技术特征:
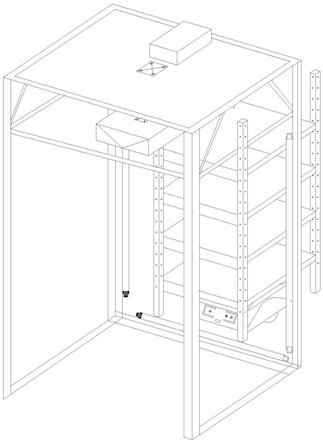
1.一种智能投影辅助拣选工作站,其特征在于:包括激光雷达(1)、超短焦投影机(2)、工控机(3)、支架(5)和货架(6),所述激光雷达(1)与超短焦投影机(2)固定在支架(5)的顶壁上;所述工控机(3)设置在支架(5)的顶面上,工控机(3)与激光雷达(1)与超短焦投影机(2)组成拣选系统;所述货架(6)通过agv小车(7)上的装配组件(8)移动至支架(5)拣选面,拣选系统对货架(6)投影以及提醒。2.根据权利要求1所述的一种智能投影辅助拣选工作站,其特征在于,所述工控机(3)通过hdmi线或者vga线与超短焦投影机(2)相连,工控机(3)在接收到agv小车(7)的拣选指令后,投影指引的区域信息发送给超短焦投影机(2),超短焦投影机(2)接收到工控机(3)的指令后快速以闪耀的方式在货架(6)形成区域投影,提醒拣选人员进行货物拣选;所述激光雷达(1)与工控机(3)通过网线或其它数据线进行连接,激光雷达(1)实时扫射拣选人员的拣选手势的位置,工控机(3)通过逻辑运算和大数据分析,判断拣选人员的行为是否正确,并以视觉和语音方式来提醒拣选工作人员。3.根据权利要求2所述的一种智能投影辅助拣选工作站,其特征在于,所述超短焦投影机(2)安装在距离支架(5)正前方区域0.5m~0.8m,光源与支架(5)垂直投射,激光雷达(1)安装在支架(5)正前面区域的正上方或者左右两角,与支架(5)正前面区域垂直,通过高频率扫射支架(5)正前面区域是否存在障碍物,并将障碍物的区域坐标实时伤发送给工控机(3)。4.根据权利要求3所述的一种智能投影辅助拣选工作站,其特征在于,支架(5)正前面区域被超短焦投影机(2)设置成多个虚拟区域,虚拟区域投影在入站的agv小车(7)上的货架(6)重叠,通过超短焦投影机(2)将需要拣选的信息以数字、文字和图片的形式投射到货架(6)的数字显示确认区上;所述虚拟区域划分与入站的agv小车(7)上的货架(6)规格一致,货架(6)是5层4列一共20个库位的规格,虚拟区域自动划分5层4列一共20个虚拟区域,并经工控机3上传到后端进行保存。5.根据权利要求4所述的一种智能投影辅助拣选工作站,其特征在于,工控机(3)需要与agv小车(7)和激光雷达(1)实时坐标进行运算和校验,工控机(3)和激光雷达(1)进行的通信协议进行规范和统一,通信协议标准系统为pps
‑
sdk。6.根据权利要求5所述的一种智能投影辅助拣选工作站,其特征在于,装配组件(8)包括车板(81)、升降组件(82)和伸缩组件(83),升降组件(82)安装在车板(81)上,伸缩组件(83)与升降组件(82)连接。7.根据权利要求6所述的一种智能投影辅助拣选工作站,其特征在于,升降组件(82)包括滑轨(821)、电机(822)、丝杆(823)、滑槽(824)和齿条(825),滑槽(824)对称沿车板(81)的高度方向加工,齿条(825)固定在滑槽(824)的内壁上;所述电机(822)安装在车板(81)上,丝杆(823)置于齿条(825)另一侧的滑槽(824)内,丝杆(823)上啮合横板(826),横板(826)上连接的齿轮(9)与齿条(825)啮合,横板(826)上连接有升降平台(827),升降平台(827)两侧通过滑块接入滑轨(821)上。8.根据权利要求7所述的一种智能投影辅助拣选工作站,其特征在于,伸缩组件(83)包
括蜗杆(831)、涡轮(832)和抬身杆(833),蜗杆(831)的一端贯穿齿轮(9)的圆心,蜗杆(831)的另一端穿入升降平台(827)内与涡轮(832)啮合,抬身杆(833)贯穿升降平台(827),抬身杆(833)上加工有与涡轮(832)啮合的齿槽(10)。9.根据权利要求8所述的一种智能投影辅助拣选工作站,其特征在于,agv小车(7)的顶部连接有气动伸缩头,气动伸缩头在agv小车(7)上伸缩,用于顶起货架(6)移动或者货架(6)下降放置,光栅分布在支架(5)的两侧,光栅用于感应操作者的手部是否在虚拟区域内。10.一种根据权利要求9所述的智能投影辅助拣选工作站的拣选方法,其特征在于,包括以下步骤:s1:agv小车(7)移动至货架(6)的前方,电机(822)接收信号工作,电机(822)驱动丝杆(823)旋转带动横板(826)下降;s2:横板(826)下降则齿轮(9)沿着齿条(825)旋转,齿轮(9)将旋转的动力传递至蜗杆(831),通过蜗杆(831)带动涡轮(832)旋转,涡轮(832)又与抬身杆(833)内齿槽(10)啮合,则抬身杆(833)沿着升降平台(827)内伸长;s3:抬身杆(833)移动至货架(6)的下方,驱动装配组件(8)带动货架(6)上升移动至支架(5)的正前方的虚拟区域;s4:装配组件(8)驱动抬身杆(833)下降的同时并伸长,将货架(6)放置到支架(5)的虚拟区域上,通过调整超短焦投影机(2)的投影区域与货架(6)的规格相同,并且每个货架(6)的储物空间内均与划分的虚拟区域一一对应;s5:超短焦投影机(2)将货架(6)上投影的虚拟区域划分为拣选区和数字显示确认区,激光雷达(2)通过捕捉拣选人员的手势所在的位置,在无成像投影区域进行视觉和语音报警,在正确的虚拟区域拣选区,变成绿色成像投影,提示正确拣选货物,在正确的虚拟区域的信息指示展示条上的数字显示确认区完成拍灭,信息指示展示条通过工控机(3)上传数据发送到后端进行逻辑运算。
技术总结
本发明公开了一种智能投影辅助拣选工作站及其拣选方法,包括激光雷达、超短焦投影机、工控机、支架和货架,所述激光雷达与超短焦投影机固定在支架的顶壁上,所述工控机设置在支架的顶面上,工控机与激光雷达与超短焦投影机组成拣选系统;采用单个动力输出,提供升降以及伸缩的动力,并且本发明将升降和伸缩结合在一起,抬身杆升降的同时完成抬身杆伸长或者缩短,能够有效的将货架驱动其下降时抬身杆的伸长,方便插入货架下方,抬身杆上升时,货架上升移动至AGV小车上方,减少其占地面积,实现快速、高效、具有防错功能的智慧性AGV货到人拣选业务。较少AGV小车以在工作站的停留时间,提供整个物流仓库的拣选效率。整个物流仓库的拣选效率。整个物流仓库的拣选效率。
技术研发人员:陈定桔 莫宏智 陈定钰 林天升
受保护的技术使用者:广州丰沃信息科技有限公司
技术研发日:2021.09.14
技术公布日:2021/12/2
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。