1.本发明涉及机器人抓取技术,特别是涉及一种具备力和触觉传感功能的柔性机械手及传感器。
背景技术:
2.视觉受限环境下的感知、抓取与操作一直是机器人领域的难点,却在特种机器人领域有极大的应用前景。在泥浆、石油等环境下,完全无法使用摄像机、激光雷达等光学设备条件下,触觉成为唯一的精确环境感知方式。在深水、洞穴、管道等环境下,光学设备视场受限且被浑浊悬浮物、灰尘等干扰,也难以最大限度发挥作用,触觉是最可靠的环境感知方式。在机械手抓取时,力和触觉传感的反馈为抓取行为的闭环控制提供了必要信息。
3.传统触觉传感器依靠光纤光栅、阵列柔性压阻或电容传感器等,价格昂贵易损坏,较难在各种工况下使用,对于形变较大的形状传感效果也不好。
4.一种触觉感知方案,平面的硅胶膜上有黑色的阵列点,硅胶膜周边有三种不同颜色led灯,当没有接触物体时,三种灯颜色混合为白色,当接触物体时,由于薄膜变形,向内突起的薄膜被相应方向led灯照射,因此颜色的改变被后面的相机成像,通过分析颜色能得到受力的变化,另外黑色的斑点位置的变化也被记录,通过分析斑点位置变化可得到接触物的形状。因为需要周边三种led灯掠射过硅胶膜,当无物体接触时不能出现光照不均匀,另外上面的标记黑点也要保证无接触时呈均匀阵列,因此要求硅胶膜必须完全平整,因此硅胶膜较厚硬度较大尺寸也较小,仅能对小物体或纹理进行检测。
5.另一种触觉机械手方案,采用颗粒聚集夹爪,夹爪由软体的外包覆球和内部的小颗粒组成,当夹持物体时,外包覆球形成物体表面的形状,这时抽干内部空气,内部小颗粒聚集后形状固定。通过外部激光扫描外包覆球的外形可以得到所抓取物体的形状。由于需要抓取后再取下物体,通过外部激光扫描获取物体表面信息,实际中并不实用,且检测周期较长,另外激光扫描成本较高。
6.需要说明的是,在上述背景技术部分公开的信息仅用于对本技术的背景的理解,因此可以包括不构成对本领域普通技术人员已知的现有技术的信息。
技术实现要素:
7.本发明的主要目的在于克服上述背景技术的缺陷,提供一种具备力和触觉传感功能的柔性机械手及传感器。
8.为实现上述目的,本发明采用以下技术方案:
9.一种具备力和触觉传感功能的柔性机械手,包括弹性软囊和摄像机,所述弹性软囊内充有透明流体介质,所述弹性软囊包括层叠设置的透明弹性薄膜和力致变色膜,当所述弹性软囊接触到物体时,所述透明弹性薄膜和所述力致变色膜发生变形,所述力致变色膜在应力作用下产生接触位置的颜色变化,所述摄像机透过所述弹性软囊和所述透明流体介质获取在相应位置产生颜色变化的图像,其中,根据所述颜色变化确定接触位置的应力,
进而确定所述物体的形状,所述柔性机械手根据所确定的物体形状进行物体抓取。
10.所述弹性软囊包括内、中、外三层透明弹性薄膜、位于内层与中层透明薄膜之间的内层荧光膜、位于外层与中层透明薄膜之间的外层荧光膜,所述外层荧光膜的荧光材料较所述内层荧光膜的荧光材料更多,且二者颜色不同,当所述弹性软囊接触到物体时,所述透明弹性薄膜和内、外层荧光膜发生变形,所述内层荧光膜在接触位置的应力作用下产生细小裂纹,所述外层荧光膜的光透过所述细小裂纹并带来接触位置的颜色变化。
11.所述内层荧光膜与所述外层荧光膜的荧光材料的颜色形成互补色,优选地,所述内层荧光膜的荧光材料为橙色,所述外层荧光膜的荧光材料为黄绿色。
12.所述内层荧光膜的荧光材料是所述透明弹性薄膜在松弛状态下涂覆形成的,所述外层荧光膜的荧光材料是所述透明弹性薄膜在膨胀状态下涂覆形成的;优选地,所述内层荧光膜还涂覆有透明光油,所述外层荧光膜上还涂覆有透明硅胶。
13.所述弹性软囊内充有固体颗粒与液体的透明混合液,抓取物体时将所述弹性软囊内的液体抽出,产生颗粒聚集效应,使所述固体颗粒阻塞聚团,所述弹性软囊根据所述物体的表面形状自适应地改变形状,并通过所述固体颗粒的阻塞聚团作用夹紧物体,实现物体抓取。
14.所述固体颗粒与液体混合成密度与水相近的悬浮液,密度为0.9
‑
1.1g/cm3,优选为1.03g/cm3。
15.所述固体颗粒为聚十二内酰胺材料,所述液体为nacl溶液或糖水溶液;优选地,所述nacl溶液按重量份含0.9份nacl与100份水;优选地,所述固液混合液由50到80份所述固体颗粒与100份的所述nacl溶液混合而成。
16.还包括用于进行抓取的机械夹爪,所述透明流体介质为透明气体或透明液体。
17.所述弹性软囊作为机械手手掌设置在所述柔性机械手的中央,所述机械夹爪设置在所述弹性软囊的侧边。
18.一种具备力和触觉传感功能的传感器,包括弹性软囊和摄像机,所述弹性软囊内充有透明流体介质,所述弹性软囊包括层叠设置的透明弹性薄膜和力致变色膜,当所述弹性软囊接触到物体时,所述透明弹性薄膜和所述力致变色膜发生变形,所述力致变色膜在应力作用下产生接触位置的颜色变化,所述摄像机透过所述弹性软囊和所述透明流体介质获取在相应位置产生颜色变化的图像,其中,根据所述颜色变化确定接触位置的应力,进而确定所述物体的形状,所述柔性机械手根据所确定的物体形状进行物体抓取。
19.本发明具有如下有益效果:
20.本发明提供一种基于触觉传感具备形状感知功能的柔性机械手,其传感器包括充有透明流体介质的弹性软囊,弹性软囊上包括层叠设置的透明弹性薄膜和力致变色膜,以力致变色膜为传感层,当弹性软囊接触到物体,自适应地根据物体的表面形状改变软囊的形状,同时力致变色膜响应于应力改变接触位置的颜色,根据摄像机捕捉到的颜色变化,判断接触位置的应力,进而判断接触物体的形状,由此,该柔性机械手实现了力与物体形状的感知,其适合在大部分视觉受限工况下使用,适合对复杂形体或环境进行检测,同时成本低廉易于生产。
21.本发明为机械手提供了一种力觉、触觉反馈机制,尤其可以帮助机器人在视觉受限情况下(如无光、泥浆、烟雾等)建立对环境、被操作物的感知,帮助机械手在抓取时调整
姿态或抓取力。
22.本发明相比其它力/触觉传感器结构简单、成本低廉、易于制造。
23.本发明的原始信号为连续信号,而非其它传感器的离散信号,本发明的方案可以通过算法、标定等方法提高精度。
24.在一种优选的方案中,所述弹性软囊内充有固体颗粒与液体的透明混合液,利用液体抽取时产生的颗粒聚集阻塞效应,弹性软囊在进行物体形状感知的同时也能够充当夹爪。基于固液混合物颗粒阻塞的柔性夹爪,通过改变液体含量使夹爪刚度变化来达到柔性夹取的目的,特别适合对形状与表面特性较复杂的物品的抓取。由于此方案不需要另外的机械夹爪,也减小了柔性机械手的尺寸和复杂度。
附图说明
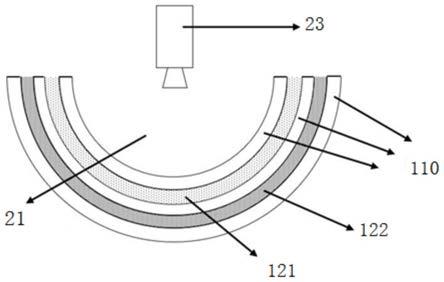
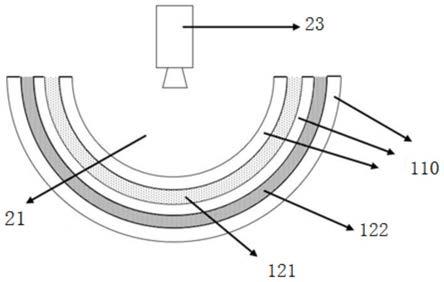
25.图1为本发明一种实施例中的基于力致变色薄膜结构的传感器结构示意图。
26.图2为本发明一种实施例中的基于力致变色薄膜结构的传感器工作原理图。
27.图3为本发明一种实施例的具备力和触觉传感功能的柔性机械手。
28.图4为本发明另一种实施例的具备力和触觉传感功能的柔性机械手。
29.图5为本发明实施例基于固液混合物颗粒阻塞的变刚度柔性夹爪的固液混合物的原理示意图。
30.图6a和图6b为本发明实施例基于固液混合物颗粒阻塞的变刚度柔性夹爪的抽取液体过程的原理示意图。
31.图7a和图7b为本发明一种实施例基于固液混合物颗粒阻塞的单囊膜夹爪结构示意图。
32.图8a和图8b为本发明另一种实施例基于固液混合物颗粒阻塞的多弹性膜囊夹爪结构示意图。
具体实施方式
33.以下对本发明的实施方式做详细说明。应该强调的是,下述说明仅仅是示例性的,而不是为了限制本发明的范围及其应用。
34.需要说明的是,当元件被称为“固定于”或“设置于”另一个元件,它可以直接在另一个元件上或者间接在该另一个元件上。当一个元件被称为是“连接于”另一个元件,它可以是直接连接到另一个元件或间接连接至该另一个元件上。另外,连接既可以是用于固定作用也可以是用于耦合或连通作用。
35.需要理解的是,术语“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明实施例和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
36.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多该特征。在本发明实施例的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
37.参阅图1至图2,本发明实施例提供一种具备力和触觉传感功能的柔性机械手,包括弹性软囊1和摄像机23,所述弹性软囊1内充有透明流体介质21,所述弹性软囊1包括层叠设置的透明弹性薄膜110和力致变色膜120,当所述弹性软囊1接触到物体时,所述透明弹性薄膜110和所述力致变色膜120发生变形,所述力致变色膜120在应力作用下产生接触位置的颜色变化,所述摄像机23透过所述弹性软囊1和所述透明流体介质21获取在相应位置产生颜色变化的图像,其中,根据所述颜色变化确定接触位置的应力,进而确定所述物体的形状,所述柔性机械手根据所确定的物体形状进行物体抓取
38.参阅图1至图2,在优选的实施例中,所述弹性软囊1包括内、中、外三层透明弹性薄膜110、位于内层与中层透明薄膜之间的内层荧光膜121、位于外层与中层透明薄膜之间的外层荧光膜122,所述外层荧光膜122的荧光材料较所述内层荧光膜121的荧光材料更多,且二者颜色不同,当所述弹性软囊1接触到物体时,所述透明弹性薄膜110和内、外层荧光膜122发生变形,所述内层荧光膜121在接触位置的应力作用下产生细小裂纹,所述外层荧光膜122的光透过所述细小裂纹并带来接触位置的颜色变化。
39.在更优选的实施例中,所述内层荧光膜121与所述外层荧光膜122的荧光材料的颜色形成互补色。在一个特别优选的实施例中,所述内层荧光膜121的荧光材料为橙色,所述外层荧光膜122的荧光材料为黄绿色。
40.在更优选的实施例中,所述内层荧光膜121的荧光材料是所述透明弹性薄膜110在松弛状态下涂覆形成的,所述外层荧光膜122的荧光材料是所述透明弹性薄膜110在膨胀状态下涂覆形成的。
41.在更优选的实施例中,所述内层荧光膜121还涂覆有透明光油,所述外层荧光膜122上还涂覆有透明硅胶进行保护。
42.参阅图3,在一种实施例中,柔性机械手还包括用于进行抓取的机械夹爪28,所述弹性软囊1中的所述透明流体介质为透明气体或透明液体2'。
43.在优选的实施例中,所述弹性软囊1作为机械手手掌设置在所述柔性机械手的中央,所述机械夹爪28设置在所述弹性软囊1的侧边,所述摄像头23固定在所述弹性软囊1的上方。
44.参阅图4至图8b,在一种优选的实施例中,所述弹性软囊1内充有固体颗粒与液体的透明的混合液2,抓取物体时将所述弹性软囊1内的液体抽出,产生颗粒聚集效应,使所述固体颗粒阻塞聚团,所述弹性软囊1根据所述物体3的表面形状自适应地改变形状,并通过所述固体颗粒的阻塞聚团作用夹紧物体3,实现物体抓取。本实施例的所述弹性软囊1在进行物体形状感知的同时也能够充当夹爪。
45.在优选的实施例中,所述固体颗粒与液体混合成密度与水相近的悬浮液,密度为0.9
‑
1.1g/cm3,优选为1.03g/cm3。
46.在更优选的实施例中,所述固体颗粒为聚十二内酰胺材料,所述液体为nacl溶液或糖水溶液;优选地,所述nacl溶液按重量份含0.9份nacl与100份水;优选地,所述固液混合液由50到80份所述固体颗粒与100份的所述nacl溶液混合而成。
47.参阅图1至图2,本发明实施例还提供一种具备力和触觉传感功能的的传感器,包括弹性软囊1和摄像机23,所述弹性软囊1包括内中外三层透明弹性薄膜,所述弹性软囊1充有透明流体介质21,,由此所带来的的变化由所述摄像机23拍摄捕捉,其中,根据的变化确
定,进而确定所述物体的形状。
48.以下进一步描述本发明具体实施例。
49.具备力和触觉传感功能的传感器
50.如图1和图2所示,一个具体实施例中,具备力和触觉传感功能的传感器包括三层全透明高弹性薄膜(材料不做要求)叠加,每两层之间混有不同颜色(对比色)荧光涂料形成荧光膜,其中内侧荧光膜涂料较少,外侧荧光膜涂料较多,当受到应力时,内侧荧光膜形成细小裂缝,外侧涂料的荧光通过裂缝透过,形成颜色变化。
51.图1示出了力致变色膜结构及与摄像机的位置关系,图为纵向剖面图,膜为半球形结构,内部填充气体或液体或其它透明介质,使膜鼓起并保持一定弹性。透明薄膜分别在外、中、内层。内层与中层透明薄膜之间灌注或涂抹荧光材料(以橙色为佳,因其与外层形成互补色且发光效果较好),涂抹时保证膜在松弛状态,均匀涂抹一层后喷涂透明光油(如模型保护漆),该荧光材料形成内层荧光膜。外层与中层之间灌注或涂抹荧光材料(以黄绿色为佳,因其发光性能最好),涂抹时保证膜在膨胀状态(比如充气),均匀涂抹一层后喷涂透明硅胶保护,该荧光材料形成外层荧光膜,并且外层荧光膜的荧光材料较内层荧光膜荧光材料更多。
52.未接触物体时,保持整个膜结构在均匀受力但未过分拉伸状态,此时内层荧光膜完整,并遮挡外层荧光膜的光,摄像头看到仅为内层荧光膜发光。当接触物体时,内层荧光材料的透明光油没有弹性,在应力变化下形成细小裂纹,外层荧光膜的光透过细小裂纹进入(外层荧光膜发光效果最好大于内层荧光膜发光效果),摄像头下受到应力的位置颜色发生改变,应力越大内层荧光膜的小裂纹越大,透过的光越多,颜色改变越大。颜色与应力/形状的关系可以通过标定、机器学习的训练等完成。
53.图2示出变色薄膜原理,其中放大了膜的比例,实际五层膜叠加的厚度可以较小,如毫米量级。
54.柔性机械手结构
55.图3示出本发明一种实施例的具备力和触觉传感功能的柔性机械手。该实施例方案为变色薄膜内无固体填充,弹性软囊1为机械手手掌,仅提供触觉功能,感知被抓取物体的大小形状,然后由侧边的机械夹爪28进行抓取。该机械夹爪28可以为刚性,也可以为柔性。
56.图4示出本发明另一种实施例的具备力和触觉传感功能的柔性机械手。该实施例方案的机械手结构利用弹性软囊1内的固体颗粒聚集效应进行抓取。
57.在后一种实施例中,弹性软囊1提供基于固液混合物颗粒阻塞的变刚度柔性夹爪结构,图5至图6b示出了弹性软囊1的工作原理。所述弹性软囊1内充有固体颗粒201与液体202的混合液2,夹取物体3时将所述弹性软囊1内的液体202抽出,使所述固体颗粒201阻塞聚团,所述弹性软囊1根据所述物体的表面形状自适应地改变形状,并通过所述固体颗粒201的阻塞聚团作用夹紧所述物体3。如图6b所示,固体颗粒201的阻塞聚团后在物体3的表面上自适应地改变形状,形成适于夹紧物体表面的形状4。
58.本发明中,弹性软囊1提供的变刚度柔性夹爪结构利用固液混合物的自适应变形进行物体的夹取。颗粒的阻塞,是指大量颗粒在受外力作用紧密排列下形成较大区域颗粒团,在颗粒团中的颗粒彼此受力平衡,受到一定外力时能保持彼此位置相对不变。颗粒在松
散状态下变换到紧密排列状态下宏观呈现类似液态到固态的相变过程。如图5所示,固体颗粒与液体混合,固体颗粒呈较松散状态,固体颗粒与液体的密度一致,这样在一定空间内混合物表现出液体的流动性,可根据接触物变化形状。图5中物体3表示为一栅格形状,用以代表较为复杂的接触物表面。图6a至图6b示出了基于固液混合物颗粒阻塞的变刚度柔性夹爪的抽取液体过程。
59.颗粒液体混合液
60.如下实施例提供适用于液体驱动颗粒阻塞原理夹取物体的固液混合物。
61.在一些实施例中,颗粒混合液的固体颗粒密度与液体密度一致,同时与水密度相近,这种混合液可以将固体颗粒悬浮于液体中,达到很好的流动性,同时由于其密度与水相近,在水中表现出很好的柔性,能够在夹取物体时更好地改变形状适应物体表面结构。
62.一个优选的实施例中,颗粒采用尼龙12(pa12,聚十二内酰胺),该材料适合本发明的优点是密度为不大于1.03g/cm3,为常用工程塑料中密度与水最接近的材料,同时其也是常用工程塑料中吸水率最低的材料(0.25%),非常适合作为固液混合液的颗粒。液体采用盐(nacl)溶液,具体配方为按重量0.9份盐,与100份水混合,其密度为1.03g/cm3。将50到80份固体颗粒与100份盐溶液混合成为固液混合液。
63.固体颗粒也可采用其它材料。
64.液体也可采用其它溶液,例如糖水溶液(可以配合更高密度的固体颗粒),与尼龙12形成固液混合液时可采用8份蔗糖混合100份水。
65.实际配制时,可通过理论计算溶液浓度,也可以将颗粒放入饱和溶液中,缓慢加水搅拌直至颗粒悬浮,或将颗粒放入水中,缓慢加溶剂使其完全溶解,直至颗粒悬浮。
66.上述配方均可在室温(20
°
左右)有效。
67.固体与液体的配比也可根据实际应用场景变化,上述给出的配比综合了流动性和液体抽走后固体颗粒团较小体积的变化。
68.柔性夹爪的不同实施例
69.参阅图7a至图7b,在一个优选的实施例中,所述变刚度柔性夹爪包括单个弹性软囊1、底座5、管道6和过滤网7,所述底座5上具有通孔,所述弹性软囊1设置在所述底座5上并通过所述通孔与所述管道6连通,所述管道6连接水泵(未图示),所述弹性软囊1的入口设置有过滤网7,用于在抽取所述液体时过滤所述固体颗粒;优选地,所述弹性软囊1为半球形;在抓取物体时使所述弹性软囊1压紧物体3,并通过所述管道6将所述弹性软囊1中的液体抽出,所述弹性软囊1内的固体颗粒聚集夹紧所述物体3。
70.参阅图8a至图8b,在另一优选的实施例中,所述变刚度柔性夹爪包括多个弹性软囊1,每个弹性软囊1构成一个夹爪手指,所述弹性软囊1包括注液囊101和抽液囊102,所述注液囊101位于所述抽液囊102的与夹取方向相反的一侧,所述注液囊101连接注液管103,用于注入液体,所述抽液囊102中充有所述固体颗粒与液体的混合液,所述抽液囊102连接抽液管104,并具有用于在抽液时过滤颗粒的过滤结构,当需要夹紧物体时,通过所述注液管103向所述注液囊101内注入液体,使所述注液囊101膨胀,通过所述抽液管104将所述抽液囊102中的液体抽出,使所述抽液囊102收缩,所述夹爪手指向被夹物体方向弯曲,所述注液囊101向所述抽液囊102施加压力,使得接触物体表面的所述抽液囊102变形为物体表面的形状,夹紧物体。
71.参阅图8a至图8b,在更优选的实施例中,所述抽液管104贯穿至所述抽液囊102内,所述抽液管104的管壁为可过滤颗粒的多孔结构,所述抽液管104为径向刚性,不会在抽取液体时被压缩。
72.参阅图8a至图8b,在更优选的实施例中,所述变刚度柔性夹爪还包括夹爪手掌8,所述夹爪手掌8构成为固定所述夹爪手指的根部、以及所述注液管103和所述抽液管104的支架。
73.在不同的实施例中,所述注液囊101与所述抽液囊102中的液体为不同的液体或同一种液体。
74.夹取时,可以所述注液囊101先注入液体,之后所述抽液囊102再抽取液体,也可以两者同时进行。
75.本实施例的柔性夹爪,尤其是液体驱动的柔性夹爪,特别适合在水下环境中使用对大小、形状、表面特性复杂的物体进行抓取。本发明柔性夹爪的柔性可变性能力,能够自适应改变自身形状符合被夹物体,并自适应分配夹持力,达到具有传感器和驱动器的复杂闭环控制机械夹爪同样的效果。本发明的柔性夹爪可用低成本的材料,制作简单。
76.本发明为机械手提供了一种力觉、触觉反馈机制,可以帮助机械手在抓取时调整姿态或抓取力。作为一种触觉感受器,其可以帮助机器人在视觉受限情况下(如无光、泥浆、烟雾等)建立对环境、被操作物的感知。本发明相比其它力/触觉传感器结构简单、成本低廉、易于制造。本发明的原始信号为连续信号,而非其它传感器的离散信号,本发明的方案可以通过算法、标定等方法提高精度。
77.本发明的背景部分可以包含关于本发明的问题或环境的背景信息,而不一定是描述现有技术。因此,在背景技术部分中包含的内容并不是申请人对现有技术的承认。
78.以上内容是结合具体/优选的实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,其还可以对这些已描述的实施方式做出若干替代或变型,而这些替代或变型方式都应当视为属于本发明的保护范围。在本说明书的描述中,参考术语“一种实施例”、“一些实施例”、“优选实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。尽管已经详细描述了本发明的实施例及其优点,但应当理解,在不脱离专利申请的保护范围的情况下,可以在本文中进行各种改变、替换和变更。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。