1.本发明涉及农业设备幼果袋套机技术领域,特别涉及一种手持式幼果套袋机的控制系统。
背景技术:
2.水果套袋主要是为防止水果在生长过程中受到鸟类的侵袭、病虫的危害以及风雨阳光的损伤,同时水果套袋后还能有效隔离环境污染对水果的侵蚀,防止水果在生长过程中被树枝刮伤。套袋可产生局部温室效应,使水果保持适当的湿度、温度,提高水果的甜度,改善水果的光泽,增加水果的产量,并缩短其成长期。同时由于生长的过程中不需施用农药,使水果具有高品质且无公害,达到国际标准。
3.由于果林环境错综复杂、果树枝桠参差密布,所以一直以来,果农在给水果套袋时都主要采用传统手工套袋。但传统手工套袋存在费时费力、效率低下,且套袋质量好坏不一的缺陷。虽然为了提高套袋效率、保证套袋质量、减轻人工套袋的劳动强度,现代农业机械化必然是发展方向,但目前市面上还没有成熟的套袋机产品。
技术实现要素:
4.针对上述问题,本发明提出一种手持式幼果套袋机的控制系统,以解决现有技术中存在的技术问题,能够通过对套袋机进行机械化处理,从而解放大量人力,还能够从简单重复、无技术含量的工作中解脱。
5.为实现上述目的,本发明提供了如下方案:本发明提供一种手持式幼果套袋机的控制系统,包括:外部电源、第一稳压模块、第二稳压模块、主控制器模块、舵机驱动模块、电阻丝加热模块、按键输入模块;
6.所述外部电源用于给所述第一稳压模块和所述电阻丝加热模块进行供电;
7.所述第一稳压模块用于将所述外部电源的输入电压进行降压,并对所述第二稳压模块、舵机驱动模块进行供电;
8.所述第二稳压模块用于将所述第一稳压模块的输入电压进行降压,并对所述主控制器模块、按键输入模块、舵机驱动模块、电阻丝加热模块进行供电;
9.所述按键输入模块用于输入按键指令;
10.所述主控制器模块用于监测运行状态,并根据所述按键指令输出响应;
11.所述舵机驱动模块(6)用于根据所述响应驱动舵机运动进行幼果套袋;
12.所述电阻丝加热模块(7)用于根据所述响应对电阻丝进行加热,将果袋部分熔化进行热塑缝合,完成幼果套袋。
13.优选地,所述外部电源采用若干个铝壳单体锂电池。
14.优选地,每个所述铝壳单体锂电池均设有泄压阀。
15.优选地,所述第一稳压模块对所述第二稳压模块、舵机驱动模块进行供电之前对所述输入电压进行噪声与干扰处理。
16.优选地,所述第一稳压模块通过btb连接器对所述第二稳压模块进行供电;所述供电电压为5v。
17.优选地,所述第一稳压模块通过ph2.0端子对所述舵机驱动模块进行供电;所述供电电压为3.3v。
18.优选地,所述按键指令包括工作模式切换和调整电阻丝加热时间。
19.优选地,所述舵机运动的驱动方法为:采用光耦合器芯片pc827对所述舵机驱动模块进行开关控制,并对所述pc827输入端加电信号,产生光电流,通过所述光电流使舵机完成驱动。
20.本发明公开了以下技术效果:
21.本发明手持式幼果套袋机的控制系统结构及电路设计合理,可行性高,控制使用方便快捷,具有模式切换功能,用户可通过按键输入模块的模式切换按键根据自己的需求选择不同的工作模式,工作效率最大化;用户可通过按键输入模块的加热时间按键和按键自主调节电阻丝加热时间,增加控制系统容错率,更加人性化。
附图说明
22.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
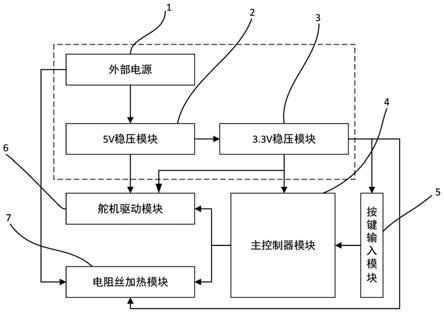
23.图1为本发明的控制系统结构方框图;
24.图2为本发明实施例的系统主控制器模块电路图;
25.图3为本发明实施例的系统第一稳压模块电路图;
26.图4为本发明实施例的系统第二稳压模块电路图;
27.图5为本发明实施例的系统舵机驱动模块电路图;
28.图6为本发明实施例的系统按键输入模块电路图;
29.图7为本发明实施例的系统电阻丝加热模块电路图;
30.其中,1
‑
外部电源,2
‑
第一稳压模块,3
‑
第二稳压模块,4
‑
主控制器模块,5
‑
按键输入模块,6
‑
舵机驱动模块,7
‑
电阻丝加热模块。
具体实施方式
31.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
32.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
33.参照图1所示,本实施例提供一种手持式幼果套袋机的控制系统,包括:外部电源1、第一稳压模块2、第二稳压模块3、主控制器模块4、按键输入模块5、舵机驱动模块6、电阻丝加热模块7。
34.外部电源1用于给第一稳压模块2和电阻丝加热模块7进行供电;第一稳压模块2用于将外部电源1的输入电压进行降压,并对第二稳压模块3、舵机驱动模块6进行供电;第二稳压模块3用于将第一稳压模块2的输入电压进行降压,并对主控制器模块4、按键输入模块5、舵机驱动模块6、电阻丝加热模块7进行供电;按键输入模块5用于输入按键指令,按键指令包括工作模式切换和调整电阻丝加热时间;主控制器模块4用于监测运行状态,并根据按键指令输出响应;舵机驱动模块6用于根据响应驱动舵机运动进行幼果套袋;电阻丝加热模块7用于根据响应对电阻丝进行加热,在操作员将水果放入果袋足够深度后,再次按下握把按钮,下舵机驱动其摆臂使上梁向下摆动至电热丝与果柄避让器发生接触,电热丝通电发热将果袋部分熔化实现热塑缝合,完成幼果套袋。
35.外部电源1锂电池为3组铝壳单体锂电池,电源总电压11.1~12.6v,总容量40ah,电芯循环寿命2500次,持续工作电流120a,瞬间工作电流300a,允许最大充电电流20a,增加了短路保护、过充过放保护及充电均衡功能,且每个单体电芯都有泄压阀设计,极大地提高了电源的使用寿命与安全性。外部电源电池电压为12v,stm32供电电压3.3v,舵机工作电压5v。在实际工作中,5v稳压模块要把电池电压降压至5v,3v稳压模块再从5v降压至3.3v,实现滤波降压。
36.第一稳压模块2对所述第二稳压模块3、舵机驱动模块6进行供电之前对输入电压进行噪声与干扰处理。第一稳压模块2通过btb连接器对第二稳压模块3进行供电;供电电压为5v。第一稳压模块2通过ph2.0端子对舵机驱动模块6进行供电;供电电压为3.3v。
37.第一稳压模块2是外部电源1锂电池和第二稳压模块3的中间环节,用于将外部电源1锂电池的输出电压降压至稳定的5v直流电压,连接舵机和第二稳压模块3;第一稳压模块2采用对噪声与干扰进行处理后的5v稳压电路,核心芯片是ax3071芯片,ax3071芯片是一款降压型pwm控制器,该控制器可驱动双路输出8a(4a 4a)负载电流,设计允许ax3071在9v到40v宽输入电压范围内工作。通过将comp/en引脚逻辑电平拉低来实现外部关断功能,并进入待机模式。外部补偿使反馈控制环路具有良好的线压调整率和负载调整率,且外围设计灵活;ax3071可以工作在cc(恒流输出)或cv(恒压输出)两种模式,过流保护(ocp)电流值可以通过外部电流检测电阻设置;ax3071适用于有限流要求的dc/dc开关电源,该芯片采用msop10封装,需要较少的外部器件。
38.第二稳压模块3将第一稳压模块2输出的5v直流电压降压为稳定的3.3v直流电压,为主控制器模块4、按键输入模块5、舵机驱动模块6及电阻丝加热模块7供电;第二稳压模块3的核心芯片是输出电压为3.3v的正向低压降稳压器ams1117
‑
3.3芯片,ams1117
‑
3.3芯片是一个低漏失电压调整器,它的稳压调整管是由一个pnp驱动的npn管组成的,片内过热切断电路提供了过载和过热保护,以防环境温度造成过高的结温;ams1117系列稳压器有可调版与多种固定电压版,设计用于提供1a输出电流且工作压差可低至1v;在最大输出电流时,ams1117器件的压差保证最大不超过1.3v,并随负载电流的减小而逐渐降低;ams1117的片上微调把基准电压调整到1.5%的误差以内,而且电流限制也得到了调整,以尽量减少因稳压器和电源电路超载而造成的压力。
39.舵机驱动模块6接收来自主控制器模块4输出的pwm波,由第一稳压模块2供电进行控制舵机运动;舵机驱动模块6利用光耦合器芯片pc827来进行开关控制,pc827芯片为双通道线性光耦;当pc827芯片输入端加电信号时,发光器发出光线,照射在受光器上,受光器接
受光线后导通,产生光电流从输出端输出,从而实现了“电
‑
光
‑
电”的转换;普通光电耦合器只能传输数字信号(开关信号),不适合传输模拟信号;线性光电耦合器是一种新型的光电隔离器件,能够传输连续变化的模拟电压或电流信号,这样随着输入信号的强弱变化会产生相应的光信号,从而使光敏晶体管的导通程度也不同,输出的电压或电流也随之不同;pc827光电耦合器不但可以起到反馈作用还可以起到隔离作用。
40.电阻丝加热模块7连接外部电源1锂电池和主控制器模块4、第二稳压模块3;电加热丝采用2mm宽扁带型镍铬发热丝,总电阻约0.3欧,工作时峰值电流约42a,为保证电加热丝工作电流,控制部分采用了b80nf55
‑
06mos管和光耦合器pc127进行开关控制,该mos管耐压值55v,最大允许电流80a,内阻0.005欧,电热丝温度可在100ms内爬升到封口温度要求;pc817光电耦合器广泛用在电脑终端机,可控硅系统设备,测量仪器,影印机,自动售票,家用电器,如风扇,加热器等电路之间的信号传输,使之前端与负载完全隔离,目的在于增加安全性,减小电路干扰,简化电路设计。pc817是常用的线性光藕,在各种要求比较精密的功能电路中常常被当作耦合器件,具有上下级电路完全隔离的作用,相互不产生影响。
41.上述系统组成部分的链接方式为:外部电源1、第一稳压模块2、第二稳压模块3、主控制器模块4依次相连;主控制器模块4分别与舵机驱动模块6、电阻丝加热模块7相连;第一稳压模块2和第二稳压模块3均与舵机驱动模块6相连;第二稳压模块3还分别与按键输入模块5、电阻丝加热模块7相连;按键输入模块5还与主控制器模块4相连;外部电源1还与电阻丝加热模块7相连。
42.参照图2所示,本发明实施例中主控制器模块4的最小系统由stm32f103rct6芯片u1、电阻r1~r5、电容c1~c9、晶体振荡器y1、常开开关rst1及发光二极管d1组成。
43.其中,芯片stm32f103rct6使用高性能的cortex
tm
‑
m332位的risc内核,工作频率为72mhz,内置高速存储器(高达512k字节的闪存和64k字节的sram),包含3个12位的adc、4个通用16位定时器和2个pwm定时器;包含标准的通信接口:多达2个i2c、3个spi、2个i2s、1个sdio、5个usart、一个usb和一个can;arm的cortex
tm
‑
m3处理器是最新一代的嵌入式arm处理器,它为实现mcu的需要提供了低成本的平台、缩减的管脚数目、降低的系统功耗,同时提供卓越的计算性能和先进的中断系统响应;arm的cortex
tm
‑
m3是32位的risc处理器,提供额外的代码效率,在通常8和16位系统的存储空间上发挥了arm内核的高性能;拥有高达512k字节的内置闪存存储器,用于存放程序和数据;外部中断/事件控制器包含19个边沿检测器,用于产生中断/事件请求;每个中断线都可以独立地配置它的触发事件(上升沿或下降沿或双边沿),并能够单独地被屏蔽;有一个挂起寄存器维持所有中断请求的状态。exti可以检测到脉冲宽度小于内部apb2的时钟周期;多达112个通用i/o口连接到16个外部中断线。
44.另外还有片外eeprom/at24c256c芯片u4、电容c19、电阻r18~r19组成;所述芯片u1有引脚vbat、引脚nret、引脚vssa、引脚vdda、引脚vss、引脚vdd、引脚boot0、引脚gnd、引脚pa0~15、引脚pb0~15、引脚pc0~15、引脚pd0~2;所述芯片u4有引脚a0、引脚a1、引脚a3、引脚gnd、引脚vcc、引脚wp、引脚scl、引脚sda;发光二极管d1的正极连接芯片u1的引脚vbat(引脚1),发光二极管d1的负极连接3.3v;晶体振荡器y1并联电阻r3,一端连接芯片u1的引脚pd0(引脚5),另一端连接芯片u1的引脚pd1(引脚6);电容c3一端连接芯片u1的引脚pd0(引脚5),另一端接地;电容c4一端连接芯片u1的引脚pd1(引脚6),另一端接地;电阻r4
一端连接3.3v电压,另一端连接电容c5并接地;电容c5并联电容c6,电容c6接地的一端连接芯片u1的引脚vssa(引脚12),另一端连接芯片u1的引脚vdda(引脚13);电容c8一端同时连接3.3v电源和芯片u1的引脚vdd(引脚19),另一端接地;芯片u1的引脚vss(引脚18)接地;电阻r1一端串联常开开关rest1并接地,电阻r1的另一端连接3.3v电源;芯片u1的引脚nrst(引脚7)连接电阻r1与常开开关rest1之间;常开开关rest1并联电容c2;电阻r5一端连接在芯片u1的pb2(引脚28),另一端接地;芯片u1的引脚vss(引脚31)接地;电容c9一端同时连接3.3v电源和芯片u1的引脚vdd(引脚32),电容c9的另一端接地;芯片u1的引脚vss(引脚63)接地;电容c1一端同时连接3.3v电源和芯片u1的引脚vdd(引脚64),电容c1的另一端接地;电阻r2一端接地,电阻r2的另一端连接芯片u1的引脚boot0(引脚60);芯片u1的引脚vss(引脚47)接地;电容c7一端同时连接3.3v电源和芯片u1的引脚vdd(引脚48),电容c7的另一端接地;芯片u4的引脚a0、引脚a1、引脚a3和引脚gnd接地,引脚vcc连接3.3v电源,引脚wp接地;电容c19一端连接芯片u4的引脚vcc,电容另一端连接芯片u4的引脚wp;芯片u4的引脚scl同时连接芯片u1的引脚pb6(引脚58)和电阻r18的一端;电阻r18的另一端连接3.3v电源;芯片u4的引脚sda同时连接芯片u1的引脚pb7(引脚59)和电阻r19的一端;电阻r19的另一端连接3.3v电源。
45.参照图3所示,本发明实施例中第一稳压模块2是由ax3071芯片u2、电阻r6~r17、电容c10~c18、d4184场效应管q1~q2、电感l1、发光二极管led1~led2组成;所述芯片u1具有引脚vin、引脚comp、引脚fb、引脚sen2、引脚sen1、引脚bs、引脚lx、引脚ug、引脚lg和引脚gnd;电容c13为极性电容,其正极与电阻r8串联连接芯片u1引脚vin,电容c13负极接地;电容c12一端与电阻r3并联连接芯片u2引脚vin,另一端接地;芯片u2引脚vin连接power
‑
in接插件rs1;电阻r10一端与芯片u2引脚sen2连接,另一端接地;电阻r11一端与芯片u2引脚sen1连接,另一端接地;芯片u2引脚ug与电阻r9一端串联,电阻r9另一端与场效应管q1的栅极g连接;芯片u2引脚lx与电阻r7串联,电阻r7另一端与场效应管q1的源极s连接;芯片u2引脚bs与所述电容c11串联,电容c11另一端与场效应管q1的源极s连接;芯片u2引脚lg与电阻r14串联,电阻r9另一端与场效应管q2的栅极g连接;场效应管q2的漏极d连接于场效应管q1的源极s,场效应管q2的源极s接地;场效应管q1的漏极d与电容c10串联并接地,场效应管q1的漏极d同时与power
‑
in接插件rs1连接;发光二极管led1一端与电阻r16串联并接地,发光二极管led1另一端与power
‑
in接插件rs1连接;电阻r12一端与电容c16串联并接地,另一端连接于场效应管q1的源极s并与电感l1的一端并联;电阻r13与电容c15并联后与电感l1的另一端连接,并与芯片u2的引脚fb连接;电容c14为极性电容,其正极与电感l1另一端连接,其负极接地;发光二极管led2一端与电阻r15串联并接地,发光二极管led2另一端与极性电容c14正极连接;芯片u2引脚gnd接地;power
‑
in接插件与外部电源1锂电池连接。
46.参照图4所示,本发明实施例中第二稳压模块3由输出电压为3.3v的正向低压降稳压器ams1117
‑
3.3芯片u3、电容c20~c27、发光二极管led1、电阻r23组成;所述ams1117
‑
3.3芯片u2有引脚out、引脚out、引脚gnd和引脚in;第一稳压模块2通过接插件p1连接所述第二稳压模块3提供5v电源;发光二极管led1与电阻r23串联后与电容c26、电容c27并联,一端与5v电源连接,另一端接地;电容c23与电容c24、电容c25并联后与5v电源连接,电容c23一端连接芯片ams1117
‑
3.3芯片u3引脚in,另一端接地;电容c20与电容c21、电容c22并联后一端连接芯片ams1117
‑
3.3芯片u3引脚out,另一端接地。
47.参照图5所示,本发明实施例中舵机驱动模块6由光耦合器pc827芯片u7、电阻r29~32、和六引脚接插件p2组成;光耦合器pc827芯片u7有8个引脚;pc827芯片u7引脚1与电阻r30一端串联,电阻r30另一端连接3.3v电源;pc827芯片u7引脚2连接主控制器模块4的stm32f103rct6芯片u1的引脚pa0(引脚14);pc827芯片u7引脚3与电阻r32一端串联,电阻r32另一端连接3.3v电源;pc827芯片u7引脚4连接主控制器模块4的stm32f103rct6芯片u1的引脚pa6(引脚22);pc827芯片u7引脚7和引脚5接地;pc827芯片u7引脚6连接接插件p2的引脚4;电阻r31一端连接3.3v电源,另一端连接pc827芯片u7引脚6;pc827芯片u7引脚8连接接插件p2的引脚3;电阻r29一端连接3.3v电源,另一端连接pc827芯片u7引脚8;接插件p2的引脚1和引脚6接地;接插件p2引脚1、引脚2、引脚3连接舵机1;接插件p2引脚4、引脚5、引脚6连接舵机2。
48.参照图6所示,本发明实施例中按键输入模块5连接主控制器模块4和第二稳压模块3;按键输入模块5有四个开关,分别是key1启动开关、key2模式切换开关、key3加热时间 及key4加热时间;key1启动开关用于启动手持式幼果套袋机;key2模式切换开关用于切换套袋机工作模式;套袋机工作模式分别是连续模式和单步模式;key3加热时间 用于增加电阻丝加热时间;key4加热时间—用于减少电阻丝加热时间;led4发光二极管对应连续模式;led5发光二极管对应单步模式;当点击key3加热时间 及key4加热时间时led6会发生响应。
49.按键输入模块5由光耦合器pc827芯片u5~u6、常开开关key1~key4、电容c28~c31、电阻r20~r28、电阻r33~r35、发光二极管led4~led6组成;常开开关key1与电容c28并联后一端连接芯片u5的引脚2,另一端接地;常开开关key2与所述电容c2并联后一端连接芯片u5的引脚4,另一端接地;常开开关key3与电容c30并联后一端连接芯片u6的引脚2,另一端接地;常开开关key4与电容c31并联后一端连接芯片u6的引脚4,另一端接地;电阻r21一端连接3.3v电源,电阻r21的另一端连接芯片u5的引脚1;电阻r24一端连接3.3v电源,电阻r24的另一端连接芯片u5的引脚3;电阻r20一端连接3.3v电源,电阻r20的另一端连接芯片u5的引脚8;所述芯片u5的引脚8连接主控制器模块4的stm32f103rct6芯片u1的引脚pco(引脚8);电阻r22一端连接3.3v电源,电阻r22的另一端连接芯片u5的引脚6;芯片u5的引脚6连接主控制器模块4的stm32f103rct6芯片u1的引脚pc1(引脚9);电阻r26一端连接3.3v电源,电阻r26的另一端连接芯片u6的引脚1;电阻r28一端连接3.3v电源,电阻r28的另一端连接芯片u6的引脚3;电阻r25一端连接3.3v电源,电阻r25的另一端连接芯片u6的引脚8;芯片u6的引脚8连接主控制器模块4的stm32f103rct6芯片u1的引脚pc3(引脚11);电阻r27一端连接3.3v电源,电阻r27的另一端连接芯片u6的引脚6;芯片u6的引脚6连接主控制器模块4的stm32f103rct6芯片u1的引脚pc2(引脚10);电阻r33与发光二极管led4串联后一端连接主控制器模块4的stm32f103rct6芯片u1的引脚pc11(引脚52),另一端连接3.3v电源;电阻r34与发光二极管led5串联后一端连接主控制器模块4的stm32f103rct6芯片u1的引脚pc10(引脚51),另一端连接3.3v电源;电阻r35与发光二极管led6串联后一端连接主控制器模块4的stm32f103rct6芯片u1的引脚pa15(引脚50),另一端连接3.3v电源。
50.参照图7所示,本发明实施例中电阻丝加热模块7由光耦合器pc817芯片u8,b80nf55场效应管q3、电阻r36~r40、电热丝接插件rs2组成;电阻r36一端连接pc817芯片u8的引脚1,电阻r36另一端连接3.3v电源;pc817芯片u8的引脚2连接主控制器模块4的stm32f103rct6芯片u1的引脚pb1(引脚27);电阻r39连接pc817芯片u8的引脚2;电阻r40一
端连接pc817芯片u8的引脚3,电阻r40两端接地;电阻r37一端连接pc817芯片u8的引脚4,电阻r37的另一端连接3.3v电源;电阻r38一端连接pc817芯片u8的引脚4,电阻r37的另一端连接场效应管q3的栅极g连接;场效应管q3的漏极d连接接插件rs2引脚1,接插件rs2引脚连接外部电源1锂电池;场效应管q3的源极s接地。
51.本发明公开了以下技术效果:
52.本发明手持式幼果套袋机的控制系统结构及电路设计合理,可行性高,控制使用方便快捷,具有模式切换功能,用户可通过按键输入模块5的模式切换按键根据自己的需求选择不同的工作模式,工作效率最大化;用户可通过按键输入模块5的加热时间按键和按键自主调节电阻丝加热时间,增加控制系统容错率,更加人性化。
53.应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释,此外,术语“第一”、“第二”、“第三”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
54.最后应说明的是:以上所述实施例,仅为本发明的具体实施方式,用以说明本发明的技术方案,而非对其限制,本发明的保护范围并不局限于此,尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,其依然可以对前述实施例所记载的技术方案进行修改或可轻易想到变化,或者对其中部分技术特征进行等同替换;而这些修改、变化或者替换,并不使相应技术方案的本质脱离本发明实施例技术方案的精神和范围。都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应所述以权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。