可密封容器
1.本技术是申请日为2016年06月09日,申请号为“201680032062.8”,而发明名称为“用于监测半导体工厂自动化系统的参数的系统及方法”的发明专利申请的分案申请。
2.相关申请案的交叉参考
3.本技术案依据35u.s.c.
§
119(e)主张名为莫尔
·
阿扎亚(mor azarya)、迈克尔d.布雷恩(michael d.brain)、阿米
·
阿佩尔鲍姆(ami appelbaum)、沙伊
·
马克(shai mark)及阿里
·
霍夫曼(arie hoffman)的发明者的标题为“自动测量及监测例如半导体工厂自动化系统及晶片充电器的调平、教示、对准、洁净度及健康的参数的方法(method to automatically measure and monitor parameters such as the leveling,teaching,alignment,cleanliness,and health of semiconductor factory automation systems and wafer charger)”的2015年6月16日申请的第62/180,060号美国临时申请案的权利,所述临时申请案的全文以引用的方式并入本文中。
技术领域
4.本发明大体上涉及监测半导体工厂自动化系统的条件,且更特定来说,本发明涉及一种用于监测半导体工厂自动化系统的参数的仪器化衬底。
背景技术:
5.现代半导体装置生产线的工艺流程利用由一系列半导体生产工具执行的众多生产步骤。工艺流程可含有一组半导体装置生产线工具(其包含一百个以上不同类型的一千个以上装备单元)之间的重入流程中的800个以上过程步骤。通常,由自动化系统使工艺流程中的晶片移动通过可密封容器或前开式晶片传送盒(foup)中的过程步骤。自动化系统可包含foup处置系统(例如自动化材料处置系统(例如架空运送系统、自动化仓储及其类似者))及处理及计量装备的foup/晶片处置系统。
6.加速度计用于测量振动且手动解译数据以确定自动化系统健康。加速度计通常用作为故障排除练习或新安装设备的验收测试的部分。一些加速度计系统安装到晶片或类似尺寸的其它衬底。手动识别半导体生产线自动化系统的错误及偏差较繁琐及缓慢,使得难以识别自动化系统的错误及偏差的根本原因。因此,将期望提供一种用于消除例如以上所识别的缺陷的系统及方法。
技术实现要素:
7.根据本发明的一或多个说明性实施例而揭示一种用于监测半导体工厂的自动化系统的一或多个条件的系统。在一个实施例中,所述系统包含一或多个仪器化衬底。在另一实施例中,所述一或多个仪器化衬底包含一或多个传感器。在另一实施例中,所述一或多个传感器经配置以在所述一或多个仪器化衬底横穿所述半导体工厂的一或多个部分时测量所述一或多个仪器化衬底的一或多个条件。在另一实施例中,所述一或多个仪器化衬底包含衬底通信电路以及以通信方式耦合到所述一或多个传感器及所述衬底通信电路的一或
多个处理器。
8.在另一实施例中,所述系统包含经配置以将所述一或多个仪器化衬底运送通过所述半导体工厂的一或多个可密封容器。在另一实施例中,所述一或多个可密封容器包含容器通信电路。在另一实施例中,所述容器通信电路可以通信方式耦合到所述衬底通信电路。在另一实施例中,所述容器通信电路经配置以经由所述衬底通信电路接收来自所述一或多个仪器化衬底的所述一或多个传感器的传感器数据。
9.在另一实施例中,所述系统包含一或多个系统服务器。在另一实施例中,所述一或多个系统服务器包含服务器通信电路。在另一实施例中,所述服务器通信电路可以通信方式耦合到所述一或多个可密封容器。在另一实施例中,所述服务器通信电路经配置以接收来自所述容器通信电路的所述传感器数据。在另一实施例中,所述一或多个系统服务器经配置以识别所述一或多个仪器化衬底的所述一或多个测量条件的一或多个偏差。
10.根据本发明的一或多个说明性实施例而揭示一种用于将一或多个衬底运送通过半导体工厂的可密封容器。在一个实施例中,所述可密封容器包含经配置以容纳仪器化衬底的外壳。在另一实施例中,所述仪器化衬底包含一或多个传感器。在另一实施例中,所述一或多个传感器经配置以在所述可密封容器将所述仪器化衬底运送通过所述半导体工厂的一或多个部分时测量所述仪器化衬底的一或多个条件。在另一实施例中,所述仪器化衬底包含衬底通信电路以及以通信方式耦合到所述一或多个传感器及所述衬底通信电路的一或多个处理器。在另一实施例中,所述可密封容器包含容器通信电路。在另一实施例中,所述衬底通信电路经配置以将传感器数据从所述一或多个传感器发射到所述容器通信电路。在另一实施例中,所述容器通信电路经配置以将所述传感器数据发射到服务器的服务器通信电路。
11.根据本发明的一或多个说明性实施例而揭示一种用于监测半导体工厂的自动化系统的一或多个条件的方法。在一个实施例中,所述方法包含:在可密封容器中将仪器化衬底运送通过半导体生产设施的一或多个部分。在另一实施例中,所述方法包含:测量所述仪器化衬底在所述半导体生产设施内的一或多个位置处的一或多个条件。在另一实施例中,所述方法包含:将所述一或多个测量条件从所述仪器化衬底发射到所述可密封容器。在另一实施例中,所述方法包含:将所述一或多个测量条件从所述可密封容器发射到系统服务器。在另一实施例中,所述方法包含:使用所述系统服务器来识别所述一或多个测量条件的一或多个偏差。
12.应了解,以上一般描述及以下详细描述两者仅为示范性及解释性的,且未必限制所主张的发明。并入本说明书中且构成本说明书的部分的附图说明本发明的实施例且与一般描述一起用于解释本发明的原理。
附图说明
13.所属领域的技术人员可通过参考附图而优选地理解本发明的许多优点,其中:
14.图1a是根据本发明的一或多个实施例的用于测量半导体自动化系统的一或多个条件的系统的概念图。
15.图1b是根据本发明的一或多个实施例的用于测量半导体自动化系统的一或多个条件的系统的框图。
16.图1c是根据本发明的一或多个实施例的仪器化衬底的示意图。
17.图1d是根据本发明的一或多个实施例的插入到可密封容器中的仪器化衬底的示意图。
18.图1e是根据本发明的一或多个实施例的由充电站充电的可密封容器的示意图。
19.图1f是根据本发明的一或多个实施例的配备有用于对仪器化衬底的可再充电电池充电的射频接收线圈的所述仪器化衬底的示意图。
20.图1g是根据本发明的一或多个实施例的用于将电力或数据远程转移到仪器化衬底的外部电力转移装置的示意图。
21.图1h是根据本发明的一或多个实施例的容纳于可密封容器内的外部电力转移装置及仪器化衬底的示意图。
22.图1i是根据本发明的一或多个实施例的将电力感应转移到仪器化衬底的外部电力转移装置的框图。
23.图2是描绘根据本发明的一或多个实施例的当仪器化衬底横穿半导体生产设施的一或多个部分时由仪器化衬底的一或多个传感器测量的加速度数据的数据图。
24.图3是根据本发明的一或多个实施例的用于测量半导体生产设施内的仪器化衬底的一或多个条件的系统的实施方案的框图。
25.图4a是描绘根据本发明的一或多个实施例的当仪器化衬底横穿半导体生产设施的一或多个部分时测量所述仪器化衬底的一或多个条件的方法的工艺流程图。
26.图4b是根据本发明的一或多个实施例的指示测量任务的各种步骤及目标工具的实例报告(其发射到用户)的图示。
具体实施方式
27.现将详细参考附图中所说明的揭示标的物。
28.大体上参考图1a到4b来描述根据本发明的一或多个实施例的用于监测半导体自动化系统的一或多个条件的系统及方法。本发明的实施例是针对半导体工厂或生产线的自动化系统的一或多个参数及/或条件的自动测量及/或监测。举例来说,由本发明的实施例测量及/或监测的参数及/或条件可包含(但不限于)自动化系统的调平、教示、对准、洁净度、压力及/或健康。此类自动化系统可包含(但不限于)自动化材料处置系统(例如架空运送系统、自动化仓储及其类似者)及处理及计量装备的foup/晶片处置系统。由本发明的各种实施例提供的自动化测量及/或监测方法提供有助于识别半导体工厂自动化系统的一或多个部分的操作的错误或偏差的根本原因的可行结果及趋势。
29.2012年1月31日发布的第8,104,342号美国专利中论述一种用于测量半导体制造设施中的工艺条件的装置,所述专利的全文以引用的方式并入本文中。2011年3月31日公布的第2011/0074341号美国专利公开案中论述一种接口系统及一种传感器晶片,所述案的全文以引用的方式并入本文中。2015年5月1日公布的第2014/0122654号美国专利公开案中论述一种用于半导体处置系统中的接口系统,所述专利公开案的全文以引用的方式并入本文中。
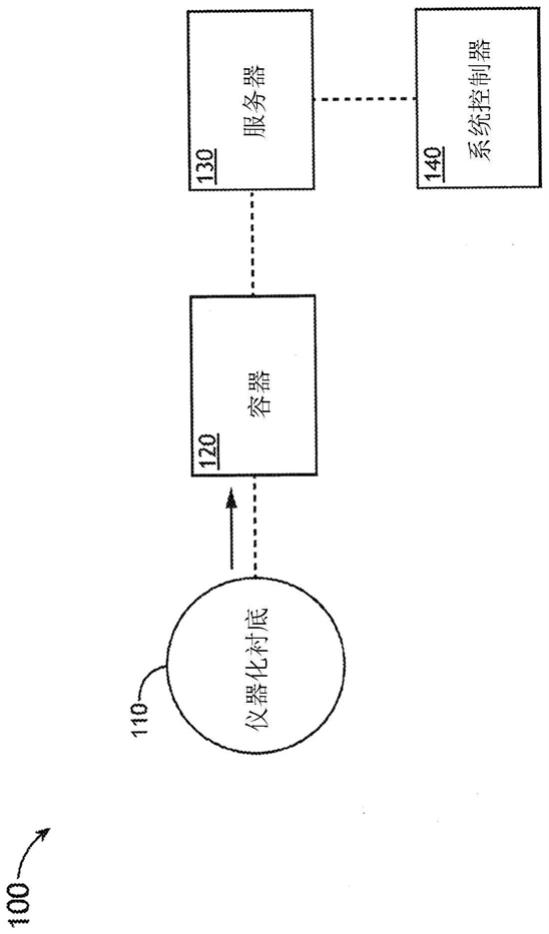
30.图1a说明根据本发明的一或多个实施例的用于测量半导体自动化系统的一或多个条件的系统100的概念框图。
31.在一个实施例中,系统100包含一或多个仪器化衬底110。举例来说,一或多个仪器化衬底110可包含(但不限于)一或多个仪器化半导体晶片110。在另一实施例中,系统100包含一或多个可密封容器120。在一个实施例中,一或多个可密封容器120经配置以接纳且固定一或多个仪器化衬底110。仪器化衬底110经配置以在容纳仪器化衬底110的可密封容器120行进通过半导体自动化系统时测量仪器化衬底110的一或多个条件。一或多个仪器化晶片110可与一或多个可密封容器120以通信方式耦合(例如,无线或有线耦合)。在一个实施例中,由一或多个仪器化晶片110测量的条件可存储于一或多个仪器化衬底110上且接着被转移到一或多个可密封容器120。举例来说,可将仪器化晶片110放置到可密封容器120中以观察产品晶片在其移动通过可密封容器运送及存储系统时经历的振动及/或其它条件且接着观察所述产品晶片在其移动通过与例如(但不限于)处理、计量、分选、运送、存储及装运的操作相关联的晶片处置系统时经历的振动及/或其它条件。
32.在另一实施例中,系统100包含服务器130。在一个实施例中,服务器130以通信方式耦合(例如,无线或有线耦合)到一或多个可密封容器120。就此来说,由一或多个仪器化晶片110测量的条件可存储于一或多个仪器化衬底110上且接着被转移到一或多个可密封容器120。接着,一或多个可密封容器120可将测量条件转移到服务器130。在此意义上,一或多个可密封容器120可用于扩展一或多个仪器化晶片110的能力。举例来说,一或多个可密封容器120可包含存储器来缓冲来自仪器化衬底110的传感器数据且包含电源来对仪器化衬底110再充电。另外,一或多个可密封容器120可包含额外传感器来提供关于位置、活动及状态的额外容器传感器数据。一或多个可密封容器120还可包含可提供额外处理能力来分析所获取的传感器数据的一或多个处理器。举例来说,一或多个可密封容器120可管理数据采集或充当数据缓冲器,借此由一或多个可密封容器120存储来自一或多个仪器化衬底110的一或多个测量条件,直到可将数据转移到服务器130。通过另一实例的方式,一或多个可密封容器120可充当发射中继器,借此来自一或多个仪器化衬底110的一或多个测量条件将所接收的一或多个测量条件从一或多个仪器化衬底110即时(或几乎即时)转移到服务器130。在另一实施例中,由一或多个仪器化晶片110测量的条件可存储于一或多个仪器化衬底110上且接着在稍后时间被直接转移到服务器130。就此来说,测量条件可缓冲于一或多个仪器化衬底110上且在稍后时间被转移到服务器130。
33.在另一实施例中,服务器130可接收且分析一或多个测量条件。举例来说,服务器130可分析由仪器化衬底110测量的一或多个条件以识别由一或多个仪器化衬底110测量的一或多个条件的一或多个偏差。
34.在另一实施例中,系统100包含系统控制器140。系统控制器140可以通信方式耦合到服务器130。在一个实施例中,一旦完成来自一或多个仪器化衬底110的一或多个测量条件的分析,则服务器130将分析数据发射到系统控制器140。系统控制器140可包含(但不限于)制造执行系统(mes)。
35.图1b说明根据本发明的一或多个实施例的用于测量半导体自动化系统的一或多个条件的系统100的框图。
36.在一个实施例中,仪器化衬底110包含一或多个传感器111及支持电路。支持电路可包含(但不限于)一或多个处理器(例如微处理器)、存储器114、通信电路116及/或供电电路118。图1c说明根据本发明的实施例的仪器化衬底110的简化示意图。在一个实施例中,如
图1c中所展示,仪器化衬底110的一或多个传感器111及支持电路安置于衬底110的表面上。在另一实施例中,仪器化衬底110的一或多个传感器111及支持电路安置于衬底110内(例如,安置于衬底110的凹腔内)。
37.仪器衬底110的一或多个传感器111可包含所属领域中已知的任何传感器,其适合用于在仪器化衬底110通过半导体自动化系统时测量仪器化衬底110的一或多个条件。在一个实施例中,一或多个传感器111包含一或多个运动传感器。举例来说,一或多个传感器111可包含(但不限于)三轴加速度计、磁力计及/或陀螺仪。在另一实施例中,一或多个传感器111包含一或多个额外传感器。举例来说,一或多个传感器111包含(但不限于)用于测量污染程度的传感器、用于测量湿度的湿度传感器、用于测量选定气体的存在的气体传感器、用于测量选定化合物/化学品的存在的化学传感器、用于测量温度的温度传感器、用于测量压力的压力传感器及/或用于测量声级的音频传感器。应注意,以上所提供的传感器的列表不具限制性,而是仅用于说明目的。
38.再次参考图1b,在一个实施例中,一或多个可密封容器120包含一或多个处理器122、存储器124、通信电路126、一或多个传感器121及/或供电电路128。如本文先前所提到,一或多个可密封容器120的一或多个处理器122、存储器124、通信电路126、一或多个传感器121及/或供电电路128可用于拓展一或多个仪器化衬底110的能力。在另一实施例中,服务器130包含一或多个处理器132、存储器134及通信电路136。
39.可密封容器120的一或多个传感器121可用于测量及监测可密封容器120及/或容纳于可密封容器120内的仪器化晶片110的各种条件。举例来说,可密封容器120的一或多个传感器121测量与可密封容器120的运送相关联的运动(例如加速度、旋转速度及其类似者),这允许系统100将可密封容器120及仪器化衬底110定位于半导体生产自动化系统中。
40.可密封容器120的一或多个传感器121可包含所属领域中已知的任何传感器,其适合用于在可密封容器120通过半导体自动化系统时测量可密封容器120内的一或多个条件。在一个实施例中,一或多个传感器121包含一或多个运动传感器。举例来说,一或多个传感器121可包含(但不限于)三轴加速度计、磁力计及/或陀螺仪。在另一实施例中,一或多个传感器121包含一或多个额外传感器。举例来说,一或多个传感器121包含(但不限于)用于测量污染程度的传感器、用于测量湿度的湿度传感器、用于测量选定气体的存在的气体传感器、用于测量选定化合物/化学品的存在的化学传感器、用于测量温度的温度传感器、用于测量压力的压力传感器及/或用于测量声级的音频传感器。应注意,以上所提供的传感器的列表不具限制性,而是仅用于说明目的。
41.仪器化衬底110的一或多个处理器112、可密封容器120的一或多个处理器122及/或服务器130的一或多个处理器132可包含所属领域中已知的任何一或多个处理元件。在此意义上,一或多个处理器可包含经配置以执行软件算法及/或程序指令的任何微处理器型装置。应认识到,本发明中所描述的数据处理步骤可由处理器112、122及132中的任何者实施。一般来说,术语“处理器”可经广义界定以涵盖具有一或多个处理或逻辑元件(其执行来自非暂时性存储器媒体(例如存储器114、124及/或134)的程序指令)的任何装置。此外,系统100的不同子系统可包含适合用于实施本发明中所描述的步骤的至少一部分的处理器或逻辑元件。因此,以上描述不应被解释为对本发明的限制,而是仅用于说明目的。
42.仪器化衬底110的存储器114、可密封容器120的存储器124及服务器130的存储器
134可包含所属领域中已知的任何数据存储媒体,其适合用于存储可由一或多个相关联处理器执行的程序指令。举例来说,存储器114、124及/或134可包含非暂时性存储器媒体。举例来说,存储器可包含(但不限于)只读存储器、随机存取存储器、磁性或光学存储器装置(例如磁盘)、磁带、固态驱动器及其类似者。应注意,在本文的另一实施例中,存储器经配置以存储来自系统100的一或多个结果及/或本文所描述的各种步骤的输出。在另一实施例中,存储器114、124及/或134存储用于致使一或多个相关联处理器实施本发明中所描述的各种数据处理步骤的程序指令。
43.在一个实施例中,在仪器化衬底110的通信电路116与可密封容器120的通信电路126之间建立通信链路。举例来说,将指示由仪器化衬底110的一或多个传感器111测量的一或多个条件的一或多个数据信号117经由衬底通信电路116发射到容器通信电路126。接着,可密封容器120可将指示已存储于容器120中的传感器数据的一或多个额外数据信号127经由容器通信电路126与服务器通信电路136之间的通信链路转移到服务器130。
44.在一个实施例中,经由无线连接建立仪器化晶片110与可密封容器120之间的通信链路。所属领域中已知的任何无线通信协议可用于建立仪器化晶片110与可密封容器120之间的通信链路。举例来说,衬底110的通信电路116(例如发射器及接收器)及容器120的通信电路126(例如发射器及接收器)可经配置以建立射频(rf)数据链路。举例来说,仪器化衬底110与容器120之间的rf数据链路可包含短程rf通信协议,例如(但不限于)蓝牙(例如低功耗蓝牙)、wifi或定制感应耦合通信链路。通过另一实例的方式,衬底110的通信电路116及容器120的通信电路126可经配置以建立红外线数据链路。
45.在另一实施例中,经由传输线连接建立仪器化衬底110与可密封容器120之间的通信链路。所属领域中已知的任何传输线技术可用于建立仪器化晶片110与可密封容器120之间的通信链路117。举例来说,传输线可包含(但不限于)有线连接(例如tcp/ip)或光纤连接(例如光纤束)。另外,就传输线连接来说,仪器化衬底110及容器120可各自配备有对应输入/输出端口来允许通信电路116与126之间的直接连接。
46.在另一实施例中,经由无线连接建立可密封容器120与服务器130的通信电路136之间的通信链路。所属领域中已知的任何无线通信协议可用于建立可密封容器120与服务器130之间的通信链路。举例来说,可密封容器120的通信电路126(例如发射器及接收器)及服务器130的通信电路136(例如发射器及接收器)可经配置以建立射频(rf)数据链路。举例来说,仪器化衬底110与容器120之间的rf数据链路可包含rf通信协议,例如(但不限于)wifi、蓝牙、蜂窝式数据链路或定制感应耦合通信链路。通过另一实例的方式,可密封容器120的通信电路126及服务器130的通信电路136可经配置以建立红外线数据链路。
47.在另一实施例中,经由传输线连接建立可密封容器120与服务器130之间的通信链路。所属领域中已知的任何传输线技术可用于建立可密封容器120与服务器130之间的通信链路。举例来说,传输线可包含(但不限于)有线连接(例如tcp/ip)或光纤连接(例如光纤束)。另外,就传输线连接来说,可密封容器120及服务器130可各自配备有对应输入/输出端口来允许通信电路126与136之间的直接连接。
48.在另一实施例中,系统100包含经由数据链路139以通信方式耦合到服务器130的用户接口135。在一个实施例中,用户接口135以通信方式耦合到服务器130的一或多个处理器132。在另一实施例中,可由服务器130利用用户接口装置135来接收来自用户的选择及/
或指令,如本文将进一步论述。在一些实施例中,如本文将进一步描述,显示器可用于对用户(未展示)显示数据。接着,用户可响应于经由显示装置对用户显示的数据而经由用户输入装置(未展示)输入选择及/或指令。
49.用户接口装置135可包含所属领域中已知的任何用户接口。举例来说,用户接口135的用户输入装置可包含(但不限于)键盘、键区、触摸屏、控制杆、旋钮、滚轮、轨迹球、开关、拨盘、滑动条、滚动条、滑件、手柄、触垫、翼片、方向盘、操纵杆、边框输入装置或其类似者。就触摸屏接口装置来说,所属领域的技术人员应认识到,大量触摸屏接口装置可适合实施于本发明中。举例来说,显示装置可与触摸屏接口(例如(但不限于)电容式触摸屏、电阻式触摸屏、基于表面声波的触摸屏、基于红外线的触摸屏或其类似者)集成。一般来说,能够与显示装置的显示部分集成的任何触摸屏接口适合实施于本发明中。在另一实施例中,用户输入装置可包含(但不限于)边框安装接口。
50.显示装置可包含所属领域中已知的任何显示装置。在一个实施例中,显示装置可包含(但不限于)液晶显示器(lcd)。在另一实施例中,显示装置可包含(但不限于)基于有机发光二极管(oled)的显示器。在另一实施例中,显示装置可包含(但不限于)crt显示器。所属领域的技术人员应认识到,各种显示装置可适合实施于本发明中且显示装置的特定选择可取决于包含(但不限于)形状因子、成本及其类似者的各种因素。一般来说,能够与用户输入装置(例如平板计算机的触摸屏、边框安装接口、键盘、鼠标、轨迹垫及其类似者)集成的任何显示装置适合实施于本发明中。
51.图1d说明根据本发明的实施例的简化示意图150,其描绘将仪器化衬底110插入到可密封容器120中。在一个实施例中,可密封容器120包含前开式晶片传送盒(foup)。半导体自动化系统的生产线工具(图1a到1b中未展示)可取得可密封容器120的内容物来处理。如图1d中所展示,可密封容器120可接纳仪器化衬底110且将仪器化衬底110固定于可密封容器120的外壳内。如本文先前所提及,将指示由仪器化衬底110的一或多个传感器111测量的一或多个条件的一或多个数据信号经由衬底通信电路116沿数据链路117发射到容器通信电路126。接着,可密封容器120可将指示已存储于容器120中的传感器数据的一或多个额外数据信号经由容器通信电路126转移到服务器130。在另一实施例中,一旦使用容器传感器121来测量可密封容器120的一或多个条件,则可密封容器120可将从可密封容器传感器121获取的一或多个额外数据信号经由容器通信电路126转移到服务器130。
52.再次参考图1b,在一个实施例中,仪器化衬底110包含供电电路118。供电电路118可将电力供应到仪器化衬底110的一或多个传感器111及支持电路(例如一或多个处理器112、存储器114及/或通信电路116)。在一个实施例中,供电电路118包含一或多个可再充电电池。在另一实施例中,供电电路118包含一或多个可替换电池。在另一实施例中,就可再充电电池来说,仪器化晶片110可包含无线电池充电器,借此无线电池充电器远程接收来自外部电源的能量且接着对一或多个可再充电电池充电。
53.在另一实施例中,可密封容器120包含供电电路128。可密封容器120的供电电路128可将电力供应到容纳于可密封容器内(参阅图1d)的仪器化晶片110。如本文将进一步详细描述,可从可密封容器120的电源经由直接连接(例如铜线)或通过感应耦合而转移电能。在一个实施例中,可密封容器120的供电电路128包含一或多个可替换电池。在一个实施例中,可密封容器120的供电电路128包含一或多个可再充电电池。
54.图1e说明用于对可密封容器120的一或多个可再充电电池再充电的充电站152的示意图150。在一个实施例中,充电站152将电力无线供应到可密封容器120。在另一实施例中,在可密封容器120包含一或多个可再充电电池的情况中,可密封容器120包含无线电池充电器,借此无线电池充电器远程接收来自充电站152的能量且接着对可密封容器120的一或多个可再充电电池充电。举例来说,可密封容器120可包含一或多个rf接收线圈(未展示),借此从充电站152的一或多个rf发射线圈感应转移能量且接着又由一或多个rf接收线圈收集的能量对可密封容器120的一或多个可再充电电池充电。
55.系统100可包含任何数目个充电站152且可定位于整个半导体自动化系统的任何位置处。举例来说,一或多个充电站152可定位于任何oht可接近位置(例如自动化仓储、缓冲区、轨下仓储、装载港等等)处或定位于所述位置附近。在另一实施例中,充电站152配备有通信电路(图1e中未展示)。举例来说,充电站的通信电路可从可密封容器120的存储器124或仪器化衬底110的存储器分别经由通信电路126或116转移传感器数据。此外,可经由无线连接(例如wifi、蓝牙及其类似者)或传输线连接(例如tcp/ip或光纤)建立可密封容器120的通信电路126及/或仪器化衬底110的通信电路116之间所建立的数据链路。
56.图1f说明配备有无线充电器162及电耦合到无线充电器162的一或多个可再充电电池163的仪器化晶片110的简化示意图160。举例来说,无线电池充电器162可包含可感应接收来自外部电力转移装置的能量的一或多个rf线圈167。接着,可将电能转移到一或多个可再充电电池163,一或多个可再充电电池163接着对仪器化衬底110的其它各种电子组件供电。
57.图1g说明适合用于将电力转移到仪器化衬底110的一或多个rf接收线圈167的外部电力转移装置165的简化示意图161。在一个实施例中,外部电力转移装置165包含用于将电力从外部电力转移装置165感应转移到仪器化晶片110的无线电池充电器162的rf接收线圈167的一组rf发射线圈164。
58.在一个实施例中,外部电力转移装置165可定位于仪器化晶片110下方的位置处,从而允许外部电力转移装置165将电力感应转移到安置于仪器化衬底110上或仪器化衬底110内的无线电池充电器162。在另一实施例中,外部电力转移装置165可定位于仪器化晶片110上方的位置处。发射线圈164越靠近无线电池充电器162的rf接收线圈167,则感应耦合越好。举例来说,无线电池充电器162的rf发射线圈164与rf接收线圈167之间的距离可小于10mm。
59.在另一实施例中,rf发射线圈组164围绕外部电力转移装置165的外围布置成圆形阵列。应注意,无线电池充电器162的rf接收线圈167应与rf发射线圈164的一或多者对准以引导磁场建立充分耦合及高效电力转移。图1g中描绘此对准布置。举例来说,单个发射线圈164可用于将电力从外部电力转移装置165转移到仪器化晶片110的无线电池充电器162的rf接收线圈167。举例来说,用于转移电力的rf发射线圈可为与无线电池充电器162的rf接收线圈167最佳对准的rf发射线圈168。
60.图1h说明根据本发明的实施例的安置于可密封容器120内的外部电力转移装置165的简化示意图170。在一个实施例中,外部电力转移装置165安置于可密封容器120内且位于仪器化晶片110下方。为简明的目的,图1h中仅描绘仪器化晶片110上的无线电池充电器162及rf接收线圈167。
61.在另一实施例中,尽管未展示,但外部电力转移装置165可耦合到可密封容器120中的供电电路128(如图1b中所展示)。就此来说,可密封容器120的供电电路128可将电力供应到外部转移装置165,接着,外部转移装置165将电力发射到仪器化晶片110的rf接收线圈167。
62.图1i说明根据本发明的实施例的从外部电力转移装置165的发射线圈到rf接收线圈167的电力转移的框图180。在一个实施例中,由线圈控制器182a到182d中的一者(例如集成电路电力控制器)控制每一发射线圈164a到164d(或三个发射线圈的群组)。在另一实施例中,每一控制器182a到182d周期性地“发送ping命令给”其对应发射线圈164a到164d且寻找对应发射线圈164a到164d上的感应负载。此感应负载的存在指示仪器化晶片110的发射线圈164a到164d中的一者与rf接收线圈167之间的磁性耦合。在此感应负载存在于发射线圈164a到164d中的一者上的情况中,控制器开始经由指示为经历感应负载的发射线圈(例如164b)将电力输送到rf接收线圈167。
63.在另一实施例中,控制电路184以通信方式耦合到线圈控制器182a到182d且经配置以控制控制器182a到182d中的每一者。在一个实施例中,控制电路184一次激活控制器182a到182d中的一者,使得经最佳对准的发射线圈被选择用于电力输送。举例来说,控制电路184可包含(但不限于)现场可编程门阵列(fpga)。在另一实施例中,控制电路184以通信方式耦合到仪器化晶片110的一或多个部分(例如一或多个传感器111)或可密封容器120的一或多个部分(例如usb通道)。
64.在另一实施例中,有源线圈控制器(例如图i中的182b)可监测输入电力、损耗及/或由rf接收线圈167报告的电力值。基于此信息,有源控制器可接着估计有多少电力未计算在内及归因于放置于无线电力转移路径中的金属物体的推算损耗。如果此意外损耗超过选定阈值,那么报告故障且停止电力转移。
65.在另一实施例中,外部电力转移装置165及/或仪器化衬底110包含屏蔽部分。举例来说,可将磁性屏蔽材料/元件作为背衬添加到外部电力转移装置165的一或多个发射线圈164及/或仪器化衬底110的rf接收线圈167。屏蔽用于将磁场引导到耦合区。因而,耦合区外的任何磁场无法转移电力。因此,屏蔽还用于牵制磁场避免耦合到其它邻近系统组件。
66.应注意,外部电力转移装置165的配置不受限于以上所描述及图1g中所描绘的布置(其仅用于说明目的)。应认识到,在本文中,任何数目个发射线圈及发射线圈的任何布置可用于外部电力转移装置165中。
67.举例来说,发射线圈164的布置可呈现所属领域中已知的任何几何布置。举例来说,布置可包含圆形阵列、椭圆形阵列、多边形阵列、矩形阵列、一或多个线性阵列及其类似者。此外,应注意,接收线圈167的配置不受限于以上所描述及图1f中所描绘的布置(其仅用于说明目的)。应认识到,在本文中,任何数目个接收线圈及接收线圈的任何布置可用于仪器化衬底110上。举例来说,仪器化衬底110可包含两个或两个以上接收线圈167。
68.在一个实施例中,系统100执行教示序列以建立基线数据集。在一个实施例中,当安装系统或以其它已知方式使系统处于适当操作条件中时,可获取每一半导体自动化系统的基线数据集。在另一实施例中,可获取多个基线数据集来寻找条件或时序的量值的正常变动。在一个实施例中,可经由用户接口手动检查所获取的传感器数据以确保系统处于正确状态中。在另一实施例中,可由运算系统执行的一或多个算法检查所获取的传感器数据
以确保系统处于正确状态中。
69.图2说明根据本发明的实施例的曲线图200,其描绘使用用于执行教示序列的仪器化衬底110的一或多个传感器111来测量的传感器数据。曲线图200说明用于跟踪由仪器化衬底110经历且因此由产品衬底经历的振动的依据时间而变化的加速度(利用一或多个传感器111的一或多个运动传感器来测量)。
70.在一个实施例中,在从一或多个传感器111获取传感器数据之后,系统100可经由用户接口135显示传感器数据以及其它系统信息以使用户能够识别物理位置及关键活动。举例来说,一或多个关键活动可包含(但不限于)由机器人终端效应器从可密封容器120拾取衬底110。通过另一实例的方式,一或多个关键活动可包含(但不限于)将衬底110放置于测量台上。可在教示周期期间捕获此及类似信息且将其存储为教示数据。
71.应注意,衬底110在其移动通过半导体自动化系统的装备时选取物理路径且经由一或多个传感器111搜集与衬底的移动(及其它物理条件)相关联的条件/参数数据。在一个实施例中,所收集的运动数据(例如加速度、时间及/或陀螺仪数据)可用于通过数学重建仪器化衬底110的运动。在另一实施例中,所收集的运动数据(例如加速度、时间及/或陀螺仪数据)可用于通过数学重建仪器化衬底110通过半导体自动化系统的物理路径。接着,可将建构路径显示于用户接口135的显示器上。在另一实施例中,可由用户标记沿建构路径的区域,借此提供位置的地理背景。在另一实施例中,可由用户标记仪器化衬底110的运动,借此提供运动的机械背景。应注意,对仪器化衬底110的运动的机械背景的理解有助于识别沿半导体生产自动化系统的各种机制失效。
72.举例来说,如图2中所展示,就将衬底放置到对准器上来说,用户可将此位置标记或标示为“对准器”。应注意,衬底对准器(例如半导体晶片对准器)用于使衬底围绕轴高速自旋。相较于其它装备上的类似对准器或相较于此对准器应如何执行的理论模型,将此区域标记为“对准器”允许此区域被有意义地批注于将来发生于此位置处的事件中。应注意,可由用户标记沿建构路径的任何数目个区域。额外区域包含(但不限于)分别标记为foup或“置物台”的一或多个可密封容器或一或多个衬底台,如图2中所展示。
73.在另一实施例中,由服务器130的一或多个处理器132执行的程序指令可分析传感器数据以观察仪器化衬底110的状态的变化,例如(但不限于)由一或多个传感器111(例如加速度计及/或陀螺仪)记录的方向变化。在另一实施例中,可由服务器130自动选择及突显这些状态变化。接着,服务器132可经由用户接口135将标记这些状态变化的请求发射到用户。一系列潜在状态变化描绘于图2中且被标记为202、204、206、208、210、212、214、216及218。这些点对应于从可密封容器移除衬底110,使衬底110对准,由给定处理工具处理衬底110且接着将衬底110放回到可密封容器120中时的不同状态变化。如图2中所展示,点202对应于从可密封容器120(foup)拾取衬底110。点204对应于将衬底110放置于对准器上。点206对应于开始使衬底110对准。点208对应于从对准器拾取衬底110。点210对应于将衬底110放置到置物台上。点212对应于执行处理方案。点214对应于从置物台拾取衬底110。点216对应于将衬底110放回到可密封容器120中。
74.应注意,在本文中,常规监测产生可实时或脱机地与存储基线比较的数据流。额外数据(例如衬底110的物理位置)可由传感器111及/或121(例如陀螺仪及加速度计)确定,且可用于将新数据分段且比较每一分段与来自已知良好基线数据的对应分段。在另一实施例
中,可比较传感器数据与一或多个波形以识别给定分段的行为。举例来说,可比较测量传感器数据与一或多个模拟波形以识别给定分段的行为。通过另一实例的方式,当仪器衬底110及/或可密封容器120处于适当或可接受操作状态中时,可比较测量传感器数据与来自传感器111及/或121的波形。通过另一实例的方式,当仪器衬底110及/或可密封容器120处于不可接受操作状态中时,可比较测量传感器数据与使用传感器111及/或121获得的波形。就此来说,可产生波形库,借此系统100可从传感器111及/或121收集针对各种预期问题的波形。在另一实施例中,可比较分段与设备的所有若干部件中的类似类型的一组分段。举例来说,可比较与对准器相关联的波形与半导体工厂中的所有(或部分)对准器。在另一实施例中,可处理数据且比较结果与预先选定阈值(例如最大偏差)或从传感器数据导出的其它标记。
75.基于由教示数据提供的信息,基线与后来测量之间的任何偏差的蕴含可经解释以确定半导体自动化系统的一或多个部分是否存在问题。应进一步注意,当衬底110在不同位置之间移动时,一或多个处理器132可识别处置衬底110时的可能错误。举例来说,当将衬底110转移到置物台时,图2中的点218可对应于错误或问题。一旦已识别偏差或可能问题,则背景数据使分析能够确定给定偏差的可能根本原因。当利用系统时,用户可揭露新根本原因。专家系统方法可用于从用户捕获这些新根本原因且图形辨识技术可用于辨识这些根本原因的未来发生。
76.图3说明根据本发明的一个实施例的实施于半导体工厂300内的系统100。在此实例中,仪器化衬底110是仪器化晶片,可密封容器120是foup,且系统控制器140是mes。在一个实施例中,服务器130与半导体工厂300的测站302集成。就此来说,测站302的服务器130可通过接收仪器化晶片110(来自传感器111)或foup 120(来自传感器121)的一或多个条件(其可经由数据链路127发射到服务器130)而分析半导体工厂300的一或多个部分。在另一实施例中,服务器130可通过在自动化系统沿半导体工厂的物理路径移动foup 120时分析仪器化晶片110或foup 120的一或多个测量条件而分析半导体工厂300的一或多个自动化系统的操作。如本文所提及,自动化系统可包含(但不限于)自动化材料处置系统(例如oht、自动化仓储)、处理及计量装备的foup/晶片处置系统。举例来说,如图3中所展示,oht 306可从测站302拾取foup 120且将foup 120运送到目标工具304。当运送foup 120通过半导体工厂300时,仪器化晶片110及/或foup 120可测量及跟踪仪器化晶片110及/或foup 120的一或多个条件,例如(但不限于)一或多个半导体工厂自动化系统的调平、教示、对准、清洁度、压力及健康。应注意,使测试仪器衬底110以与产品晶片移动通过工厂的方式相同的方式移动通过工厂300以实现最大相关结果。在另一实施例中,一或多个容器充电器152可分布于整个工厂300中以在这些各种位置处对foup 120充电。
77.可实施操作序列以将系统100集成到半导体工厂系统300中。在一个实施例中,可利用其中仪器化衬底110作为标准计量装备出现于工厂系统中的方案。应注意,标准装备可根据选定通信协议与工厂系统控制器140(例如一或多个mes服务器140)通信。举例来说,选定通信协议可包含符合由半导体装备与材料协会(semi)界定的标准的工业标准通信协议。这些标准称为semi装备通信标准(secs)及通用装备模型(gem)。
78.在一个实施例中,系统100的一或多个服务器130可连接到系统控制器(例如mes)且与系统控制器140交互,宛如其为测量装备一样。与自动化计量站302集成的服务器130可与仪器化晶片110及/或foup 120介接以建立测量任务的参数且搜集结果。一旦由服务器搜
集结果,则foup 120或仪器化晶片110可确定已发生异常情况。可将此异常以警告或警报形式报告给系统控制器140(例如mes)。在另一实施例中,系统服务器130可经由例如(但不限于)基于网页的图形用户接口、移动装置、文字消息或邮件的方法与其它工厂系统及用户直接通信。
79.图4说明根据本发明的实施例的工艺流程图400,其描绘当监测半导体工厂的目标工具304时由系统100实施的一组步骤400。在步骤402中,使仪器化晶片110及foup120准备用于通过测站302的服务器130进行的任务。举例来说,可将测量方案加载到仪器化晶片110上。应注意,服务器130可充当半导体工厂300中的搜集数据的所有计量仪器的代理测量仪器。
80.在步骤404中,将foup 120从测站302转移到目标工具304。举例来说,oht 306可从测站302拾取foup 120且将foup 120运送到目标工具304(例如蚀刻器)。在步骤406中,由目标工具304处理容纳于foup 120中的产品晶片。举例来说,就蚀刻器来说,所述蚀刻器可应用选定蚀刻器方案(例如蚀刻器pm方案)。在步骤408中,当目标工具304处理产品晶片时,仪器化晶片110测量仪器化晶片110的一或多个条件。举例来说,仪器化晶片110可经由传感器111(如图1b中展示)测量仪器化晶片110的一或多个条件。此外,foup 120可经由传感器121(如图1b中展示)测量foup 120或晶片111的一或多个条件。在步骤410中,将步骤408的测量传感器数据发射到服务器130。举例来说,可将测量传感器数据从仪器化晶片110转移到foup 120。foup 120又可将测量传感器数据转移到服务器130。通过另一实例的方式,可将测量传感器数据从仪器化晶片110直接转移到服务器130。另外,测量背景可具有传感器数据。举例来说,就蚀刻器来说,可在服务器130上使用蚀刻器pm方案来使传感器数据与蚀刻器1相关。服务器可使用存储方案的这些标示及参数来比较所得数据与基线或其它数据。
81.在步骤412中,确定是否将在任务中测量额外工具。如果应测量额外工具,那么过程400返回到步骤404且重复步骤404到412。举例来说,在测量第一目标工具304(例如第一蚀刻器)之后,oht 306可将foup 120运送到第二目标工具(例如第二蚀刻器)。应进一步注意,可分发一批一或多个仪器化晶片110作为“批次”来遵循此测试过程检验,借此触发两个目标工具(例如蚀刻器)的测量及数据的解译。
82.在步骤414中,将foup 120转移回到测站302。在步骤416中,foup 120可将传感器数据从foup 120转移到测站302。举例来说,foup 120可将传感器数据从foup120转移到测站302的服务器130。在步骤418中,测站302分析从foup 120接收的传感器数据。举例来说,测站302的服务器130分析从foup 120接收的传感器数据。举例来说,本文先前所描述的分析技术中的任何者可用于分析传感器数据。在步骤420中,测站302将分析数据转移到系统控制器140。举例来说,测站302的服务器130可将分析数据转移到系统控制器140。如果传感器数据的分析识别问题,那么可将警报或警告消息发送到主机,这与任务及工作无关。此外,警报的文字可识别问题的位置、检测症状的指示符及根本原因的估计。举例来说,可经由用户接口135将文字报告(例如图4b中所描绘的报告)提供给用户。
83.应注意,在本文中,可通过区段型分析而优选地分析半导体工厂300的一些组件。举例来说,可测量围绕工厂运送材料的运送组件(例如oht)且可使用基于运动传感器数据(例如加速度计数据、磁力计数据及陀螺仪数据)的运算物理位置数据来分析振动数据及/或其它数据。可使用传感器数据来物理地定位可经识别为系统跟踪问题的偏差。另外,还可
识别跟随运送组件的偏差。应注意,在本文中,可通过比较测量传感器数据与用于所述类型的分段的基线或设定点而相应地分类及分析基本移动,例如向左、向右、笔直、上升及下降。
84.本文所描述的所有方法可包含:将方法实施例的一或多个步骤的结果存储于存储器中。结果可包含本文所描述的结果中的任何者且可以所属领域中已知的任何方式存储。存储媒体可包含本文所描述的任何存储媒体或所属领域中已知的任何其它合适存储媒体。在已存储结果之后,结果可存取于存储媒体中且由本文所描述的方法或系统实施例中的任何者使用,经格式化以显示给用户,由另一软件模块、方法或系统使用,等等。此外,可“永久”、“半永久”、临时或在段时间内存储结果。举例来说,存储媒体可为随机存取存储器(ram),且结果可不必无限期地存留于存储媒体中。
85.本文所描述的标的物有时说明容纳于其它组件内或与其它组件连接的不同组件。应了解,此类所描绘的架构仅供例示,且实际上可实施实现相同功能的许多其它架构。在概念意义上,实现相同功能的组件的任何布置经有效“相关联”以实现所要功能。因此,在本文中经组合以实现特定功能的任何两个组件可被视为彼此“相关联”以实现所要功能,不管架构或中间组件如何。同样地,相关联的任何两个组件还可被视为彼此“连接”或“耦合”以实现所要功能,且能够相关联的任何两个组件还可被视为彼此“可耦合”以实现所要功能。“可耦合”的特定实例包含(但不限于)使组件可物理配合及/或物理交互、及/或使组件可无线交互及/或无线交互、及/或使组件逻辑交互及/或可逻辑交互。
86.此外,应了解,本发明由所附权利要求书界定。所属领域的技术人员应了解,一般来说,本文且尤其是所附权利要求书(例如所附权利要求书的主体)中所使用的术语一般希望为“开放式”术语(例如,术语“包含”应被解释为“包含(但不限于)”,术语“具有”应被解释为“至少具有”,等等)。所属领域的技术人员应进一步了解,如果希望在权利要求叙述中引入特定数目,那么此意图将被明确叙述于所述权利要求中,且如果缺少此叙述,那么不存在此意图。举例来说,为有助于理解,以下所附权利要求书可含有使用介绍性词组“至少一个”及“一或多个”来介绍权利要求叙述。然而,此类词组的使用不应被解释为隐含:由不定冠词“一”介绍的权利要求叙述将含有此介绍权利要求叙述的任何特定权利要求限制于仅含有一个此类叙述的发明,即使当相同权利要求包含介绍性词组“一或多个”或“至少一个”及例如“一”的不定冠词(例如,“一”通常应被解释为意味着“至少一个”或“一或多个”);上述内容同样适用于用于介绍权利要求叙述的定冠词的用法。另外,即使明确叙述在权利要求叙述中引入特定数目,但所属领域的技术人员还将认识到,此叙述通常应被解译为意味着至少所叙述的数目(例如,“两个叙述”的裸叙述(无其它修饰语)通常意味着至少两个叙述或两个或两个以上叙述)。此外,在其中使用类似于“a、b及c中的至少一者等等”的约定的例子中,此建构一般意指所属领域的技术人员所理解的约定(例如,“具有a、b及c中的至少一者的系统”将包含(但不限于)仅具有a的系统、仅具有b的系统、仅具有c的系统、同时具有a及b的系统、同时具有a及c的系统、同时具有b及c的系统及/或同时具有a、b及c的系统,等等)。在其中使用类似于“a、b或c中的至少一者等等”的约定的例子中,此建构一般意指所属领域的技术人员所理解的约定(例如,“具有a、b或c中的至少一者的系统”将包含(但不限于)仅具有a的系统、仅具有b的系统、仅具有c的系统、同时具有a及b的系统、同时具有a及c的系统、同时具有b及c的系统及/或同时具有a、b及c的系统,等等)。所属领域的技术人员应进一步了解,不论是否在具体实施方式、权利要求书或图式中,存在两个或两个以上替代术语的
几乎任何转折用语及/或词组应被理解为涵盖包含术语中的一者、术语中的任一者或两个术语的可能性。举例来说,词组“a或b”将被理解为包含“a”或“b”或“a及b”的可能性。
87.据信,将通过以上描述而理解本发明及其许多伴随优点,且应明白,可在不背离所揭示的目标或不牺牲所有其材料优点的情况下对组件的形式、建构及布置作出各种改变。所描述的形式仅用于解释,且所附权利要求书希望涵盖及包含此类改变。此外,应了解,本发明由所附权利要求书界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。