一种多工位3d打印机
技术领域
1.本发明涉及一种3d打印机,具体涉及一种多工位3d打印机。
背景技术:
2.3d打印(3d printing)属于快速成型技术的一种,又称增材制造;它是一种以数字模型为基础,利用激光、热熔喷嘴等方式将塑料、金属、陶瓷粉末等材料进行逐层堆积黏结成型来构造物件的技术。近年来,3d打印技术广泛应用于工业设计、珠宝、汽车、航空航天、牙科和医疗产业、教育等众多领域都有应用。
3.目前常见的3d打印机有选区激光熔化slm 、选择性激光烧结sls、三维粉末粘接、熔融层积成型 fdm、等多种类型。其中三维粉末粘接打印,即3dp工艺技术。3dp工艺与sls工艺类似,是采用粉末材料成形,如陶瓷粉末,金属粉末。所不同的是材料粉末不是通过烧结连接起来的,而是通过喷头用粘接剂(如硅胶)将零件的截面“印刷”在材料粉末上面。用粘接剂粘接的零件强度较低,还须后处理。具体工艺过程如下:上一层粘结完毕后,成型缸下降一个打印层厚距离,通常为0.013~0.1mm,供粉缸推出若干粉末,并被铺粉辊推到成型缸中铺平。喷头在计算机控制下,按下一建造截面的成形数据有选择地喷射粘结剂建造层面。如此周而复始地送粉、铺粉和喷射粘结剂,最终完成一个三维粉体的粘结打印。未被喷射粘结剂的地方为干粉,在成形过程中起支撑作用,且成形结束后去除。
4.随着制造业的进步,很多产品需要在不同的部分采用不同的材料制备,以获得不同的性能。但目前市场上主流的3d打印机,基本上都是只能采用单一材料进行物件的打印,从而使得3d打印机有了比较大的局限性,无法一次性打印出由二种材料甚至多种材料组成的零件。对于3dp工艺同样如此。
5.cn105196549b曾公开一种并行多工位式3d打印机,该发明提出一种新型的适合于快速成型技术的并行多工位式3d打印机,包括计算机、支架、3d打印机组、输送带系统。其中3d打印机组是根据需要并排放置多个工位的3d打印机,由计算机进行打印任务调控,实现并行式流水线打印。
6.上述现有专利的打印机,存在以下不便。1虽然能够在一个产品中实现多种材料打印,但是采用固定的打印流水线导轨做引导,存在流水线导轨结构复杂,控制调度不便,灵活性差的缺陷。2每层打印前铺粉时,采用常规的铺粉辊装置和粉缸配合完成铺粉,存在结构复杂、速度慢,铺粉后表面容易存在波纹,平整度低等缺陷。3具体打印过程是采用经典的打印模式,即每铺一层粉料,采用打印头沿该层产品轮廓打印一遍,并逐层打印获得产品,这样由于打印用粘结剂的作用限制,每层粉料厚度不能够太厚,每铺一层粉料采用打印头打印一遍,使得打印效率较低;如果增加每层粉料的厚度以提高打印效率,则会导致打印质量和精度的下降,故打印效率和质量精度无法两全。
技术实现要素:
7.针对上述现有技术的不足,本发明所要解决的技术问题是:怎样提供一种能够方
便实现在一件产品中打印不同材料,且结构简单,控制灵活方便的多工位3d打印机,并进一步使其能够提高铺粉精度和便捷性,能够提高打印效率和质量精度。
8.为了解决上述技术问题,本发明采用了如下的技术方案:一种多工位3d打印机,包括水平设置的打印平台,打印平台上设置有多处打印工位,每个打印工位固定设置有一套打印装置,还包括成形缸装置和引导系统,引导系统用于引导成形缸装置和打印装置对接;其特征在于,所述引导系统为无固定导轨式引导系统,所述无固定导轨式引导系统能够根据需要生成引导路径。
9.这样,取消了固定式导轨,改为根据需要生成,使得控制更加灵活方便。
10.进一步地,所述无固定导轨式引导系统,包括设置在打印平台表面的多处定位点,各处定位点位置设置有定位引导构件,所述定位点阵列式排布构成二维引导点云阵列;引导系统还包括自动导引车,自动导引车上设置有能够和各处定位点的定位引导构件感应定位的点云检测传感器,自动导引车下方还设置有万向轮系统并和驱动电机相连,驱动电机能够驱动万向轮系统转向行驶;所述成形缸装置安装在自动导引车上。
11.这样,本设备使用时,可以依靠点云检测传感器对各处定位点上定位引导构件位置实现检测,并控制自动导引车在不同的定位点之间行驶前进,依靠二维引导点云阵列控制规划生成行驶路径,使得成形缸装置能够跟随自动导引车在打印平台上行走并完成不同打印装置之间的对接,进而实现了在一件产品中不同部位打印不同的材料,满足不同部位的性能差异需求。同时具有控制灵活多变,能够更好地避免干涉,实现更多打印顺序可能性的优点;打印工位和自动导引车数量可根据实际生产需要进行布置。
12.进一步地,所述定位引导构件为电磁发生器,所述点云检测传感器为磁导航传感器。
13.这样电磁发生器可以通过计算机等控制装置进行开闭控制,使用时,可以沿需要的行驶路径将路径经过的电磁发生器打开,行驶路径上的电磁发生器串联起来,形成类似引导磁条的效果。同时将其余电磁发生器关闭,再利用磁导航传感器引导自动导引车跟随路径行驶。这样可以更好地根据对应的自动导引车的需要生成不同的行驶路径,更好地规避其余自动导引车的干涉,这样打印平台上可以设置多处打印工位并布置多量自动导引车,使得同一打印平台上能够实现更多的自动导引车共同工作参与打印,极大地提高了效率。同时行驶路径屏蔽掉了其他定位点的干涉,极大地提高了行驶路径的可靠性和稳定性。
14.进一步地,定位引导构件埋设在打印平台上表面下方。
15.这样可以提高保护,延长使用寿命。
16.进一步地,各处定位点中,还包括有至少一处无线充电位,无线充电位下方埋设有无线充电装置,所述自动导引车下表面中部还对应设置有无线充电线圈,无线充电线圈和安装在自动导引车上的蓄电池相连,蓄电池和所述驱动电机相连。
17.这样,能够实现对自动导引车的自动充电行驶续航,使其更加方便控制自动导引车的移动顺序和路径。
18.进一步地,至少具有部分所述无线充电位位于打印平台上打印工位处。
19.这样,方便自动导引车驶入打印工位处后,在打印等待的时间进行充电,使得充电过程不占用工作时间。
20.进一步地,自动导引车上还设置有无线通讯控制模块,无线通讯控制模块和驱动
电机相连并实现控制。
21.这样,方便实现在远处通过计算机等控制装置无线通讯控制自动导引车按照规划的路径行驶前进。
22.进一步地,自动导引车或者打印工位上还设置有定位传感器,在打印工位或者自动导引车上还对应设置有定位传感器检测构件。
23.这样使得自动导引车行驶到达打印工位时,可以依靠定位传感器和定位传感器检测构件之间的配合检测,实现对自动导引车的精确定位,更好地保证自动导引车上的成形缸装置和打印工位上的打印装置能够精确对接,保证打印质量。
24.进一步地,所述定位传感器优选采用接触开关,定位传感器检测构件采用能够和接触开关相互配合实现接触检测的硬性构件。
25.这样具有结构简单,实施便捷,使用可靠的优点。
26.进一步地,接触开关为两对且分别安装在自动导引车两侧向上设置的接触开关安装架上,所述定位传感器检测构件为对应形成在打印工位的一对安装支架上的接触用凸起。
27.这样,可以更好地方便实现自动导引车在打印工位处的精确定位。
28.进一步地,所述万向轮系统包括安装在自动导引车下方四角的四个麦克纳姆轮,每个麦克纳姆轮分别和一个对应的驱动电机相连。
29.这样,驱动电机驱动四个麦克纳姆轮不同转速旋转可使自动导引车向不同方向移动,故可以更好地控制自动导引车转向行驶。
30.进一步地,所述自动导引车包括一个水平设置的底板,所述麦克纳姆轮和对应的驱动电机安装在底板下方,成形缸装置安装在底板中部上方,所述点云检测传感器安装在底板下方,所述无线充电线圈安装在底板下方,所述无线通讯控制模块安装在底板上方。
31.这样,更好地方便各构件功能的实现。
32.进一步地,所述成形缸装置,包括一个固定架空安装在自动导引车中部上方位置的成形缸,成形缸上端具有水平向外延伸的一圈翻边形成打印平面,成形缸的底板托盘可上下滑动地配合在成形缸内腔壁上,成形缸装置还包括一个安装在成形缸下方的自动导引车上的升降装置,升降装置的伸缩臂向上支承连接在底板托盘下表面。
33.这样,升降装置将底板托盘向上托起到成型缸内腔上方位置后,开始铺粉打印,每打印一层后升降装置向下缩回一层的距离,然后再次在成型缸内腔铺粉打印,这样层层下降,直至打印完毕。故具有结构简单,方便控制,稳定可靠的特点。
34.进一步地,成型缸下端四角具有向下的支撑柱,成型缸上端四周翻边下方位置还设置有斜向外下方设置的支撑架。
35.这样,可以更好地保证成型缸的稳定性。
36.进一步地,成型缸前端的打印平面上还设置有一个废料容纳槽。
37.这样,可以供铺料时产生的废料落下,更好地辅助铺料。
38.进一步地,打印工位由间隔成对地安装在打印平台一侧的多对安装支架形成,安装支架整体呈倒l形的支臂状,且支臂前端沿背离打印平台边缘方向水平向前延伸设置,打印装置固定在安装支架上。
39.这样,更加方便打印装置的安装,以及方便成形缸装置和打印装置的对接。
40.进一步地,打印装置包括沿支臂长度方向安装在安装支架上端支臂上的y轴导轨,两根y轴导轨之间沿水平方向垂直架设有x轴导轨,x轴导轨两端可滑动地配合在y轴导轨上,还设置有用于控制x轴导轨在y轴导轨上滑动的y轴运动控制机构,x轴导轨上可滑动地配合安装有打印头支架并设置有用于控制打印头支架在x轴导轨上滑动的x轴运动控制机构,打印头支架上安装有打印喷头;打印装置还包括安装在安装支架后端位置上方的供粉机构,还包括铺粉机构。
41.这样,方便控制打印喷头的x向和y向运动控制。
42.进一步地,所述y轴运动控制机构为y轴电动滑台,y轴电动滑台的导轨构成一侧的y轴导轨,y轴电动滑台的滑台和x轴导轨的一端固定,另一侧的y轴导轨为直线导轨,x轴导轨的另一端可滑动地卡接配合在直线导轨上。
43.这样,具有结构简单,控制方便,控制精度可靠的优点。
44.进一步地,所述x轴运动控制机构为x轴电动滑台,x轴电动滑台的导轨形成x轴导轨,x轴电动滑台的滑台上安装打印头支架。
45.这样,具有结构简单,控制方便,控制精度可靠的优点。
46.进一步地,供粉机构包括一个粉箱,粉箱下部设置有出料口,出料口处设置有定量出料机构,定量出料机构下方连接有一个向前下方延伸的出料梭槽,出料梭槽下端槽口沿两个对应安装支架之间的宽度方向水平布置。
47.这样,方便供粉机构根据每次铺料所需数量定量出料供粉,并方便粉料下料进入到铺粉机构中。
48.进一步地,定量出料机构包括一个水平设置在出料口处的计量套筒,出料口上下贯通计量套筒相连,计量套筒内部轴心处同轴设置有计量转辊,计量转辊的周向外表面上沿周向均匀分布设置有顺轴向延伸的矩形叶片,矩形叶片长度和计量套筒内腔长度一致且外侧表面和计量套筒内腔壁可转动地贴合设置,计量转辊的一端可转动地穿出计量套筒端部并和一个计量用伺服电机相连。
49.这样,可以依靠计量用伺服电机控制计量转辊转动,每次转动固定角度,可以利用两个叶片之间的腔室刮动固定体积大小的粉料往下落料,保证均匀定量供粉。
50.进一步地,粉箱的两端固定在竖向设置的粉箱安装板侧面上,粉箱安装板下端和安装支架固定,计量用伺服电机固定在粉箱安装板另一侧侧面上。
51.这样,方便供粉机构的安装固定。
52.进一步地,铺粉机构包括一个沿两个对应安装支架之间的宽度方向水平布置的粉料容纳槽,粉料容纳槽两端通过向上的连接板悬空固定在x轴导轨靠近两端位置下方,粉料容纳槽上下贯通设置且后端(和粉箱相邻的一端)侧面上具有向下设置的刮刀,刮刀下端具有水平的位于打印平面高度的刀刃,粉料容纳槽一次能够容纳至少一层打印所需铺粉的粉料,x轴导轨滑动至y轴导轨后端时,粉料容纳槽上端能够和出料梭槽下端槽口对接。
53.这样,铺粉时粉料容纳槽跟随x轴导轨滑动到y轴导轨后端,粉料从定量出料机构定量出料并通过出料梭槽落入到粉料容纳槽内,然后随着x轴导轨沿y轴导轨向前滑动,依靠刮刀向前将粉料容纳槽内落下的粉料刮平,实现铺料。这样采用刮刀铺料更加便捷且粉料表面平整,而且铺料机构和打印喷头均集成安装在x轴导轨上,打印喷头可以跟随铺料机构在铺料运动过程中随即实现打印,而且可以实现一次铺料往复过程中打印喷头各打印一
次,提高打印质量和效率。
54.进一步地,打印头支架前端侧面向下安装连接有一个呈向前的l形的前侧喷头安装板,前侧喷头安装板下端的水平部分结构上安装有一个第一打印喷头。
55.这样,在铺粉装置随x轴导轨向前运动铺料时,即可控制打印喷头在x轴导轨前方按照该层产品轮廓先喷射一遍粘结剂,实现一次预打印,随即粉料铺设其上和粘结剂结合并被刮刀刮平,然后在x轴导轨复位过程中,再控制打印喷头正常打印一次。故实现了一次铺料两次打印,能够提高产品成形的强度,还能够增加每层打印的厚度以提高打印效率。同时整体结构更加简单,且铺料方便快捷可靠。
56.作为一种更好的选择,打印头支架上还设置有用于控制前侧喷头安装板竖向滑动的喷头竖向运动控制机构。
57.这样,第一打印喷头位置的高度可上下调节,使得一次铺料过程中的两次打印均可以调整打印喷头位置使其贴着粉料上表面打印,以更好地提高打印精度。具体地说,在第一打印喷头随x轴导轨向前运动铺料前打印时,可以向下调节其位置,使得第一打印喷头处于低出刮刀一层粉料高度的位置,贴着上一层粉料上表面完成粘结剂喷射打印,更好地保证该遍打印的产品轮廓精度。然后该遍打印结束后在第一打印喷头随x轴导轨向后运动复位时,向上调节第一打印喷头使其回复至和刮刀水平的位置实现正常打印;x轴导轨向后运动复位至起始端后该层打印结束,成型缸中底板托盘下落一层粉料距离,并控制第一打印喷头向下运动相同距离进行下一层打印,以此循环直至打印结束。故能够更好地提高整体产品外形质量,而且结构较简单,利于实施。
58.进一步地,所述喷头竖向运动控制机构包括一个竖向固定设置在打印头支架一侧的竖向导轨,前侧喷头安装板上端的一侧可滑动地配合在竖向导轨上,竖向导轨的上端固定设置有一个喷头竖向运动控制电机,还包括一个和竖向导轨间隔并列设置的螺杆,喷头竖向运动控制电机和螺杆传动连接并能够带动螺杆旋转,螺杆上螺纹配合旋接有一个螺母,螺母相对固定在前侧喷头安装板上端。
59.这样,喷头竖向运动控制电机旋转带动螺杆转动,依靠竖向导轨通过前侧喷头安装板对螺母的转动限位,通过螺杆和螺母构成的丝杠螺母传动副,带动前侧喷头安装板实现上下滑动控制。这样,具有结构简单,控制可靠,运动稳定,且控制精度高的特点。
60.作为另一种选择,前侧喷头安装板固定在打印头支架前端侧面;打印头支架后端侧面上还安装有一个呈向后的l形的后侧喷头安装板,后侧喷头安装板下端的水平部分结构上安装有一个第二打印喷头,打印头支架上还设置有用于控制后侧喷头安装板竖向滑动的喷头竖向运动控制机构。
61.这样,在x轴导轨运动回y轴导轨后端上料时,喷头竖向运动控制机构可以控制第二打印喷头向上升起超过出料梭槽高度以避免干涉。然后正常打印时,控制第二打印喷头向下落回到打印位置,使得依靠本结构的两个打印喷头能够在铺料机构随x轴导轨向前运动铺料往返的过程中至少实现两次打印。例如,正常打印时,第一打印喷头和第二打印喷头可以设置原始位置位于和刮刀相同高度水平面,在铺料装置向前铺料时,由后方的第二打印喷头实现对该层粉料的第一次打印,在铺料装置对该层粉料铺料完成往回复位的过程中,由前方的第一打印喷头实现对该层粉料的第二次打印,故一次铺料两次打印可以更好地提高产品质量和效率,其中第二次打印的产品轮廓还可以取前后两次铺料的产品轮廓之
间的区域范围,更好地提高两次铺粉之间的外形轮廓衔接效果,更好地提高产品精度。同时由于两次打印各自采用了不同的打印喷头,故还可以各自采用不同配比调整的粘结剂,使其各自性能更加具有针对性,例如第一次打印采用正常3d打印效果的粘结剂,第二次打印采用能够更好地提高已打印粉料层和待铺设粉料层之间结合效果的粘结剂,这样就可以更好地提高最终打印效果,提高产品质量。另外,对于一些特殊产品,例如对于前后方向上宽度一致的产品,本装置甚至可以实现一次往返铺料的过程中打印四次的特殊效果,更好地提高产品质量和生产效率。
62.进一步地,所述喷头竖向运动控制机构,包括一个竖向固定设置在打印头支架上的竖向导轨,后侧喷头安装板上端的一侧可滑动地配合在竖向导轨上,竖向导轨的上端固定设置有一个喷头竖向运动控制电机,还包括一个和竖向导轨间隔并列设置的螺杆,喷头竖向运动控制电机和螺杆传动连接并能够带动螺杆旋转,螺杆上螺纹配合旋接有一个螺母,螺母相对固定在后侧喷头安装板上端。
63.这样,喷头竖向运动控制电机旋转带动螺杆转动,依靠竖向导轨通过前侧喷头安装板对螺母的转动限位,通过螺杆和螺母构成的丝杠螺母传动副,带动后侧喷头安装板实现上下滑动控制。故具有结构简单,控制可靠,运动稳定,且控制精度高的特点。
64.综上所述,本装置具有能够方便实现在一件产品中打印不同材料,且结构简单,控制灵活方便,能够提高铺粉精度和便捷性,能够提高打印效率和质量精度的优点。
附图说明
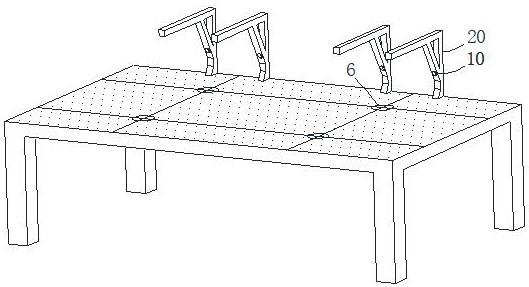
65.图1为本发明第一实施例的结构示意图。
66.图2为图1中单独打印平台的结构示意图。
67.图3为图1中单独打印装置的结构示意图。
68.图4为图3的俯视图。
69.图5为图1中单独供粉机构的结构示意图。
70.图6为图5的侧剖视图。
71.图7为图1中铺粉机构的结构示意图。
72.图8为图7的侧剖视图。
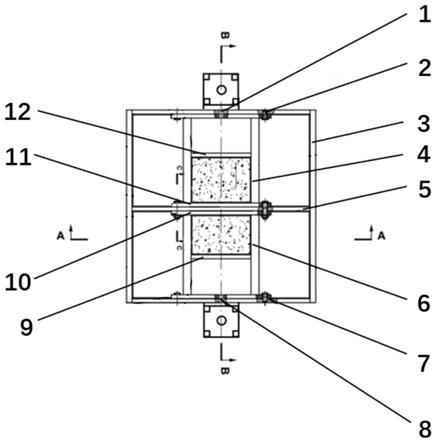
73.图9为图1中单独自动导引车的正视图。
74.图10为图9的立体结构示意图。
75.图11为第二实施例中的打印装置的结构示意图。
具体实施方式
76.下面结合具体实施方式对本发明作进一步的详细说明。
77.第一实施例:如图1
‑
10所示,一种多工位3d打印机,包括水平设置的打印平台1,打印平台上设置有多处打印工位,每个打印工位固定设置有一套打印装置,还包括成形缸装置和引导系统,引导系统用于引导成形缸装置和打印装置对接;其特点在于,所述引导系统为无固定导轨式引导系统,所述无固定导轨式引导系统能够根据需要生成引导路径。
78.这样,取消了固定式导轨,改为根据需要生成,使得控制更加灵活方便。
79.其中,所述无固定导轨式引导系统,包括设置在打印平台表面的多处定位点2,各
处定位点2位置设置有定位引导构件,所述定位点阵列式排布构成二维引导点云阵列;引导系统还包括自动导引车3,自动导引车3上设置有能够和各处定位点的定位引导构件感应定位的点云检测传感器4,自动导引车3下方还设置有万向轮系统并和驱动电机5相连,驱动电机5能够驱动万向轮系统转向行驶;所述成形缸装置安装在自动导引车3上。
80.这样,本设备使用时,可以依靠点云检测传感器对各处定位点上定位引导构件位置实现检测,并控制自动导引车在不同的定位点之间行驶前进,依靠二维引导点云阵列控制规划生成行驶路径,使得成形缸装置能够跟随自动导引车在打印平台上行走并完成不同打印装置之间的对接,进而实现了在一件产品中不同部位打印不同的材料,满足不同部位的性能差异需求。同时具有控制灵活多变,能够更好地避免干涉,实现更多打印顺序可能性的优点;打印工位和自动导引车数量可根据实际生产需要进行布置。
81.其中,所述定位引导构件为电磁发生器,所述点云检测传感器4为磁导航传感器。
82.这样电磁发生器可以通过计算机等控制装置进行开闭控制,使用时,可以沿需要的行驶路径将路径经过的电磁发生器打开,行驶路径上的电磁发生器串联起来,形成类似引导磁条的效果。同时将其余电磁发生器关闭,再利用磁导航传感器引导自动导引车跟随路径行驶。这样可以更好地根据对应的自动导引车的需要生成不同的行驶路径,更好地规避其余自动导引车的干涉,这样打印平台上可以设置多处打印工位并布置多量自动导引车,使得同一打印平台上能够实现更多的自动导引车共同工作参与打印,极大地提高了效率。同时行驶路径屏蔽掉了其他定位点的干涉,极大地提高了行驶路径的可靠性和稳定性。
83.其中,定位引导构件埋设在打印平台1上表面下方。
84.这样可以提高保护,延长使用寿命。
85.其中,各处定位点中,还包括有至少一处无线充电位6,无线充电位6下方埋设有无线充电装置,所述自动导引车下表面中部还对应设置有无线充电线圈7,无线充电线圈7和安装在自动导引车上的蓄电池相连,蓄电池和所述驱动电机5相连。
86.这样,能够实现对自动导引车的自动充电行驶续航,使其更加方便控制自动导引车的移动顺序和路径。
87.其中,至少具有部分所述无线充电位6位于打印平台上打印工位处。
88.这样,方便自动导引车驶入打印工位处后,在打印等待的时间进行充电,使得充电过程不占用工作时间。
89.其中,自动导引车上还设置有无线通讯控制模块8,无线通讯控制模块8和驱动电机相连并实现控制。
90.这样,方便实现在远处通过计算机等控制装置无线通讯控制自动导引车按照规划的路径行驶前进。
91.其中,自动导引车或者打印工位上还设置有定位传感器9,在打印工位或者自动导引车上还对应设置有定位传感器检测构件(图中未显示)。实施时,定位传感器检测构件安装在打印工位的安装支架20上的定位传感器检测构件安装孔10内。
92.这样使得自动导引车行驶到达打印工位时,可以依靠定位传感器和定位传感器检测构件之间的配合检测,实现对自动导引车的精确定位,更好地保证自动导引车上的成形缸装置和打印工位上的打印装置能够精确对接,保证打印质量。
93.其中,所述定位传感器9优选采用接触开关,定位传感器检测构件采用能够和接触
开关相互配合实现接触检测的硬性构件。
94.这样具有结构简单,实施便捷,使用可靠的优点。
95.其中,接触开关为两对且分别安装在自动导引车两侧向上设置的接触开关安装架11上,所述定位传感器检测构件为对应形成在打印工位的一对安装支架20上的接触用凸起。
96.这样,可以更好地方便实现自动导引车在打印工位处的精确定位。
97.其中,所述万向轮系统包括安装在自动导引车下方四角的四个麦克纳姆轮12,每个麦克纳姆轮12分别和一个对应的驱动电机5相连。
98.这样,驱动电机驱动四个麦克纳姆轮不同转速旋转可使自动导引车向不同方向移动,故可以更好地控制自动导引车转向行驶。麦克纳姆轮为成熟现有产品,具体结构不在此详述。
99.其中,所述自动导引车3包括一个水平设置的底板,所述麦克纳姆轮12和对应的驱动电机5安装在底板下方,成形缸装置安装在底板中部上方,所述点云检测传感器4安装在底板下方,所述无线充电线圈7安装在底板下方,所述无线通讯控制模块8安装在底板上方。
100.这样,更好地方便各构件功能的实现。
101.其中,所述成形缸装置,包括一个固定架空安装在自动导引车中部上方位置的成形缸13,成形缸上端具有水平向外延伸的一圈翻边形成打印平面14,成形缸的底板托盘15可上下滑动地配合在成形缸内腔壁上,成形缸装置还包括一个安装在成形缸下方的自动导引车上的升降装置16,升降装置16的伸缩臂向上支承连接在底板托盘下表面。
102.这样,升降装置将底板托盘向上托起到成型缸内腔上方位置后,开始铺粉打印,每打印一层后升降装置向下缩回一层的距离,然后再次在成型缸内腔铺粉打印,这样层层下降,直至打印完毕。故具有结构简单,方便控制,稳定可靠的特点。
103.其中,成型缸下端四角具有向下的支撑柱17,成型缸上端四周翻边下方位置还设置有斜向外下方设置的支撑架18。
104.这样,可以更好地保证成型缸的稳定性。
105.其中,成型缸前端的打印平面上还设置有一个废料容纳槽19。
106.这样,可以供铺料时产生的废料落下,更好地辅助铺料。
107.其中,打印工位由间隔成对地安装在打印平台一侧的多对安装支架20形成,安装支架20整体呈倒l形的支臂状,且支臂前端沿背离打印平台边缘方向水平向前延伸设置,打印装置固定在安装支架20上。
108.这样,更加方便打印装置的安装,以及方便成形缸装置和打印装置的对接。
109.其中,打印装置包括沿支臂长度方向安装在安装支架上端支臂上的y轴导轨21,两根y轴导轨21之间沿水平方向垂直架设有x轴导轨22,x轴导轨22两端可滑动地配合在y轴导轨21上,还设置有用于控制x轴导轨在y轴导轨上滑动的y轴运动控制机构,x轴导轨上可滑动地配合安装有打印头支架23并设置有用于控制打印头支架23在x轴导轨上滑动的x轴运动控制机构,打印头支架上安装有打印喷头(图中仅显示打印喷头安装孔);打印装置还包括安装在安装支架后端位置上方的供粉机构,还包括铺粉机构。
110.这样,方便控制打印喷头的x向和y向运动控制。
111.其中,所述y轴运动控制机构为y轴电动滑台,y轴电动滑台的导轨24构成一侧的y
轴导轨,y轴电动滑台的滑台25和x轴导轨22的一端固定,另一侧的y轴导轨为直线导轨26,x轴导轨22的另一端可滑动地卡接配合在直线导轨26上。
112.这样,具有结构简单,控制方便,控制精度可靠的优点。
113.其中,所述x轴运动控制机构为x轴电动滑台,x轴电动滑台的导轨27形成x轴导轨,x轴电动滑台的滑台上安装打印头支架23。其中,采用的电动滑台为现有产品,包括电机、导轨和滑台等构件形成并由电机以丝杠螺母副的传动方式驱动滑台沿导轨平动,具体结构不在此详述。
114.这样,具有结构简单,控制方便,控制精度可靠的优点。
115.其中,供粉机构包括一个粉箱30,粉箱30下部设置有出料口,出料口处设置有定量出料机构,定量出料机构下方连接有一个向前下方延伸的出料梭槽31,出料梭槽31下端槽口沿两个对应安装支架之间的宽度方向水平布置。
116.这样,方便供粉机构根据每次铺料所需数量定量出料供粉,并方便粉料下料进入到铺粉机构中。
117.其中,定量出料机构包括一个水平设置在出料口处的计量套筒,出料口上下贯通计量套筒32相连,计量套筒内部轴心处同轴设置有计量转辊33,计量转辊33的周向外表面上沿周向均匀分布设置有顺轴向延伸的矩形叶片,矩形叶片长度和计量套筒内腔长度一致且外侧表面和计量套筒内腔壁可转动地贴合设置,计量转辊33的一端可转动地穿出计量套筒端部并和一个计量用伺服电机34相连。
118.这样,可以依靠计量用伺服电机控制计量转辊转动,每次转动固定角度,可以利用两个叶片之间的腔室刮动固定体积大小的粉料往下落料,保证均匀定量供粉。
119.其中,粉箱30的两端固定在竖向设置的粉箱安装板35侧面上,粉箱安装板35下端和安装支架固定,计量用伺服电机34固定在粉箱安装板另一侧侧面上。
120.这样,方便供粉机构的安装固定。
121.其中,铺粉机构包括一个沿两个对应安装支架之间的宽度方向水平布置的粉料容纳槽36,粉料容纳槽36两端通过向上的连接板37悬空固定在x轴导轨靠近两端位置下方,粉料容纳槽上下贯通设置且后端(和粉箱相邻的一端)侧面上具有向下设置的刮刀38,刮刀38下端具有水平的位于打印平面高度的刀刃,粉料容纳槽一次能够容纳至少一层打印所需铺粉的粉料,x轴导轨滑动至y轴导轨后端时,粉料容纳槽上端能够和出料梭槽下端槽口对接。
122.这样,铺粉时粉料容纳槽跟随x轴导轨滑动到y轴导轨后端,粉料从定量出料机构定量出料并通过出料梭槽落入到粉料容纳槽内,然后随着x轴导轨沿y轴导轨向前滑动,依靠刮刀向前将粉料容纳槽内落下的粉料刮平,实现铺料。这样采用刮刀铺料更加便捷且粉料表面平整,而且铺料机构和打印喷头均集成安装在x轴导轨上,打印喷头可以跟随铺料机构在铺料运动过程中随即实现打印,而且可以实现一次铺料往复过程中打印喷头各打印一次,提高打印质量和效率。
123.其中,打印头支架前端侧面向下安装连接有一个呈向前的l形的前侧喷头安装板40,前侧喷头安装板40下端的水平部分结构上安装有一个第一打印喷头(图中仅仅显示了喷头安装孔)。
124.这样,在铺粉装置随x轴导轨向前运动铺料时,即可控制打印喷头在x轴导轨前方按照该层产品轮廓先喷射一遍粘结剂,实现一次预打印,随即粉料铺设其上和粘结剂结合
并被刮刀刮平,然后在x轴导轨复位过程中,再控制打印喷头正常打印一次。故实现了一次铺料两次打印,能够提高产品成形的强度,还能够增加每层打印的厚度以提高打印效率。同时整体结构更加简单,且铺料方便快捷可靠。
125.本实施例中,前侧喷头安装板40固定在打印头支架23前端侧面;打印头支架23后端侧面上还安装有一个呈向后的l形的后侧喷头安装板41,后侧喷头安装板41下端的水平部分结构上安装有一个第二打印喷头(图中仅显示了打印喷头安装孔),打印头支架23上还设置有用于控制后侧喷头安装板竖向滑动的喷头竖向运动控制机构。
126.这样,在x轴导轨运动回y轴导轨后端上料时,喷头竖向运动控制机构可以控制第二打印喷头向上升起超过出料梭槽高度以避免干涉。然后正常打印时,控制第二打印喷头向下落回到打印位置,使得依靠本结构的两个打印喷头能够在铺料机构随x轴导轨向前运动铺料往返的过程中至少实现两次打印。例如,正常打印时,第一打印喷头和第二打印喷头可以设置原始位置位于和刮刀相同高度水平面,在铺料装置向前铺料时,由后方的第二打印喷头实现对该层粉料的第一次打印,在铺料装置对该层粉料铺料完成往回复位的过程中,由前方的第一打印喷头实现对该层粉料的第二次打印,故一次铺料两次打印可以更好地提高产品质量和效率,其中第二次打印的产品轮廓还可以取前后两次铺料的产品轮廓之间的区域范围,更好地提高两次铺粉之间的外形轮廓衔接效果,更好地提高产品精度。同时由于两次打印各自采用了不同的打印喷头,故还可以各自采用不同配比调整的粘结剂,使其各自性能更加具有针对性,例如第一次打印采用正常3d打印效果的粘结剂,第二次打印采用能够更好地提高已打印粉料层和待铺设粉料层之间结合效果的粘结剂,这样就可以更好地提高最终打印效果,提高产品质量。另外,对于一些特殊产品,例如对于前后方向上宽度一致的产品,本装置甚至可以实现一次往返铺料的过程中打印四次的特殊效果,更好地提高产品质量和生产效率。
127.其中,所述喷头竖向运动控制机构,包括一个竖向固定设置在打印头支架上的竖向导轨42,后侧喷头安装板41上端的一侧可滑动地配合在竖向导轨42上,竖向导轨42的上端固定设置有一个喷头竖向运动控制电机43,还包括一个和竖向导轨间隔并列设置的螺杆44,喷头竖向运动控制电机和螺杆传动连接并能够带动螺杆旋转,螺杆44上螺纹配合旋接有一个螺母45,螺母相对固定在后侧喷头安装板上端。
128.这样,喷头竖向运动控制电机旋转带动螺杆转动,依靠竖向导轨通过前侧喷头安装板对螺母的转动限位,通过螺杆和螺母构成的丝杠螺母传动副,带动后侧喷头安装板实现上下滑动控制。故具有结构简单,控制可靠,运动稳定,且控制精度高的特点。
129.另外,实施时还需要安装计算机辅助控制系统,控制系统通过对导入的三维cad模型进行水平切片,分出各打印层切片数据,然后将切片数据发送到3d打印机进行打印,此为成熟现有技术,故不在此详述。
130.第二实施例。
131.本实施例和第一实施例相比。仅仅在打印装置的打印头安装结构上有所区别,本实施例中没有设置后侧喷头安装板及其上的第二打印喷头,而是将前侧喷头安装板可竖向滑动设置,其余部分结构均和第一实施例相同。
132.具体地说。参见图11,本实施例中,在打印头支架23上还设置有用于控制前侧喷头安装板40竖向滑动的喷头竖向运动控制机构。
133.这样,第一打印喷头位置的高度可上下调节,使得一次铺料过程中的两次打印均可以调整打印喷头位置使其贴着粉料上表面打印,以更好地提高打印精度。具体地说,在第一打印喷头随x轴导轨向前运动铺料前打印时,可以向下调节其位置,使得第一打印喷头处于低出刮刀一层粉料高度的位置,贴着上一层粉料上表面完成粘结剂喷射打印,更好地保证该遍打印的产品轮廓精度。然后该遍打印结束后在第一打印喷头随x轴导轨向后运动复位时,向上调节第一打印喷头使其回复至和刮刀水平的位置实现正常打印;x轴导轨向后运动复位至起始端后该层打印结束,成型缸中底板托盘下落一层粉料距离,并控制第一打印喷头向下运动相同距离进行下一层打印,以此循环直至打印结束。故能够更好地提高整体产品外形质量,而且结构较简单,利于实施。
134.其中,所述喷头竖向运动控制机构包括一个竖向固定设置在打印头支架23一侧的竖向导轨41,前侧喷头安装板40上端的一侧可滑动地配合在竖向导轨41上,竖向导轨41的上端固定设置有一个喷头竖向运动控制电机42,还包括一个和竖向导轨间隔并列设置的螺杆43,喷头竖向运动控制电机42和螺杆43传动连接并能够带动螺杆旋转,螺杆上螺纹配合旋接有一个螺母44,螺母44相对固定在前侧喷头安装板40上端。
135.这样,喷头竖向运动控制电机旋转带动螺杆转动,依靠竖向导轨通过前侧喷头安装板对螺母的转动限位,通过螺杆和螺母构成的丝杠螺母传动副,带动前侧喷头安装板实现上下滑动控制。这样,具有结构简单,控制可靠,运动稳定,且控制精度高的特点。
136.上述两种具体实施方式的装置,使用时,均能够实现以下生产模式。
137.一.单材料零件流水生产模式:此模式针对种类多、数量少、由一种材料构成零件的批量成产。生产时,将需要3d打印的零件三维cad模型导入计算机系统,系统对零件按照序号进行工位分配,如1、2、3
…
号零件各自在1、2、3
…
号工位进行打印,自动导引车驶入打印工位后开始打印。打印完成即自动驶出,等待人工进行后续处理,下一自动导引车驶入继续进行打印。
138.二.多材料零件流水生产模式:此模式突破现有基于3dp(三维粉末粘接)工艺打印机只能打印单一材料局限,满足新的打印需求,同时可批量成产。生产时,将零件的三维cad模型导入计算机,计算机将零件不同材料部分分配给放置对应材料的不同工位。打印时零件自下向上,如自动导引车先在1号工位打印完底部的a材料,再在计算机调度下前往2号工位打印中部的b材料,再前往计算机调度下前往3号工位打印顶部的c材料。
139.生产时的计算机调度流程可以为:对零件材料进行打印工位分配,若为单材料则分配一个工位、多材料则分配按材料种类进行分配;通过二维点云阵列为自动导引车规划路径,使其驶入对应打印工位;对零件自下而上进行切片处理,将切片截面数据发送至打印工位;层层递进;需切换材料打印时,再次对通过二维点云阵列规划路径,自动导引车驶入另一工位继续打印。
140.生产时的路径规划流程可以为:检测现有自动导引车位置;规避现有导引车位置;判断目标工位是否空闲;路径规划;若规划路径成功,则激活该路径覆盖的二维点云阵列;若规划路径失败,则规划自动导引车离开打印工位,使其驶入超车缓冲区等待,待目标工位空闲后再次进行路径规划。
141.综上所述,本装置具有能够方便实现在一件产品中打印不同材料,且结构简单,控制灵活方便,能够提高铺粉精度和便捷性,能够提高打印效率和质量精度的优点。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。