1.本发明涉及柔性机械臂,特别是涉及一种基于建模的方式预测柔性机械臂的动力学输出的方法。
背景技术:
2.绳驱柔性机械臂具有纤细的本体和超冗余的自由度,适合在狭小非结构化环境使用,在医疗外科手术、空间飞行器检查与维修、灾害救援等领域展现了重要的应用前景。cn108942906b中,研究者团队提出的一种绳驱联动式柔性机械臂,相对于传统柔性机械臂,具有承载刚度大、运动精度高、所需驱动电机数量少的优点,综合性能优越。传统关于柔性机械臂建模的研究,多数是基于运动学或静力学的建模,无法分析摩擦和绳索变形等因素对柔性机械臂运动精度的动态影响。已有少数关于动力学建模的研究,也没有全面考虑上述因素对机械臂动力学特性的影响。柔性机械臂在实际工作时,上述因素是无法回避和忽视的,它们会使机械臂实际运动轨迹与规划轨迹存在较大的偏移。
3.现有动力学的建模方法往往着重点在于多刚体系统的建模上,而轻视对绳索系统的建模。如图1所示,现有研究往往将柔性机械臂看作是一个链式多刚体系统,认为基座是力模式的控制输入,利用张力衰减公式计算绳索对各过孔的作用力,然后建立多刚体系统动力学方程,并进行求解。其缺点包括:1.不能全面分析绳索摩擦和弹性变形等因素对柔性机械臂运动精度的影响;2.只能研究力模式的控制输入,不能研究绳长模式的输入,而在柔性机械臂实际系统中,采用更广泛的是绳长模式的输入。
4.需要说明的是,在上述背景技术部分公开的信息仅用于对本技术的背景的理解,因此可以包括不构成对本领域普通技术人员已知的现有技术的信息。
技术实现要素:
5.本发明的主要目的在于克服上述背景技术的缺陷,提供一种基于建模的方式预测柔性机械臂的动力学输出的方法。
6.为实现上述目的,本发明采用以下技术方案:
7.一种基于建模的方式预测柔性机械臂的动力学输出的方法,所述柔性机械臂包括通过关节依次相连的若干刚性臂杆,所述若干刚性臂杆被分为若干联动段,每个联动段由驱动绳索驱动,而联动段中的各关节在联动绳索的约束下同步转动,所述方法包括:
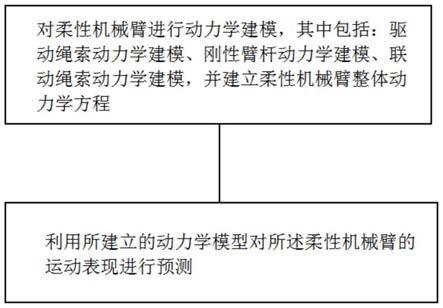
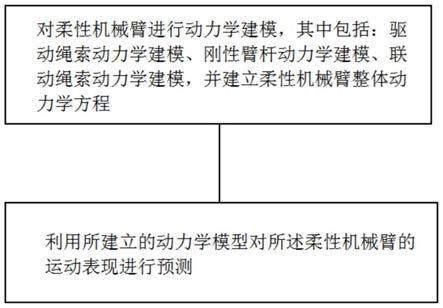
8.对所述柔性机械臂进行动力学建模,其中包括:驱动绳索动力学建模、刚性臂杆动力学建模、联动绳索动力学建模,并建立柔性机械臂整体动力学方程;
9.以及利用所建立的动力学模型对所述柔性机械臂的运动表现进行预测。
10.进一步地:
11.所述驱动绳索动力学建模包括:
12.采用任意拉格朗日
‑
欧拉ale方法对驱动绳索进行建模;一个ale绳索单元的广义坐标表示为
[0013][0014]
其中r
k
(k=1,2)为节点k的位置坐标,而s
k
为物质坐标;通过引入一定约束,节点退化为拉格朗日节点或欧拉节点;如引入约束s
k
‑
s0=0,则对应为拉格朗日节点;如引入约束r
k
‑
r0=0,则对应为欧拉节点;ale绳索单元的动力学方程表示为
[0015][0016]
其中m
ele
为索单元的广义质量矩阵,q
f
为包含摩擦力等外力的广义力,q
e
为绳索弹性力的广义力,q
p
为物质坐标变化引入的附加惯性力的广义力;
[0017]
过孔处看作是一个欧拉节点,即有如下约束方程:
[0018]
r
i
‑
r
hole,i
=0
ꢀꢀ
(37)
[0019]
采用库伦干摩擦模型建模描述绳索与过孔接触点的黏滞
‑
滑移运动;对于点接触的摩擦问题,摩擦力表示为
[0020][0021]
其中f和n分别为摩擦力和正压力,μ和μ
′
分别为动静摩擦系数,f
τ
为沿切向方向的作用力之和,v
τ
为接触点相对切向速度;通过积分得到作用于绳索与过孔接触区域的摩擦力如下:
[0022][0023]
其中f
t
为绳索在过孔处所受摩擦力的总和,θ为过孔处的绳索包角,f
max
为最大静摩擦力,表示如下:
[0024]
f
max
=min(t1,t2)
·
(e
μ
′
θ
‑
1)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(40)
[0025]
上述摩擦力的广义力表示为
[0026]
q
friction
=[01×3,f
t
]
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(41)。
[0027]
所述刚性臂杆动力学建模包括:
[0028]
分别建立惯性坐标性和随体坐标系,则臂杆i的广义坐标表示为
[0029][0030]
其中q
ci
=[x
i
,y
i
,z
i
]
t
为臂杆i的质心坐标,q
ei
=[e
0i
,e
1i
,e
2i
,e
3i
]
t
为四元数向量;臂杆i相对于臂杆i
‑
1的旋转矩阵表示为
[0031][0032]
其中r
i
和r
i
‑1分别为相应臂杆的旋转矩阵,i/(i
‑
1)表示i相对于i
‑
1;因此,臂杆i与臂杆i
‑
1的相对转角为
[0033]
θ
i/(i
‑
1)
=f
r
‑
θ
(r
i/(i
‑
1)
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(44)
[0034]
函数f
r
‑
θ
与欧拉旋转顺序有关;臂杆i的角速度在其随体坐标系的表示为
[0035][0036]
臂杆i相对于臂杆i
‑
1的角速度在臂杆i随体坐标系下的表示为
[0037]
ω
i/(i
‑
1)
=ω
′
i
‑
r
i/(i
‑
1)
ω
′
i
‑1ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(46)
[0038]
根据欧拉运动学公式,有
[0039][0040]
其中b
i/(i
‑
1)
与欧拉旋转顺序和相对转角θ
i/(i
‑
1)
有关;上式取逆得
[0041][0042]
自由臂杆i的动力学方程表示为
[0043][0044]
其中m
i
为臂杆i的质量矩阵,q
i
为广义力向量,为动能对广义坐标的偏导数;广义力向量由下式确定:
[0045][0046]
其中f
i
和m
′
分别为作用在臂杆i上的力和力偶,包括重力、联动绳索作用力偶。
[0047]
所述联动绳索动力学建模包括:
[0048]
通过联动绳索相连的两个相邻关节i和j,采用修正的库伦摩擦模型对绳索与导管的摩擦力进行建模,则联动绳索两端的张力表示为
[0049][0050]
并且
[0051][0052]
其中l
lc
为联动绳索长度,θ
lc
为联动绳索的空间包角,v
τ1
和v
τ2
为两根联动绳索相对于导管的切向速度,δl1和δl2为两根联动绳索的伸长量,μ
m
为修正的库伦摩擦系数;绳索的伸长量由下式确定:
[0053][0054]
其中t
p
为联动绳索预紧力,r
lc
为滑轮半径,e
c
和a
c
分别为联动绳索的杨氏模量和横截面积;因此,这一对联动绳索作用在关节i的联动力偶为
[0055][0056]
其中
[0057][0058]
k
lci
称为联动刚度系数,而c
lci
为联动阻尼系数;同样,作用在关节j的联动力偶为
[0059][0060]
其中
[0061][0062]
每个关节都受到前后两个关节联动绳索的综合作用,作用在关节i的联动力偶表示为
[0063][0064]
其中矩阵k
c
和c
c
由联动刚度系数和联动阻尼系数组成;上述联动力偶作用在臂杆i和i
‑
1上的广义力分别为
[0065][0066]
所述并建立柔性机械臂整体动力学方程包括:
[0067]
柔性机械臂系统的广义坐标表示为
[0068][0069]
其中m和n分别表示驱动绳索的节点数和刚性臂杆数;通过组装所有的质量矩阵、广义力向量和约束向量,系统整体的动力学方程表示为
[0070][0071]
其中m为广义质量矩阵,q为包含重力、弹性力、科氏力、联动力偶等在内的广义力向量,φ为包含关节约束、欧拉或拉格朗日节点约束、非定常绳长输入等运动学约束的向量,φ
q
为雅克比矩阵,λ为拉格朗日乘子向量;引入鲍姆加特稳定化方法抑制求解过程的约束漂移问题:
[0072][0073]
其中α
b
和β
b
为正常数;上式等价为
[0074][0075]
其中
[0076][0077]
联立(27)和(29)两式得
[0078][0079]
将上式代入到式(29),则得到系统的拉格朗日乘子向量如下:
[0080][0081]
其中
[0082][0083]
再将式(32)代入式(31),得到常微分方程形式的柔性机械臂动力学如下:
[0084][0085]
所述驱动绳索为三根驱动绳索,所述联动绳索为两根联动绳索。
[0086]
一种计算机可读存储介质,存储有计算机程序,所述计算机程序由处理器执行时,实现如权利要求1至6任一项所述的方法。
[0087]
本发明具有如下有益效果:
[0088]
针对柔性机械臂,本发明通过一种动力学建模方法,将绳索的摩擦和弹性变形等因素综合考虑与分析,对柔性机械臂进行动力学建模,利用所建立的动力学模型,能够准确地预测柔性机械臂的动力学输出(运动轨迹/表现)。经过实验测试,基于建模的仿真预测结果与实验测量结果取得一致,验证了本发明方法的正确性和有效性。由于本发明的方法全面考虑了绳索摩擦和弹性变形等因素对系统动力学特性的影响,利于精准地进行绳长模式的控制输入。本发明有利于设计、分析和/或控制具有高运动精度的柔性机械臂。
附图说明
[0089]
图1为现有的柔性机械臂动力学建模的示意图。
[0090]
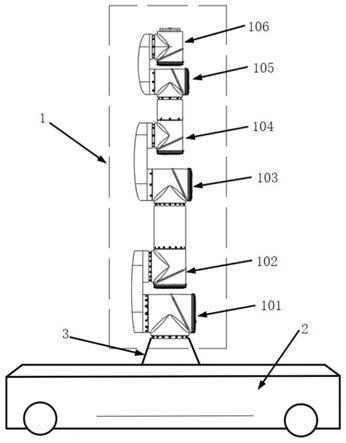
图2为本发明实施例的方法适用的一种柔性机械臂的结构示意图。
[0091]
图3为ale绳索单元的示意图。
[0092]
图4为作用在过孔处的摩擦力示意图。
[0093]
图5为惯性坐标系与随体坐标系的示意图。
[0094]
图6为绳索联动机构的示意图。
[0095]
图7为含两个联动段的柔性机械臂。
[0096]
图8为柔性机械臂气浮台实验装置。
[0097]
图9为绳长控制输入。
[0098]
图10为柔性机械臂关节角:(a)和(c)为仿真结果;(b)和(d)为实验结果。
[0099]
图11为本发明实施例的方法的流程图。
具体实施方式
[0100]
以下对本发明的实施方式做详细说明。应该强调的是,下述说明仅仅是示例性的,而不是为了限制本发明的范围及其应用。
[0101]
需要说明的是,当元件被称为“固定于”或“设置于”另一个元件,它可以直接在另一个元件上或者间接在该另一个元件上。当一个元件被称为是“连接于”另一个元件,它可以是直接连接到另一个元件或间接连接至该另一个元件上。另外,连接既可以是用于固定作用也可以是用于耦合或连通作用。
[0102]
需要理解的是,术语“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明实施例和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
[0103]
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多该特征。在本发明实施例的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
[0104]
图2示出如下实施例针对的柔性机械臂的结构及原理,该柔性机械臂由若干刚性臂杆1通过万向节2依次相连组成,这些刚性臂杆1被分为若干联动段3,每个联动段3由三根驱动绳索4驱动,而联动段中的各关节在联动绳索5的约束下同步转动。为了便于描述,对刚性臂杆和关节依次编号,如图2所示。参阅图2至图11,本发明实施例中首先对该柔性机械臂进行动力学建模,包括:驱动绳索建模、刚性臂杆建模和联动绳索建模。利用所建动力学模型进行仿真,可以对柔性机械臂的动力学输出(如各关节角的时间历程)进行预测。
[0105]
驱动绳索动力学建模
[0106]
为了便于研究绳长模式的控制输入,也为了便于分析绳索摩擦和弹性变形对系统动力学特性的影响,并尽量减少动力学建模所引入的自由度,采用任意拉格朗日
‑
欧拉(ale)方法对驱动绳索进行建模。如图3所示,一个ale绳索单元的广义坐标可以表示为
[0107][0108]
其中r
k
(k=1,2)为节点k的位置坐标,而s
k
为物质坐标。通过引入一定约束,节点可以退化为拉格朗日节点或欧拉节点。如引入约束s
k
‑
s0=0,则对应为拉格朗日节点;引入约束r
k
‑
r0=0,则对应为欧拉节点。ale绳索单元的动力学方程可以表示为
[0109][0110]
其中m
ele
为索单元的广义质量矩阵,q
f
为包含摩擦力等外力的广义力,q
e
为绳索弹性力的广义力,q
p
为物质坐标变化引入的附加惯性力的广义力。
[0111]
由于过孔厚度远小于驱动绳索长度,所以过孔处可看作是一个欧拉节点,即有如下约束方程:
[0112]
r
i
‑
r
hole,i
=0
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(71)
[0113]
为了便于描述绳索与过孔接触点的黏滞
‑
滑移运动,采用库伦干摩擦模型建模。对
于点接触的摩擦问题,摩擦力可以表示为
[0114][0115]
其中f和n分别为摩擦力和正压力,μ和μ
′
分别为动静摩擦系数,f
τ
为沿切向方向的作用力之和,v
τ
为接触点相对切向速度。如图4所示,通过积分可以得到作用于绳索与过孔接触区域的摩擦力如下:
[0116][0117]
其中f
t
为绳索在过孔处所受摩擦力的总和,θ为过孔处的绳索包角,f
max
为最大静摩擦力,表示如下:
[0118]
f
max
=min(t1,t2)
·
(e
μ
′
θ
‑
1)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(74)
[0119]
上述摩擦力的广义力可表示为
[0120]
q
friction
=[01×3,f
t
]
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(75)
[0121]
刚性臂杆动力学建模
[0122]
如图5所示,分别建立惯性坐标性和随体坐标系,则臂杆i的广义坐标可以表示为
[0123][0124]
其中q
ci
=[x
i
,y
i
,z
i
]
t
为臂杆i的质心坐标,q
ei
=[e
0i
,e
1i
,e
2i
,e
3i
]
t
为四元数向量。臂杆i相对于臂杆i
‑
1的旋转矩阵可以表示为
[0125][0126]
其中r
i
和r
i
‑1分别为相应臂杆的旋转矩阵,i/(i
‑
1)表示i相对于i
‑
1。因此,臂杆i与臂杆i
‑
1的相对转角为
[0127]
θ
i/(i
‑
1)
=f
r
‑
θ
(r
i/(i
‑
1)
)
ꢀꢀꢀ
(78)
[0128]
函数f
r
‑
θ
与欧拉旋转顺序有关。臂杆i的角速度在其随体坐标系的表示为
[0129][0130]
因此,臂杆i相对于臂杆i
‑
1的角速度在臂杆i随体坐标系下的表示为
[0131]
ω
i/(i
‑
1)
=ω
′
i
‑
r
i/(i
‑
1)
ω
′
i
‑1ꢀꢀꢀ
(80)
[0132]
根据欧拉运动学公式,有
[0133][0134]
其中b
i/(i
‑
1)
与欧拉旋转顺序和相对转角θ
i/(i
‑
1)
有关。上式取逆得
[0135][0136]
自由臂杆i的动力学方程可以表示为
[0137][0138]
其中m
i
为臂杆i的质量矩阵,q
i
为广义力向量,为动能对广义坐标的偏导
数。广义力向量由下式确定:
[0139][0140]
其中f
i
和m
′
分别为作用在臂杆i上的力和力偶,包括重力、联动绳索作用力偶等。
[0141]
联动绳索动力学建模
[0142]
为了避免ale绳索单元的进一步使用对系统自由度的增加,便于程序的高效求解,联动绳索采用与驱动绳索不同的建模方法。绳索联动机构的原理如图6所示,考虑通过联动绳索相连的两个相邻关节i和j,采用修正的库伦摩擦模型对绳索与导管的摩擦力进行建模,则联动绳索两端的张力可以表示为
[0143][0144]
并且
[0145][0146]
其中l
lc
为联动绳索长度,θ
lc
为联动绳索的空间包角,v
τ1
和v
τ2
为这两根联动绳索相对于导管的切向速度,δl1和δl2为这两根绳索的伸长量,μ
m
为修正的库伦摩擦系数。绳索的伸长量由下式确定:
[0147][0148]
其中t
p
为联动绳索预紧力,r
lc
为滑轮半径,e
c
和a
c
分别为联动绳索的杨氏模量和横截面积。因此,这一对联动绳索作用在关节i的联动力偶为
[0149][0150]
其中
[0151][0152]
k
lci
称为联动刚度系数,而c
lci
为联动阻尼系数。同样,作用在关节j的联动力偶为
[0153][0154]
其中
[0155][0156]
每个关节都受到前后两个关节联动绳索的综合作用,因此作用在关节i的联动力偶可以表示为
[0157][0158]
其中矩阵k
c
和c
c
由联动刚度系数和联动阻尼系数组成。上述联动力偶作用在臂杆i和i
‑
1上的广义力分别为
[0159][0160]
柔性机械臂整体动力学方程与求解
[0161]
柔性机械臂系统的广义坐标可以表示为
[0162][0163]
其中m和n分别表示驱动绳索的节点数和刚性臂杆数。通过组装所有的质量矩阵、广义力向量和约束向量等,系统整体的动力学方程可以表示为
[0164][0165]
其中m为广义质量矩阵,q为包含重力、弹性力、科氏力、联动力偶等在内的广义力向量,φ为包含关节约束、欧拉或拉格朗日节点约束、非定常绳长输入等运动学约束的向量,φ
q
为雅克比矩阵,λ为拉格朗日乘子向量。引入鲍姆加特稳定化方法抑制求解过程的约束漂移问题:
[0166][0167]
其中α
b
和β
b
为正常数。上式等价为
[0168][0169]
其中
[0170][0171]
联立(95)和(97)两式可得
[0172][0173]
将上式代入到式(97),则可以得到系统的拉格朗日乘子向量如下:
[0174][0175]
其中
[0176][0177]
再将式(100)代入式(99),则可以得到常微分方程形式的柔性机械臂动力学如下:
[0178][0179]
因此上式即可通过常微分方程的常用数值算法进行求解。
[0180]
本发明中的建模方法全面考虑了绳索摩擦和弹性变形等因素对系统动力学特性的影响,利用所建模型,能够准确地预测柔性机械臂的动力学输出,从而也有利于进行绳长模式的控制输入。
[0181]
为了检验本发明的建模方法对实际机械系统的描述能力,对图7所示的柔性机械臂进行动力学建模和仿真,并将结果与图8所示的实验测量进行对比。图9为给定的绳长控制输入。图10为利用本发明建模进行仿真预测与实验测量所得的各关节角的时间历程图。由于摩擦和绳索弹性变形的综合作用,联动段的各关节角不能保证严格相等。仿真预测结果与实验测量结果取得一致,从而验证了本发明方法的正确性和有效性。本发明中提出的建模方法能够有效反映绳索的弹性变形以及所受的摩擦,故所预测的各关节角的时间历程与实验测量结果一致性高。
[0182]
本发明的背景部分可以包含关于本发明的问题或环境的背景信息,而不一定是描述现有技术。因此,在背景技术部分中包含的内容并不是申请人对现有技术的承认。
[0183]
以上内容是结合具体/优选的实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,其还可以对这些已描述的实施方式做出若干替代或变型,而这些替代或变型方式都应当视为属于本发明的保护范围。在本说明书的描述中,参考术语“一种实施例”、“一些实施例”、“优选实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。尽管已经详细描述了本发明的实施例及其优点,但应当理解,在不脱离专利申请的保护范围的情况下,可以在本文中进行各种改变、替换和变更。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。