1.本发明属于水上救援设备领域,特别是涉及一种水上智能救援机器人及其使用方法。
背景技术:
2.目前,在不明海域搜救落水者的工作过程中,传统的救援方式主要依靠救员人员携带救生器具靠近落水者,由于施救过程速度慢、难度大,同时救员人员也存在一定的危险性,因此,通常需要借助水上智能救援机器人来代替救生员进行施救工作,水下机器人也称无人遥控潜水器,是一种工作于水下的极限作业机器人。水下环境恶劣危险,人的潜水深度有限,所以水下机器人已成为开发海洋的重要工具,典型的遥控潜水器是由水面设备(包括操纵控制台、电缆绞车、吊放设备、供电系统等)和水下设备(包括中继器和潜水器本体)组成。
3.经检索,申请号cn201921276614.7,该实用新型涉及一种水上智能救援机器人,其技术方案要点是包括船身和船盖,所述船盖密封盖合在船身上,所述船身的两侧对称设置有救生围栏,所述救生围栏的一端可拆卸的固定安装在船身上,救生围栏的另一端朝向船尾弯折。本实用新型的优点是能够安全的将落水者缓慢送至岸边,同时在黄金抢救时间内发现并救助更多的落水者。
4.但是在恶略天气环境下,部分落水者长时间处在水里,筋疲力尽,身体较为虚弱,甚至溺水昏迷,不能够攀爬到机器人上,从而还需要救援人员驾驶另外一艘机器人抵达落水者,救援人员跳入水中需要一定的时间去搜寻落水者的准确位置,才可对落水者实施救助,因此降低了救援速度,延长了救援时间,导致救援人员没有多余的精力在黄金抢救时间内去发现更多的落水人员。
技术实现要素:
5.本发明的目的在于提供一种水上智能救援机器人,通过水面操纵控制台控制潜水器本体快速准确移动到落水者的身旁,启动第三电动液压缸带动机械爪对落水人员胳膊或腿部进行夹持固定,机械爪上可设置保护垫,避免夹伤落水人员;控制气瓶迅速向气囊中放气,充满气体的气囊在浮力作用下,拉动整个装置连同落水人员快速浮起,便于水面救援人员及时进行救援,提高救援速度。
6.为解决上述技术问题,本发明是通过以下技术方案实现的:
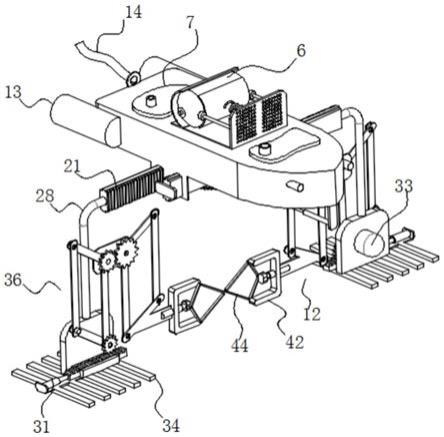
7.本发明为一种水上智能救援机器人,包括潜水器本体;所述潜水器本体表面依次固定连接有第一曲面夹板和安装板;所述安装板表面对称固定连接有滑杆;两所述滑杆上滑动配合有一第二曲面夹板;所述第一曲面夹板与第二曲面夹板之间夹持配合有气瓶;所述潜水器本体表面还对称设置有气囊;
8.所述潜水器本体底部设有可转动的转动组件;所述潜水器本体底面固定连接有第一电动液压缸;所述第一电动液压缸一端固定连接有第一齿轮条;所述转动组件与第一齿
轮条啮合配合;
9.所述潜水器本体两侧面对称滑动配合有安装架;所述安装架与转动组件啮合配合;所述安装架啮合配合有机械手。
10.进一步地,所述潜水器本体两侧面对称设置有推进器;所述潜水器本体尾部设置有线缆;所述潜水器本体头部对称设置有探照灯。
11.进一步地,所述安装板侧面开有若干漏水孔;所述第二曲面夹板与安装板之间固定连接有挤压弹簧;所述气囊与气瓶通过通气软管固定连接。
12.进一步地,所述潜水器本体侧面对称固定连接有支撑板;所述支撑板侧面对称开有滑动槽道;所述滑动槽道内圈侧壁上对称开有限位槽道;所述安装架包括第二齿轮条;所述第二齿轮条两侧面对称设置有滑轨;所述滑轨与限位槽道滑动配合。
13.进一步地,所述潜水器本体底部设置有转动套筒;所述转动组件包括连接轴;所述连接轴与转动套筒转动配合;所述连接轴周侧面从上往下依次设置有第一转动齿轮和第二转动齿轮;所述第一转动齿轮分别与两第二齿轮条啮合配合;所述潜水器本体底部设置有第一c形连接板;所述第一齿轮条与第一c形连接板滑动配合;所述第二转动齿轮与第一齿轮条啮合配合。
14.进一步地,所述第二齿轮条一端固定连接有连接杆;所述连接杆一端固定连接有装配板;所述装配板侧面固定连接有第二c形连接板;所述第二c形连接板侧面固定连接有第二电动液压缸;所述第二电动液压缸的伸缩端固定连接有第三齿轮条;所述第三齿轮条与第二c形连接板滑动配合;所述装配板侧面设置有摄像头;所述第二c形连接板底部呈线性阵列分布设置有浮板。
15.进一步地,所述装配板侧面设置有转动杆;所述转动杆与机械手转动配合;所述机械手包括伸缩框和连接板;两所述伸缩框分别与连接板转动配合;所述伸缩框包括第一转动板和第二转动板;所述第一转动板与第二转动板依次首尾相连,且相互转动配合。
16.进一步地,一所述伸缩框上的一第一转动板两端固定连接有第三转动齿轮;另一所述伸缩框上的一第二转动板一端固定连接有第四转动齿轮;所述第三转动齿轮与第四转动齿轮啮合配合;一所述第三转动齿轮与第三齿轮条啮合配合。
17.进一步地,一所述伸缩框上的第二转动板侧面固定连接有c形安装板;所述c形安装板内侧面贯穿设置有第三电动液压缸;所述第三电动液压缸伸缩端设置有机械爪。
18.一种水上智能救援机器人的使用方法,包括以下步骤:
19.ss01通过探照灯以及摄像头的探查,便于救援人员快速找到水中的被困人员,通过线缆控制推进器向潜水器本体提供动力和交换信息,控制潜水器本体迅速到达指定救援位置;
20.ss02通过启动第一电动液压缸带动第一齿轮条沿着第一c形连接板移动,带动第二转动齿轮的转动,从而带动第一转动齿轮的转动,使得两第二齿轮条同步反向移动,实现对安装架的展开;
21.ss03启动第二电动液压缸带动第三齿轮条沿着第二c形连接板移动,带动第三转动齿轮的转动,从而带动一伸缩框的伸缩变形,通过第三转动齿轮与第四转动齿轮的啮合配合,带动另一伸缩框同步伸缩变形,使得机械手展开;
22.ss04启动第三电动液压缸带动机械爪对落水人员胳膊或腿部进行夹持固定;
23.ss05控制气瓶迅速向气囊中充气,充满气体的气囊在浮力作用下,拉动整个装置连同落水人员快速浮起,便于水面救援人员及时进行救援。
24.本发明具有以下有益效果:
25.1、本发明通过水面操纵控制台控制潜水器本体快速准确移动到落水者的身旁,启动第三电动液压缸带动机械爪对落水人员胳膊或腿部进行夹持固定,机械爪上可设置保护垫,避免夹伤落水人员;控制气瓶迅速向气囊中放气,充满气体的气囊在浮力作用下,拉动整个装置连同落水人员快速浮起,便于水面救援人员及时进行救援,提高了救援速度,缩短救援时间。
26.2、本发明通过启动第一电动液压缸带动第一齿轮条移动,从而带动两第二齿轮条同步反向移动,实现对安装架的展开或收缩,通过启动第二电动液压缸带动第二c形连接板的移动,带动伸缩框的伸缩展开,实现对机械手的展开或收缩;实现在搜救过程中减小安装架和机械手的占地面积,便于灵活移动且减小装置在水中移动受到的阻力,提高救援速度。
27.当然,实施本发明的任一产品并不一定需要同时达到以上所述的所有优点。
附图说明
28.为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
29.图1为本发明一种水上智能救援机器人的结构示意图;
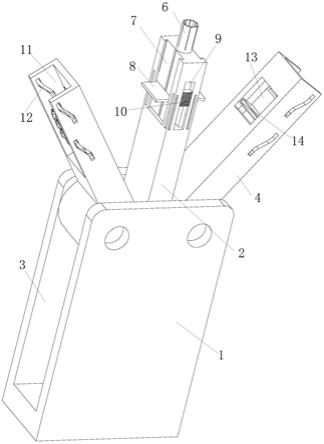
30.图2为本发明潜水器本体的结构示意图;
31.图3为本发明潜水器本体仰视视角的结构示意图;
32.图4为本发明转动组件的结构示意图;
33.图5为本发明安装架的结构示意图;
34.图6为本发明安装架与机械手装配体的结构示意图。
35.附图中,各标号所代表的部件列表如下:
[0036]1‑
潜水器本体,2
‑
第一曲面夹板,3
‑
安装板,4
‑
滑杆,5
‑
第二曲面夹板,6
‑
气瓶,7
‑
气囊,8
‑
转动组件,9
‑
第一电动液压缸,10
‑
第一齿轮条,11
‑
安装架,12
‑
机械手,13
‑
推进器,14
‑
线缆,15
‑
探照灯,16
‑
漏水孔,17
‑
挤压弹簧,18
‑
支撑板,19
‑
滑动槽道,20
‑
限位槽道,21
‑
第二齿轮条,22
‑
滑轨,23
‑
转动套筒,24
‑
连接轴,25
‑
第一转动齿轮,26
‑
第二转动齿轮,27
‑
第一c形连接板,28
‑
连接杆,29
‑
装配板,30
‑
第二c形连接板,31
‑
第二电动液压缸,32
‑
第三齿轮条,33
‑
摄像头,34
‑
浮板,35
‑
转动杆,36
‑
伸缩框,37
‑
连接板,38
‑
第一转动板,39
‑
第二转动板,40
‑
第三转动齿轮,41
‑
第四转动齿轮,42
‑
c形安装板,43
‑
第三电动液压缸,44
‑
机械爪。
具体实施方式
[0037]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它
实施例,都属于本发明保护的范围。
[0038]
请参阅图1
‑
6所示,本发明为一种水上智能救援机器人,包括潜水器本体1;潜水器本体1表面依次固定连接有第一曲面夹板2和安装板3;安装板3表面对称固定连接有滑杆4;两滑杆4上滑动配合有一第二曲面夹板5;第一曲面夹板2与第二曲面夹板5之间夹持配合有气瓶6;潜水器本体1表面还对称设置有气囊7;潜水器本体1两侧面对称滑动配合有安装架11;安装架11与转动组件8啮合配合;安装架11啮合配合有机械手12;通过各部件之间的配合,使得安装架11和机械手12能够进行伸缩展开,减小移动过程中整个装置的受力面积,便于灵活移动,且减小阻力。
[0039]
其中,潜水器本体1两侧面对称设置有推进器13;潜水器本体1尾部设置有线缆14;潜水器本体1头部对称设置有探照灯15;通过探照灯15以及摄像头33便于潜水器本体1及时且迅速找到落水者。
[0040]
其中,安装板3侧面开有若干漏水孔16;第二曲面夹板5与安装板3之间固定连接有挤压弹簧17;气囊7与气瓶6通过通气软管固定连接;通过控制气瓶6上的控制阀控制气瓶6向气囊7中快速充气,充满气的气囊7在浮力作用下将整个装置连同落水者拉回水面,便于救援人员及时施救。
[0041]
其中,潜水器本体1侧面对称固定连接有支撑板18;支撑板18侧面对称开有滑动槽道19;滑动槽道19内圈侧壁上对称开有限位槽道20;安装架11包括第二齿轮条21;第二齿轮条21两侧面对称设置有滑轨22;滑轨22与限位槽道20滑动配合;潜水器本体1底部设有可转动的转动组件8;潜水器本体1底面固定连接有第一电动液压缸9;第一电动液压缸9一端固定连接有第一齿轮条10;转动组件8与第一齿轮条10啮合配合;潜水器本体1底部设置有转动套筒23;转动组件8包括连接轴24;连接轴24与转动套筒23转动配合;连接轴24周侧面从上往下依次设置有第一转动齿轮25和第二转动齿轮26;第一转动齿轮25分别与两第二齿轮条21啮合配合;潜水器本体1底部设置有第一c形连接板27;第一齿轮条10与第一c形连接板27滑动配合;第二转动齿轮26与第一齿轮条10啮合配合;通过启动第一电动液压缸9带动第一齿轮条10在第一c形连接板27内部移动,带动第二转动齿轮26的转动,从而带动第一转动齿轮25的转动,实现两第二齿轮条21沿着滑动槽道19同步反向移动,实现两安装架11的伸缩展开。
[0042]
其中,第二齿轮条21一端固定连接有连接杆28;连接杆28一端固定连接有装配板29;装配板29侧面固定连接有第二c形连接板30;第二c形连接板30侧面固定连接有第二电动液压缸31;第二电动液压缸31的伸缩端固定连接有第三齿轮条32;第三齿轮条32与第二c形连接板30滑动配合;装配板29侧面设置有摄像头33;第二c形连接板30底部呈线性阵列分布设置有浮板34;通过浮板34的设置,提高了装个装置在水中悬停的稳定性。
[0043]
装配板29侧面设置有转动杆35;转动杆35与机械手12转动配合;机械手12包括伸缩框36和连接板37;两伸缩框36分别与连接板37转动配合;伸缩框36包括第一转动板38和第二转动板39;第一转动板38与第二转动板39依次首尾相连,且相互转动配合;一伸缩框36上的一第一转动板38两端固定连接有第三转动齿轮40;另一伸缩框36上的一第二转动板39一端固定连接有第四转动齿轮41;第三转动齿轮40与第四转动齿轮41啮合配合;一第三转动齿轮40与第三齿轮条32啮合配合;通过启动第二电动液压缸31带动第三齿轮条32沿着第二c形连接板30移动,带动一第三转动齿轮40的转动,且通过第三转动齿轮40与第四转动齿
轮41啮合配合,从而带动两伸缩框36进行伸缩展开。
[0044]
其中,一伸缩框36上的第二转动板39侧面固定连接有c形安装板42;c形安装板42内侧面贯穿设置有第三电动液压缸43;第三电动液压缸43伸缩端设置有机械爪44;通过启动第三电动液压缸43带动机械爪44对落水者的胳膊或腿部进行抓取固定,在机械爪44上可设置防护垫或气囊,防止夹伤落水者。
[0045]
本发明的一种水上智能救援机器人的使用方法,包括以下步骤:
[0046]
ss01通过探照灯15以及摄像头33的探查,便于救援人员快速找到水中的被困人员,通过线缆14控制推进器13向潜水器本体1提供动力和交换信息,控制潜水器本体1迅速到达指定救援位置;
[0047]
ss02通过启动第一电动液压缸9带动第一齿轮条10沿着第一c形连接板27移动,带动第二转动齿轮26的转动,从而带动第一转动齿轮25的转动,使得两第二齿轮条21同步反向移动,实现对安装架11的展开,浮板34的设置,提高悬停的潜水器本体1稳定性;
[0048]
ss03启动第二电动液压缸31带动第三齿轮条32沿着第二c形连接板30移动,带动第三转动齿轮40的转动,从而带动一伸缩框36的伸缩变形,通过第三转动齿轮40与第四转动齿轮41的啮合配合,带动另一伸缩框36同步伸缩变形,使得机械手12展开;
[0049]
ss04启动第三电动液压缸43带动机械爪44对落水人员胳膊或腿部进行夹持固定,机械爪44上可设置保护棉层,避免夹伤落水人员;
[0050]
ss05控制气瓶迅速向气囊7中充气,充满气体的气囊7在浮力作用下,拉动整个装置连同落水人员快速浮起,便于水面救援人员及时进行救援。
[0051]
在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
[0052]
以上公开的本发明优选实施例只是用于帮助阐述本发明。优选实施例并没有详尽叙述所有的细节,也不限制该发明仅为所述的具体实施方式。显然,根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本发明的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本发明。本发明仅受权利要求书及其全部范围和等效物的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。