技术特征:
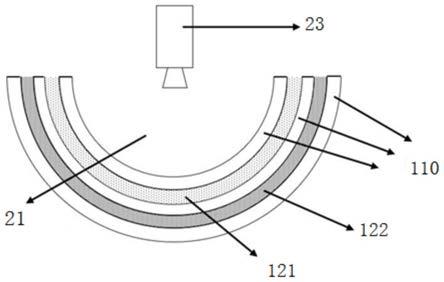
1.一种具备力和触觉传感功能的柔性机械手,其特征在于,包括弹性软囊和摄像机,所述弹性软囊内充有透明流体介质,所述弹性软囊包括层叠设置的透明弹性薄膜和力致变色膜,当所述弹性软囊接触到物体时,所述透明弹性薄膜和所述力致变色膜发生变形,所述力致变色膜在应力作用下产生接触位置的颜色变化,所述摄像机透过所述弹性软囊和所述透明流体介质获取在相应位置产生颜色变化的图像,其中,根据所述颜色变化确定接触位置的应力,进而确定所述物体的形状,所述柔性机械手根据所确定的物体形状进行物体抓取。2.如权利要求1所述的柔性机械手,其特征在于,所述弹性软囊包括内、中、外三层透明弹性薄膜、位于内层与中层透明薄膜之间的内层荧光膜、位于外层与中层透明薄膜之间的外层荧光膜,所述外层荧光膜的荧光材料较所述内层荧光膜的荧光材料更多,且二者颜色不同,当所述弹性软囊接触到物体时,所述透明弹性薄膜和内、外层荧光膜发生变形,所述内层荧光膜在接触位置的应力作用下产生细小裂纹,所述外层荧光膜的光透过所述细小裂纹并带来接触位置的颜色变化。3.如权利要求2所述的柔性机械手,其特征在于,所述内层荧光膜与所述外层荧光膜的荧光材料的颜色形成互补色,优选地,所述内层荧光膜的荧光材料为橙色,所述外层荧光膜的荧光材料为黄绿色。4.如权利要求2或3所述的柔性机械手,其特征在于,所述内层荧光膜的荧光材料是所述透明弹性薄膜在松弛状态下涂覆形成的,所述外层荧光膜的荧光材料是所述透明弹性薄膜在膨胀状态下涂覆形成的;优选地,所述内层荧光膜还涂覆有透明光油,所述外层荧光膜上还涂覆有透明硅胶。5.如权利要求1至4任一项所述的柔性机械手,其特征在于,所述弹性软囊内充有固体颗粒与液体的透明混合液,抓取物体时将所述弹性软囊内的液体抽出,产生颗粒聚集效应,使所述固体颗粒阻塞聚团,所述弹性软囊根据所述物体的表面形状自适应地改变形状,并通过所述固体颗粒的阻塞聚团作用夹紧物体,实现物体抓取。6.如权利要求5所述的变刚度柔性夹爪,其特征在于,所述固体颗粒与液体混合成密度与水相近的悬浮液,密度为0.9
‑
1.1g/cm3,优选为1.03g/cm3。7.如权利要求6所述的变刚度柔性夹爪,其特征在于,所述固体颗粒为聚十二内酰胺材料,所述液体为nacl溶液或糖水溶液;优选地,所述nacl溶液按重量份含0.9份nacl与100份水;优选地,所述固液混合液由50到80份所述固体颗粒与100份的所述nacl溶液混合而成。8.如权利要求1至4任一项所述的柔性机械手,其特征在于,还包括用于进行抓取的机械夹爪,所述透明流体介质为透明气体或透明液体。9.如权利要求8所述的柔性机械手,其特征在于,所述弹性软囊作为机械手手掌设置在所述柔性机械手的中央,所述机械夹爪设置在所述弹性软囊的侧边。10.一种具备力和触觉传感功能的传感器,其特征在于,包括弹性软囊和摄像机,所述弹性软囊内充有透明流体介质,所述弹性软囊包括层叠设置的透明弹性薄膜和力致变色膜,当所述弹性软囊接触到物体时,所述透明弹性薄膜和所述力致变色膜发生变形,所述力致变色膜在应力作用下产生接触位置的颜色变化,所述摄像机透过所述弹性软囊和所述透明流体介质获取在相应位置产生颜色变化的图像,其中,根据所述颜色变化确定接触位置的应力,进而确定所述物体的形状,所述柔性机械手根据所确定的物体形状进行物体抓取。
技术总结
一种具备力和触觉传感功能的柔性机械手及传感器,该柔性机械手包括弹性软囊和摄像机,所述弹性软囊内充有透明流体介质,所述弹性软囊包括层叠设置的透明弹性薄膜和力致变色膜,当所述弹性软囊接触到物体时,所述透明弹性薄膜和所述力致变色膜发生变形,所述力致变色膜在应力作用下产生接触位置的颜色变化,所述摄像机透过所述弹性软囊和所述透明流体介质获取在相应位置产生颜色变化的图像,其中,根据所述颜色变化确定接触位置的应力,进而确定所述物体的形状,所述柔性机械手根据所确定的物体形状进行物体抓取。本发明为机械手提供了一种触觉力和触觉感知反馈机制,尤其可以帮助机器人在视觉受限情况下建立对环境、被操作物的感知。操作物的感知。操作物的感知。
技术研发人员:梁斌 尹向辉 李寿杰 王学谦
受保护的技术使用者:清华大学深圳国际研究生院
技术研发日:2021.09.14
技术公布日:2021/12/2
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。