技术特征:
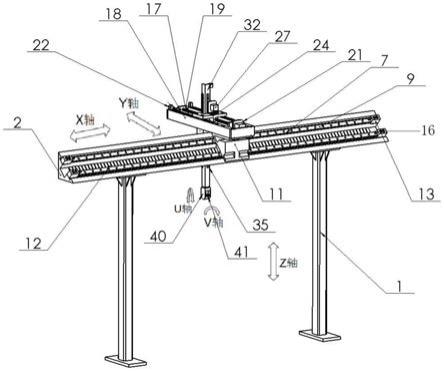
1.一种基于斜面支撑的直驱式高速大行程桁架机器人,其特性在于:其包括立柱、一x轴斜面支撑横梁、一x轴运动模组、一y轴运动模组、一z轴运动模组、一腕部旋转机构以及一在线位置检测反馈系统;所述x轴斜面支撑横梁一侧的底部设置有所述立柱,该x轴斜面支撑横梁包括有一倾斜面,形成三角形或梯形的x轴斜面支撑横梁结构,所述的倾斜面为由上至下向外倾斜;所述x轴运动模组安装在所述倾斜面上,所述y轴运动模组安装在所述x轴运动模组上,通过x轴运动模组的驱动在x轴方向往复运动,所述的z轴运动模组安装在y轴运动模组上,通过y轴运动模组的驱动在y轴方向往复运动,所述z轴运动模组驱动在z轴方向往复运动;所述腕部旋转机构包含u轴旋转组件和z轴旋转组件,分别绕x轴与绕y轴旋转运动,实现机器人末端的位姿控制;所述在线位置检测反馈系统包含一x轴光栅尺以及一光栅尺读数头,所述x轴光栅尺安装在所述x轴斜面支撑横梁上,所述光栅尺读数头安装在所述x轴运动模组上,所述x轴光栅尺与所述光栅尺读数头配合实现对所述x轴运动模组在x轴方向运动位置的在线检测与反馈控制。2.如权利要求1所述的基于斜面支撑的直驱式高速大行程桁架机器人,其特征在于:所述x轴运动模组包含一x轴滑台、一x轴直线导轨副以及一x轴直线电机,所述x轴直线导轨副安装在所述x轴斜面支撑横梁上,所述x轴滑台安装在所述x轴直线导轨副上,所述x轴直线电机包含x轴直线电机定子以及x轴直线电机动子,所述x轴直线电机定子安装在所述x轴斜面支撑横梁上,所述x轴直线电机动子安装在所述x轴滑台上,该x轴直线电机实现所述x轴滑台沿x轴方向往复运动。3.如权利要求2所述的基于斜面支撑的直驱式高速大行程桁架机器人,其特征在于:所述x轴直线导轨副包含两根x轴直线导轨和4个x轴滑块,两根所述x轴直线导轨上各安装有2个所述x轴滑块,其中,两根所述x轴直线导轨安装在所述x轴斜面支撑横梁上,所述x轴滑台安装在4个所述x轴滑块上。4.如权利要求2所述的基于斜面支撑的直驱式高速大行程桁架机器人,其特征在于:所述y轴运动模组包含一y轴基座、一y轴直线导轨副、一y轴滑台、一y轴伺服电机以及一y轴滚珠丝杆,所所述y轴基座为一框型基座结构,其固定安装在所述x轴滑台上,所述y轴直线导轨副安装在所述y轴基座上,所述y轴滑台安装在所述y轴直线导轨副上,所述y轴伺服电机安装在y轴基座上,其驱动端连接所述y轴滑台,所述y轴滚珠丝杆设置在所述y轴基座的长度方向上,该y轴滚珠丝杆滑动连接所述y轴滑台。5.如权利要求4所述的基于斜面支撑的直驱式高速大行程桁架机器人,其特征在于:所述y轴直线导轨副包含4根y轴直线导轨和8个y轴滑块,每根y轴直线导轨与2个y轴滑块组成1个y轴移动副,所述y轴基座左右两边工字梁的相对内侧分别布置安装两个y轴移动副,所述y轴滑台安装在8个所述y轴滑块上。6.如权利要求4所述的基于斜面支撑的直驱式高速大行程桁架机器人,其特征在于:所述z轴运动模组包含一z轴直线导轨副、一z轴竖梁、一z轴伺服电机、一减速器以及一z轴齿轮齿条机构,所述z轴竖梁通过所述z轴直线导轨副实现与所述y轴基座连接,所述z轴伺服电机安装在所述y轴滑台上,所述减速器的输入端与所述z轴伺服电机之间通过皮带传动,所述减速器的输出端安装有所述z轴齿轮齿条机构的齿轮,该z轴齿轮齿条机构的齿轮与安
装在所述z轴竖梁的z轴齿轮齿条机构的齿条配合,实现所述z轴竖梁沿z轴方向进行上下运动。7.如权利要求6所述的基于斜面支撑的直驱式高速大行程桁架机器人,其特征在于:所述z轴直线导轨副包含1根z轴直线导轨和2个z轴滑块,所述z轴直线导轨上安装有2个所述z轴滑块,其中,所述z轴直线导轨安装在所述z轴竖梁上,2个所述z轴滑块的另一端与所述y轴滑台连接。8.如权利要求6所述的基于斜面支撑的直驱式高速大行程桁架机器人,其特征在于:所述z轴竖梁的末端安装有一末端连接板,所述腕部旋转机构安装在所述末端连接板上。9.如权利要求6所述的基于斜面支撑的直驱式高速大行程桁架机器人,其特征在于:所述x轴斜面支撑横梁的两端以及所述y轴基座两端均安装有2个弹性防撞限位块和2个极限位置接近开关;所述弹性防撞限位块用以防止所述x轴滑台滑出x轴直线导轨,以及防止所述y轴滑台滑出所述y轴直线导轨;所述极限位置接近开关用以限定x轴方向的正常运动行程范围,以及限定y轴方向的正常运动行程范围。10.如权利要求7所述的基于斜面支撑的直驱式高速大行程桁架机器人,其特征在于:所述z轴竖梁的两端分别安装有2个硬限位块和z轴极限位置接近开关,所述y轴滑台上安装一个两端带弹性防撞限位块,所述两端带弹性防撞限位块与2个所述硬限位块配合,防止所述z轴竖梁滑出所述z轴直线导轨,所述z轴极限位置接近开关用以限定z轴方向的正常运动行程范围。
技术总结
本发明提供一种基于斜面支撑的直驱式高速大行程桁架机器人,属于机器人技术领域,其包括立柱、X轴斜面支撑横梁、X轴运动模组、Y轴运动模组、Z轴运动模组、腕部旋转机构和在线位置检测反馈系统。X轴斜面支撑横梁的设置使得运动部件的重心后移,保证机器人运动部件的重心分布在X轴斜面支撑横梁上,从而提高了机器人的动静刚度,降低机器人部件沿Y轴方向前移产生的倾覆力矩的影响,减少Y轴运动模组的Y轴滑台前移及Z轴运动模组的Z轴竖梁向下运动时的变形。腕部旋转机构的结构实现了桁架机器人的直线定位控制与机器人末端的位姿协调控制,使得改机器人可以适合各种工作岗位。在线位置检测反馈系统使得该机器人的定位精度高,操作更为精准。更为精准。更为精准。
技术研发人员:马平 赵宏达
受保护的技术使用者:广东工业大学
技术研发日:2021.09.17
技术公布日:2021/12/3
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。