1.本发明涉及机械生产类技术领域,尤其涉及一种工业机械手。
背景技术:
2.机械手能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。机械手是最早出现的工业机器人,也是最早出现的现代机器人,它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
3.专利号为:cn108748133a提供一种便于拿取货物的工业机械手,涉及工业机械手技术领域。该便于拿取货物的工业机械手,包括稳定底座,所述稳定底座的上端外表面设置有旋转柱。该便于拿取货物的工业机械手,通过旋转柱、一号电机、滑轨、滑块、一号滑动轮、二号电机、定轮、二号滑动轮、皮带和升降带的配合,使抓手能够进行远近和上下抓取货物,能够对任何区域的货物进行抓取,操作灵活,通过一号机械臂、二号机械臂、垫块、一号支架、二号支架、一号马达、一号齿轮、二号马达、二号齿轮、弹簧和凸块的配合,使一号机械臂和二号机械臂不直接与货物接触,防止货物发生损坏,以及防止货物脱落,提高了安全性。
4.现有的机械手对花瓶抓取时,因为花瓶多为陶瓷和玻璃材质,硬而脆,口粗颈细,机械手抓取时施加力过大容易使花瓶破裂。
5.为此,本发明提出一种工业机械手。
技术实现要素:
6.本发明公开了一种工业机械手,在以解决机械手对花瓶抓取时,因为花瓶多为陶瓷和玻璃材质,硬而脆,口粗颈细,机械手抓取时施加力过大容易使花瓶破裂的问题。
7.为实现上述目的,本发明提供如下技术方案:
8.一种工业机械手,包括本体、传动机构和抓取机构,所述传动机构包括圆盘、电机、大齿轮和从动轮,所述传动机构用来传递动力,所述抓取机构包括滑轮、钢丝绳和滑块,所述抓取机构可用来对花瓶抓取。
9.通过设置传动机构和抓取机构方便滑轮上的钢丝绳运动,依靠花瓶自身的重力带动滑轮滑动,使钢丝绳形成的套索收缩,从而对花瓶的脖颈进行抓取,避免机械手直接抓取时施加力过大容易使花瓶破裂。
10.优选的,所述传动机构包括圆盘、电机、大齿轮和从动轮,所述圆盘与本体通过螺栓固定连接,圆盘中心设置电机,所述电机输出端与大齿轮固定连接,所述大齿轮设在圆盘上方外表面,所述大齿轮周围啮合有三个相同大小的从动轮且两两之间角度相隔120
°
,所述从动轮同样设在圆盘上方外表面。
11.通过设置圆盘连接本体,使得本体带动抓取机构自由移动,设置电机、大齿轮和从动轮用于对滑轮传递力矩。
12.优选的,所述滑轮上卷有钢丝绳,所述钢丝绳一端与滑轮固定,另一端穿过滑块的
顶部从滑块侧面出来,所述钢丝绳围成一圈后末端与滑块背面固定连接。所述滑轮、钢丝绳和滑块均设置三个。
13.设置滑块使得钢丝绳围成圈,能够调节钢丝绳从滑轮伸出的距离,适用于对不同长度不同口径的花瓶的抓取,分别设置三个滑轮、钢丝绳和滑块,更方便对花瓶进行抓取,增加了装置的稳定性。
14.优选的,所述滑块与连接块均为韧性材料。
15.设置滑块与连接块为韧性材料,防止钢丝绳套在花瓶脖颈后,滑块与连接块接触花瓶时冲击力过大对花瓶造成破坏。
16.优选的,三个所述钢丝绳通过三个滑块围成一圈后,形成套索,在套索上均匀设置六个连接块将三根钢丝绳连在一起,所述连接块呈圆柱形,端面均匀分布有三个通孔,三个钢丝绳通过六个滑块围成一圈后,形成的套索套在花瓶颈部。
17.设置圆柱形连接块连接三根钢丝绳使得三根钢丝绳形成一个套索,更方便的形成套索,不易变形,增加了套索的稳定性。
18.优选的,所述滑块内部为金属材质,外部为橡胶层。
19.滑块内部为金属材质,可增加钢丝绳落下时的质量,避免钢丝绳形成的套索上下摆动,外部为橡胶层,可避免对花瓶直接接触时,花瓶受到冲击容易破碎。
20.与现有技术相比,本发明的有益效果是:
21.刚烧制完成的花瓶表面温度较高,人为抓取易烫伤,并且效率较低,所以采用机械手抓取,设置传动机构和抓取机构方便滑轮上的钢丝绳运动,从而对花瓶的脖颈抓取,避免机械手直接抓取时施加力过大容易使花瓶破裂,从而提高了工作效率。
附图说明
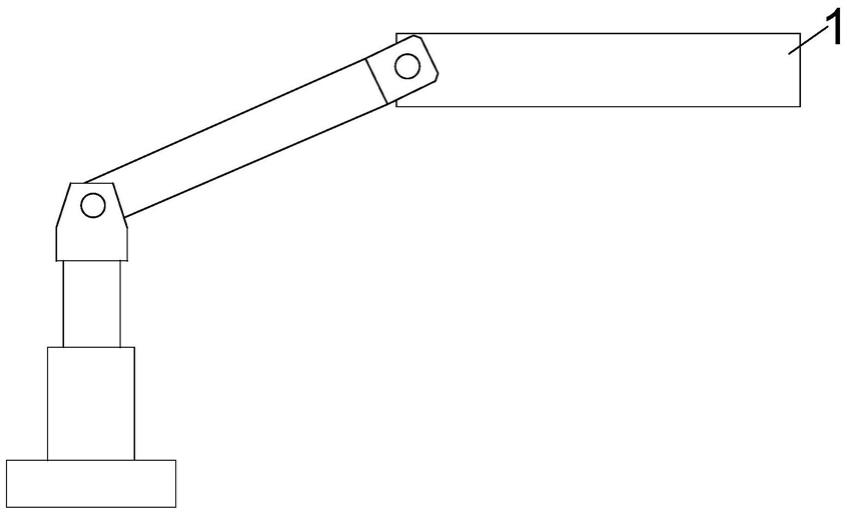
22.图1为本发明提出的一种工业机械手本体结构示意图;
23.图2为本发明提出的一种工业机械手主视结构视意图;
24.图3为本发明提出的一种工业机械手传动结构俯视机构示意图;
25.图4为本发明提出的一种工业机械手a处的剖视图;
26.图5为本发明提出的一种工业机械手b处的剖视图;
27.图6为本发明提出的一种工业机械手c处的剖视图。
28.图中:本体1、传动机构2、电机21、圆盘22、大齿轮23、从动轮24、抓取机构3、滑轮31、钢丝绳32、滑块33、连接块4。
具体实施方式
29.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
30.在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
31.请参阅图1~6,本发明实施例中,一种工业机械手包括本体1、传动机构2和抓取机
构3,传动机构2包括圆盘22、电机21、大齿轮23和从动轮24,传动机构2用来传递动力,抓取机构3包括滑轮31、钢丝绳32和滑块33,抓取机构3可用来对花瓶抓取。
32.通过设置传动机构2和抓取机构3方便滑轮31上的钢丝绳32运动,依靠花瓶自身的重力带动滑轮31滑动,使钢丝绳32形成的套索收缩,从而对花瓶的脖颈进行抓取,避免机械手直接抓取时施加力过大易使花瓶破裂。
33.具体的,本体1与圆盘22通过螺栓固定连接,圆盘22中心设置电机21,电机21输出端与大齿轮23固定连接,大齿轮23设在圆盘22上方外表面,大齿轮23周围啮合有三个相同大小的从动轮24且两两之间相隔120
°
,与从动轮24固定的转轴穿过圆盘22与滑轮31固定连接,从动轮24同样设在圆盘22上方外表面。
34.通过设置圆盘22连接本体1,使得抓取机构3随着本体1自由移动,设置电机21、大齿轮23和从动轮24用于对滑轮31传递力矩。
35.具体的,滑轮31上卷有钢丝绳32,钢丝绳32一端与滑轮31固定,另一端穿过滑块33的顶部从滑块33侧面出来,钢丝绳32围成一圈后末端与滑块33背面固定连接,滑轮31、钢丝绳32和滑块33均设置三个。
36.设置滑块33使得钢丝绳32围成圈,能够调节钢丝绳32从滑轮31伸出的距离,适用于对不同长度不同口径的花瓶的抓取,分别设置三个滑轮31、钢丝绳32和滑块33,更方便对花瓶进行抓取,增加了装置的稳定性。
37.具体的,滑块33与连接块4均为韧性材料。
38.设置滑块33与连接块4为韧性材料,防止钢丝绳32套在花瓶脖颈后,滑块33与连接块4接触花瓶时冲击力过大对花瓶造成破坏。
39.具体的,三个钢丝绳32通过三个滑块33围成一圈后,均匀设置六个连接块4将三根钢丝绳32连在一起,连接块4呈圆柱形,端面均匀分布有三个通孔,三个钢丝绳32通过六个滑块33围成一圈后,套在花瓶颈部。
40.设置圆柱形连接块4连接三根钢丝绳32使得三根钢丝绳32形成一个套索,套在花瓶颈部,方便抓取,更方便的形成套索,不易变形,增加了套索的稳定性。
41.优选的,所述滑块33内部为金属材质,外部为橡胶层。
42.滑块33内部为金属材质,可增加钢丝绳32落下时的质量,避免钢丝绳32形成的套索上下摆动,外部为橡胶层,可避免对花瓶直接接触时,花瓶受到冲击容易破碎。
43.工作原理:在本体1下方设置传动机构2和抓取机构3,打开电机21,带动大齿轮23传动从而带动三个从动轮24传动,从而带动三个滑轮31传动,三个滑轮31上分别卷有钢丝绳32,三根钢丝绳32的另一端分别穿过三个滑块33的顶部从滑块33侧面出来,钢丝绳32末端与滑块33背面固定连接围成一圈后,从而形成一个由三根钢丝绳32组成的套索,三根钢丝绳32由滑轮31控制伸出的长度,钢丝绳32能在滑块33上自由滑动,从而滑块33能够控制组成的套索的大小,适用于不同口径和不同长度的花瓶,同时也提高了抓取的稳定性,钢丝绳32组成的套索上设有六个连接块4,更方便的形成套索,不易变形,增加了套索的稳定性,滑块33与连接块4为韧性材料,避免滑块33与连接块4直接接触花瓶,冲击力过大对花瓶造成破坏,当套索套在花瓶颈部时,利用花瓶自身重力和钢丝绳32本身的弹性,从而可以提取花瓶进行移动,从而提高了工作效率,同时避免机械手直接抓取时施加力过大容易使花瓶破裂。
44.以上所述,仅为本发明较佳的具体实施方便,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。