充电以及临时保存,而不需要重新返回特定的固定充电站点通过人工进行充电,以增加飞行成本和人工成本。
25.需要说明的是,上述实施例一中远程终端可以包括:pc控制端、工控台、移动控制端等集成控制端口,该集成控制端口通过通信组件与本发明实施例一中的控制组件相连接。
26.进一步地,对于吃排水装置5而言,本实施例一还包括导管9,通过该导管9将水泵10与压载水箱相连通,当水泵10抽水时,水通过导管9被抽入至压载水箱内,且在压载水箱的侧壁还设置有排水孔8,当需要使箱体1上浮时,通过高压气箱的充气动作,即向压载水箱内充气使压载水箱内的水通过该排水孔8流出,进而减轻箱体1的重量,使其上浮。
27.具体来说,对于上述实施例一中开关门的安装方式而言,其可以包括如下实施方式实现,该实施方式具体为:在敞口的一对相对立的棱边对应设置有一对导轨,一对舱门2对应设置在导轨上,并可沿导轨进行滑动,当舱门2需要打开或者关闭时,一对舱门2沿导轨相互靠近或者相互远离进行滑动,以实现 舱门2的开合;同时,一对舱门2还可对应通过一对驱动装置进行驱动滑动,以实现自动开合的技术效果,舱门2的外表面安装太阳能板,对上述系统的各用电装置供电和充电。
28.进一步地,一对舱门2关闭后使得容纳腔体形成密封的空间。
29.基于上述实施例一中的停机平台3,对于停机平台3的结构而言,其可以包括如下的实施方式,该实施方式包括:停机平台3包括一底座和围绕底座的上边缘周向设置的筒状护套,底座与护套整体呈碗状,底座远离护套的一面与升降装置连接,当升降装置执行伸长动作或者收缩动作时,对应带动底座上升或者下降,其中,当无人机4位于停机平台3内时,停机平台3的护套高度高于无人机4的高度,这样就使得无人机4在充电时被护套保护在内,防止充电过程中风浪对无人机4的本体造成冲击。
30.基于上述实施例一中水上驱动装置而言,其可以包括,驱动电机6和螺旋桨7,该驱动电机6设置在箱体内,避免与水接触,驱动电机6的驱动轴穿设处箱体的侧壁位于箱体的
外部与螺旋桨7驱动连接,当需要使箱体1发生位置移动时,可通过驱动电机6驱动该螺旋桨7进行转动,进而推动该箱体1朝着推力的方向发生位置移动。
31.具体来说,对于箱体1而言,其还包括密封壳体,其设置在箱体内部,用于将电源13、控制装置和驱动电机6密封在内,防止当舱门2打开时水或者异物进入密封腔体内部对电源13、控制装置和驱动电机6造成间接或者直接损伤。
32.具体来说,对于探测和数据存储组件12而言,本实施例一提出一种实施方式,该实施方式包括:激光雷达、传感器以及摄像头,激光雷达用于检测无人机4的位置,传感器用于当激光雷达获取到无人机4的位置信息后进行信息交互传递,摄像头用于获取无人机4或者机巢所处的周边环境的图像信息。
33.实施例二:本技术实施例二提供了用于无人机充电、遥感图像采集和存储的方法,在介绍本技术提供的用于无人机充电、遥感图像采集和存储方法之前,首先介绍本技术所涉及的背景内容。
34.本技术提供的用于无人机充电、遥感图像采集和存储的方法,可应用于实施例一的用于无人机充电、遥感图像采集和存储的系统,用于提供一种新的控制方法,达到通过对无人机进行充电、遥感信息采集的技术效果。具体而言,该方法的执行主体可以为无人机,或者为实施例一中所述的无人机的控制装置,或者是集成了该控制方法用于来控制无人机的遥控器、地面站或者客户端。容易理解,客户端,对应用户侧,具体为物理主机或者用户设备(user equipment,ue)等类型的设备,其中,ue具体可以为智能手机、平板电脑、笔记本电脑、台式电脑或者个人数字助理(personal digital assistant,pda)等终端设备。其中,实施例一中所述的无人机的控制装置可以采用硬件或者软件的方式实现。
35.下面,开始介绍本技术提供的方法:本实施例二提供了用于无人机充电、遥感图像采集和存储的方法,用于对无人机4飞行监测充电的系统1进行控制,所述系统包括:箱体1、停机平台3、吃排水装置5、水上驱动装置、电源13和控制装置,所述箱体为上部敞口且其内部具有一容纳腔体,所述敞口通过一对舱门2进行开启和关闭;所述停机平台3通过一升降装置设置在所述容纳腔体内,所述停机平台3通过所述升降装置的伸长使所述停机平台3可伸出所述敞口,所述停机平台3通过所述升降装置的收缩使所述停机平台3收缩进所述容纳腔体;所述吃排水装置5设置在所述箱体内;所述吃排水装置5包括水泵10、压载水箱和高压气箱,所述压载水箱对应连接所述水泵10与所述高压气箱,所述压载水箱通过所述水泵10的抽水动作使所述箱体1下沉,所述压载水箱通过所述高压气箱的充气动作使所述箱体1上浮;所述水上驱动装置用于驱动所述箱体在水中发生位移;所述电源13设置在所述箱体内,用于对飞行至所述容纳腔体内的所述无人机4进行充电;所述控制装置对应与所述升降装置、所述吃排水装置5、所述水上驱动装置和所述电源13连接;所述控制装置包括通信组件11、探测和数据存储组件12和控制组件;所述通信组件11设置在所述箱体内,用于与所述无人机4发生信息交互;所述探测和数据存储组件12设置在所述箱体内,用于检测所述无人机4的位置和转存无人机采集的遥感图像数据,并将所述位置的坐标信息发送至所述控制组件;所述控制组件设置在所述箱体内,用于接收所述位置的坐标信息,并依据所述位置的坐标信息控制所述箱体移动至该所述位置处,以及所述控制组件还用于控制所述吃排水装置5产生排水或吸水动作从而控
制整个设备的浮力大小,使所述箱体1下沉或上浮;所述方法包括:用于无人机充电、遥感图像采集和存储的箱体进行控制,所述控制方法包括:获取无人机的当前电量信息;依据所述当前电量信息判断所述无人机是否需要充电;若是,则获取无人机的当前坐标信息;所述获取无人机的坐标信息包括:控制探测和数据存储组件通过通信组件接收所述无人机的所述当前坐标信息;依据所述当前坐标信息控制水上驱动装置,以驱动所述箱体移动至所述当前坐标信息所对应的水面坐标位置处;依据所述水面坐标信息控制吃排水装置动作使所述箱体上浮至水面,以接收所述无人机飞行至箱体中;其中,当所述箱体上浮至水面接收所述无人机后,控制所述吃排水装置动作使所述箱体下沉至水下。
36.在上述实施二的技术方案中,先获取无人机的当前电量信息,若需要充电则获取无人机4的当前坐标信息,然后依据当前坐标信息控制水上驱动装置驱动箱体1移动至当前坐标信息所对应的水面坐标位置处,需要说明的是,当前坐标信息指的是箱体所在的水面位置,与当前坐标信息对应的水面坐标指的是无人机的位置,也即处于箱体上方预设范围内的空间位置,然后在控制吃排水装置5进行排水动作使箱体1上浮至水面,以接收无人机4至容纳腔体内进行充电。在接收到无人机4后,控制舱门关闭,然后控制吃排水装置5进行吸水动作,降低箱体的浮力使得整个设备下沉至水下,以对无人机4进行临时保存。
37.具体而言,对于上述实施例二中开关门的安装方式而言,其可以包括如下实施方式实现,该实施方式具体为:在敞口的一对相对立的棱边对应设置有一对导轨,且将一对舱门2对应设置在导轨上,使一对舱门2可对应沿导轨进行滑动,当舱门2需要打开或者关闭时,使一对舱门2沿导轨相互靠近或者相互远离进行滑动,以实现舱门2的开合;同时,一对舱门2还可对应通过一对驱动装置进行驱动滑动,以实现自动开合的技术效果。
38.基于上述实施例二中的控制方法来说,对于停机平台3的设置方式而言,其可以包括如下的实施方式,该实施方式包括:将停机平台3设置为一底座和围绕底座的上边缘周向设置的筒状护套,底座与护套整体呈碗状,底座远离护套的一面与升降装置连接,当升降装置执行伸长动作或者收缩动作时,对应带动底座上升或者下降,其中,当无人机4位于停机平台3内时,停机平台3的护套高度高于无人机4的高度,这样就使得无人机4在充电时被护套保护在内,防止充电过程中风浪对无人机4的本体造成冲击。
39.对于上述实施例二中的控制方法来说,其还包括如下实施方式:将水上驱动装置配置为驱动电机6和螺旋桨7,并将驱动电机6设置在箱体内,以防止驱动电机6与水接触;以及将驱动电机6的驱动轴穿设出箱体的侧壁位于箱体的外部,并与螺旋桨7驱动连接,当需要使箱体1发生位置移动时,可通过驱动电机6驱动该螺旋桨7进行转动,进而推动该箱体1朝着推力的方向发生位置移动。
40.具体而言,在上述实施例中获取无人机的当前电量信息的步骤之前,本实施例二还提出一种实施方式,该实施方式包括:先通过控制组件接收无人机发送的请求指令;该请求指令用于表示无人机的充电请求指令;然后依据请求指令获取无人机的型号,以判断无人机的型号是否为预设数据库内的目标无人机型号;若是,则判断无人机为需要充电的目标无人机;若否,则判断无人机为待定无人机,并将待定无人机的型号通过通信组件发送至远程终端;最后,接收远程终端发送的指令信息;指令信息是远程终端依据待定无人机的型号判断待定无人机是否为可进行充电的信息;若是,将可进行充电的待定无人机的型号更新至预设数据库中,作为本实施例二中对待定无人机进行充电的一种应用场景,本实施例
二提出一种实施方式,该方式包括:可以在无人机的适飞范围内设置多个用于无人机充电、遥感图像采集和存储的系统,当其中一个待定无人机在某一用于无人机充电、遥感图像采集和存储的系统无法进行型号匹配时,可以向该某一用于无人机充电、遥感图像采集和存储的系统预设半径1
‑
3公里以内的其他用于无人机充电、遥感图像采集和存储的系统发送指令信息,使得该其中一个待定无人机重新与该某一用于无人机充电、遥感图像采集和存储的系统预设半径内的其他用于无人机充电、遥感图像采集和存储的系统进行匹配,直至匹配成功并进行充电。
41.进一步地,若指令信息是远程终端依据待定无人机的型号判断待定无人机不是可进行充电的信息;则将待定无人机的请求指令和待定无人机的型号发送至预设范围内的其他用于无人机充电、遥感图像采集和存储的系统,这样就使得,能够通过预设范围内的其他用于无人机充电、遥感图像采集和存储的系统与该待定无人机的型号进行重新匹配,以解决该待定无人机的充电问题。作为本实施例二中对待定无人机进行充电的一种应用场景,本实施例二提出一种实施方式,该方式包括:可以在无人机的适飞范围内设置多个用于无人机充电、遥感图像采集和存储的系统,当其中一个待定无人机在某一用于无人机充电、遥感图像采集和存储的系统无法进行型号匹配时,可以向该某一用于无人机充电、遥感图像采集和存储的系统预设半径1
‑
3公里以内的其他用于无人机充电、遥感图像采集和存储的系统发送指令信息,使得该其中一个待定无人机重新与该某一用于无人机充电、遥感图像采集和存储的系统预设半径内的其他用于无人机充电、遥感图像采集和存储的系统进行匹配,直至匹配成功并进行充电。
42.在进一步地,当目标无人机为多架时,通过上述实施例中的获取无人机的当前电量信息,依据当前电量信息判断无人机是否需要充电的方法,本实施例二提出一种具体实施方式,该实施方式包括:获取多架所述目标无人机的当前电量信息;依据当前电量信息对目标无人机的充电顺序进行优先级排序,优先级排序是按照电量从小到大进行排序;对多架目标无人机按照优先级排序依次进行充电,例如同时获取到三架无人机的电量信息,则依据上述三架无人机的电量进行排序,例如1号无人机的电量显示为百分之十五、2号无人机的电量心事为百分之十、3号无人机的电量显示为百分之二十,则对上述三架无人机的优先级排序为2号无人机、1号无人机和3号无人机,并按上述排序依次对2号无人机、1号无人机以及3号无人机进行充电。
43.最后所应说明的是,尽管已描述了本发明的优选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例作出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本发明范围的所有变更和修改。显然,本领域的技术人员可以对本发明实施例进行各种改动和变型而不脱离本发明实施例的精神和范围。这样,倘若本发明实施例的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。