1.本发明涉及风力电机鲁棒控制技术领域,主要涉及一种基于自适应非奇异终端滑模观测器的风力机载荷增广预测控制方法。
背景技术:
2.随着风电机组大型化,风力机叶片直径和风轮扫掠面积不断增加,伴随着风切变效应和塔影效应的影响更加显著(文献[1])。由此造成的轮毂不平衡载荷对风力机安全稳定运行十分不利,且会进一步造成输出电压和功率波动。
[0003]
现有技术中一般采用独立变桨距控制技术降低不平衡载荷,如文献[2]所示。独立变桨控制技术是对各个桨距角进行协调控制,缺点是成本高并且实现起来比较复杂。相比于传统的统一变桨距控制,独立变桨距控制技术有效弥补了由于风轮载荷不均匀而产生的抖动和疲劳磨损问题,并且能在某一变桨距执行机构故障的情况下,继续调节其余变桨距执行机构实现风力发电机安全稳定运行。文献[3]使用独立变桨距控制系统对风力发电机载荷进行主动控制,同时在考虑动力学耦合的情况下进行状态空间控制器设计,并使用干扰抑制控制器来消除风扰动对整个系统的影响。文献[4]则针对常规线性变桨距控制方法导致发电机功率产生较大抖动的问题,提出了一种将反馈线性化和互补滑模控制相结合的变速变桨控制方法。文献[5]对于风力发电机现有变桨距和转矩控制器进一步开发协调控制以提高实际应用的有效性,并通过协调调整每个控制子系统中的极点位置。文献[6]采用一种基于自适应的内模控制方法来实现对振动频率的识别并自适应地调节阻尼器和控制器参数进而降低风力发电机的疲劳载荷。文献[7]设计了风力发电机预测控制器(mpc),所设计的预测控制算法在满足所施加约束的同时,可以实现单独的变桨距控制目标。文献[8]为了使独立变桨距控制真正有效,综合考虑了风轮组件之间复杂的动态耦合。
[0004]
上述现有技术中均未考虑状态估计,并且执行机构约束并未直接融入控制器的设计中,这对于提高控制器的控制效果和可靠性是不利的。
[0005]
由于实际系统中存在各种不确定性,现有的控制方法可以处理系统不确定性问题,但前提是在选择参数之前须预知系统不确定性上界。然而,在实际工程设计中,要知道系统不确定性的界是不现实的,这就给参数选择带来了困难,需要设计多目标优化算法对控制器参数进行寻优。现有技术中的多目标优化算法包括多目标差分进化算法(mode)[9]、多目标遗传算法(moga)[10]、多目标粒子群算法(mopso)[11]和多目标灰狼优化算法(mogwo)[12]等。文献[13]利用mopso对隶属度函数值及控制规则进行优化以获得更好的控制效果。文献[14]基于moga对径向基函数神经网络进行寻优,实现对车门结构的精确建模。文献[15]针对传统的粒子群优化算法需设置参数较多且粒子位置变化缺乏随机性的问题,通过改进量子粒子群算法减少了参数设置并提高了算法性能。文献[16]运用mogwo实现了对输入电流谐波的有效抑制和对直流侧储能电容电压的有效控制。文献[17]分别通过借鉴人工蜂群算法中的搜索策略和控制参数非线性调整策略,提高了mogwo算法的稳定性和避免陷入局部最优的能力。
[0006]
[1]孔屹刚,王杰,顾浩等.大型风力机气动载荷分析与功率控制[j].太阳能学报,2012,33(06):1023
‑
1029.
[0007]
[2]bossanyi e a.further load reductions with individual pitch control[j].wind energy:an international journal for progress and applications in wind power conversion technology,2005,8(4):481
‑
485.
[0008]
[3]novaes menezes e j,araujo am,rohatgi j s,et al.active load control of large wind turbines using state
‑
space methods and disturbance accommodating control[j].energy,2018,150:310
‑
319.
[0009]
[4]gui k,cen l,liu f.complementary sliding mode control for variable speed variable pitch wind turbine based on feedback linearization[c].2020 chinese control and decision conference(ccdc),china,2020.
[0010]
[5]lin z,chen z,wu q,et al.coordinated pitch&torque control of large
‑
scale wind turbine based on pareto efficiency analysis[j].energy,2018,147:812
‑
825.
[0011]
[6]mohammadi e,fadaeinedjad r,moschopoulos g.implementation of internal model based control and individual pitch control to reduce fatigue loads and tower vibrations in wind turbines[j].journal of sound and vibration,2018,421:132
‑
152.
[0012]
[7]petrovi v,jelavi m,baoti m.mpc framework for constrained wind turbine individual pitch control[j].wind energy,2020,1
‑
15.
[0013]
[8]yuan y,chen x,tang j.multivariable robust blade pitch control design to reject periodic loads on wind turbines[j].renewable energy,2020,146:329
‑
341.
[0014]
[9]sarker r,abbass h a.differential evolution for solving multi
‑
objective optimization problems[j].asia
‑
pacific journal of operational research,2004,21(02):225
‑
240.
[0015]
[10]deb k.multi
‑
objective genetic algorithms:problem difficulties and construction of test problems[j].evolutionary computation,1999,7(3):205
‑
230.
[0016]
[11]coello c a c,pulido g t,lechuga m s.handling multiple objectives with particle swarm optimization[j].ieee trans on evolutionary computation,2004,8(3):256
‑
279.
[0017]
[12]mirjalili s,saremi s,mirjalili s m,et al.multi
‑
objective grey wolf optimizer:a novel algorithm for multi
‑
criterion optimization[j].expert systems with applications,2015,47:106
‑
119.
[0018]
[13]林歆悠,王召瑞.应用粒子群算法优化模糊规则的自适应多目标控制策略[j/ol].控制理论与应用:1
‑
8[2021
‑
02
‑
05].
[0019]
[14]王凯迪,李迪,冷杨松等.基于径向基函数神经网络模型的车门结构多目标优化[j].山东理工大学学报(自然科学版),2021,35(02):77
‑
82.
[0020]
[15]李星辰,袁旭峰,李沛然等.基于改进qpso算法的微电网多目标优化运行策略
[j].电力科学与工程,2020,36(12):22
‑
29.
[0021]
[16]陈玉升,肖玲斐,丁润泽.运用多目标灰狼优化的航空有源ac/dc变换器研究[j].重庆理工大学学报(自然科学),2018,32(10):179
‑
184.
[0022]
[17]崔明朗,杜海文,魏政磊等.多目标灰狼优化算法的改进策略研究[j].计算机工程与应用,2018,54(5):156
‑
164.
技术实现要素:
[0023]
发明目的:针对上述背景技术中存在的不足,本发明提供了一种基于滑模观测器的风力机载荷预测控制方法,考虑状态估计,并将执行机构的约束融入控制器设计,同时针对mogwo解决复杂问题时全局搜索能力弱和mopso易陷入局部最优等不足的问题,将mopso的速度和位置分量引入到mogwo中,提出了改进的多目标变速灰狼优化算法,进一步对控制器进行参数寻优。
[0024]
技术方案:为实现上述目的,本发明采用的技术方案为:
[0025]
一种基于滑模观测器的风力机载荷预测控制方法,包括如下步骤:
[0026]
步骤s1、基于风切变效应、塔影效应和风湍流影响建立风速模型,同时建立风力机多变量独立变桨距系统模型;具体地,建立风速模型的具体步骤包括:
[0027]
步骤s1.1、采用指数模型计算风切变风速如下:
[0028][0029]
其中,h0为已知风速点高度;h
w
为未知风速点高度;代表测量点高度为h0处的风速;代表测量点高度为h
w
处的风速;n为风切变指数;
[0030]
步骤s1.2、考虑塔影效应,对于上风向的风电机组,处于塔影坐标系内与叶轮平面垂直的某点风速为:
[0031][0032][0033]
其中,v0为空间平均风速;a
t
为塔架半径;y为叶片微元到塔架轴线的y轴方向距离;x为叶片微元到塔架轴线的x轴方向距离;v
t
(y,x)为塔影效应对风速施加的扰动变化;v(y,x)为塔影坐标系内与叶轮平面垂直的某点风速;
[0034]
步骤s1.3、考虑风湍流影响,冯卡曼谱表达式如下:
[0035][0036]
其中,f为频率;t
v
为湍流频带宽度;k
v
为湍流能量;φ(f)为谱的长度;
[0037]
建立风力机多变量独立变桨距系统模型具体步骤包括:
[0038]
步骤l1.1、对风力机运行工况和载荷模型进行线性简化处理;化简后的多变量独立变桨距系统状态方程和输出方程如下:
[0039][0040]
y(t)=cx(t) du
cm
(t) d
d
d
cm
(t)
[0041]
其中,为状态变量;为状态变量的一阶导数;y=[m
tilt m
yaw
]
t
为输出变量;为控制输入变量;为扰动变量;a、b、b
d
、c、d、d
d
分别为系数矩阵,具体如下:
[0042][0043][0044]
其中,h
fx
、h
mz
、k
mz
是经线性化处理后的系数;x
fa
是塔架俯仰位移;是塔架俯仰速度;h是塔架高度;m
tilt
是俯仰力矩;m
yaw
是偏航力矩;m
t
是塔架等效质量;b
t
是塔架等效阻尼;k
t
是塔架等效弹性系数;是轮毂固定坐标系上的桨距角;是轮毂固定坐标系上的风速;r
b
是桨距角风轮半径。
[0045]
步骤s2、将指令跟踪误差与系统状态的变化量增广为状态向量,设计增广预测模型,消除稳态跟踪误差;
[0046]
步骤s3、利用自适应非奇异终端滑模观测器对系统状态进行估计,提升控制器的控制精度;
[0047]
步骤s4、采用基于改进的多目标变速灰狼优化算法对控制器参数进行寻优。
[0048]
进一步地,步骤s2中增广预测模型设计包括以下步骤:
[0049]
步骤s2.1、基于步骤s1中建立的风力机多变量独立变桨距系统模型,为了获取增广预测模型,需要满足d=0和dd=0,则系统模型转化如下:
[0050][0051]
y(t)=cx(t)
[0052]
步骤s2.2、对上述模型进行增广可得:
[0053][0054]
y(t)=cx(t)
[0055]
其中,b
c
=[b b
d
],u
c
(t)=[u
cm
(t) d
cm
(t)]
t
;
[0056]
步骤s2.3、将上述增广模型进行离散化可得:
[0057]
x(k 1)=a
d
x(k) b
cd
u
c
(k)
[0058]
y(k)=cx(k)
[0059]
其中,t
s
是系统采样时间;x(k)是当前时刻离散状态量;x(k 1)是下一时刻离散状态量;u
c
(k)是当前时刻离散控制输入变量;y(k)是当前时刻离散输出变量;
[0060]
步骤s2.4、对上述离散化模型取后向差分得:
[0061]
x(k)=a
d
x(k
‑
1) b
cd
u
c
(k
‑
1)
[0062]
其中,x(k
‑
1)是上一时刻离散状态量;u
c
(k
‑
1)是上一时刻离散控制输入变量;
[0063]
将差分结果与离散化模型作差可得:
[0064]
δx(k 1)=a
d
δx(k) b
cd
δu
c
(k)
[0065]
其中,δx(k)是当前时刻离散状态变化量;δx(k 1)是下一时刻离散状态变化量;
[0066]
步骤s2.5、定义期望的输出为r(k),定义输出误差为:
[0067]
e(k)=y(k)
‑
r(k)
[0068]
其中,r(k)是当前时刻离散期望输出;e(k)是当前时刻离散输出误差;由上式可得:
[0069]
e(k 1)=e(k) ca
d
δx(k) cb
cd
δu
c
(k)
‑
δr(k 1)
[0070]
其中,e(k 1)是下一时刻离散输出误差;δu
c
(k)是当前时刻离散控制输入变化量;δr(k 1)是下一时刻离散期望输出变化量;
[0071]
步骤s2.6、将所述系统输出与期望输出之差e(k)增广为状态量,定义新的状态变量z(k)如下:
[0072][0073]
其中,z(k)是当前时刻增广状态量;
[0074]
根据步骤s2.4
‑
s2.6可得新的系统如下:
[0075][0076]
其中,z(k 1)是下一时刻增广状态量;分别为系数矩阵,满足分别为系数矩阵,满足和
[0077]
对上述系统设计控制器,满足即可实现消除稳态误差的目标;
[0078]
步骤s2.7、基于上述系统,获得多步预测的向量形式如下:
[0079]
z=fz(k) gδu
c
(k) sδr(k)
[0080]
其中,z为状态变量的向量形式;δu
c
(k)为离散控制输入变化量的向量形式;δr(k)为离散期望输出变化量的向量形式;f、g、s为多步预测方程的系数矩阵,具体如下表示:
[0081][0082][0083]
[0084]
基于步骤s2.2提供的输出方程进一步预测k 1到k p时刻的被控输出,系统未来p步预测的输出如下:
[0085]
y(k)=px(k) hu
c
(k) tδu
c
(k)
[0086]
其中,y为输出变量的向量形式;p、h、t为多步预测方程的系数矩阵,满足:
[0087][0088][0089]
步骤s2.8、考虑存在风速扰动的情况下,寻找最优控制律序使目标函数满足:
[0090][0091]
其中,q=diag(q1,q2,
…
,q
p
}、r=diag{r1,r2,
…
,r
m
},分别代表权重矩阵;
[0092]
对桨距角的大小和变化率施加约束,只考虑控制量约束和控制量增量约束,则变桨控制器时域约束条件为:
[0093][0094]
进一步地,所述步骤s3中自适应非奇异终端滑模观测器建立步骤如下:
[0095]
步骤s3.1、针对风力发电机模型进行自适应滑模观测器设计;当状态估计误差处于滑动模态时,通过高频滑模切换项进行故障重构;基于步骤s2.1所述的转化系统模型,设计滑模观测器如下:
[0096][0097][0098]
其中,是滑模观测器的输出估计;是滑模观测器的状态估计;是滑模观测器状态估计的一阶导数;l是滑模观测器增益;v是滑模切换项;
[0099]
步骤s3.2、将上述滑模观测器与步骤s2.1所述转化系统模型作差,得到观测器状态估计误差如下:
[0100]
[0101]
其中,是滑模观测器的状态估计误差;是滑模观测器状态估计误差的一阶导数;
[0102][0103]
其中,λ、σ是正奇数且满足1<λ/σ<2;β、k是正常数;k(t)是自适应律;s是滑模观测器的非奇异终端滑模面;是系数矩阵b
d
的伪逆;sgn(
·
)是符号函数;代表滑模切换项的一阶导数;进一步地,
[0104][0105]
其中,是自适应律的一阶导数;a是自适应律增益系数;
[0106]
滑模观测器的非奇异终端滑模面s设计如下:
[0107][0108]
自适应律增益系数a设计如下:
[0109][0110]
进一步地,所述步骤s4中基于改进的多目标变速灰狼优化算法对控制器参数进行寻优,具体步骤如下:
[0111]
步骤s4.1、基于降低桨距角变化和风力机载荷的目标,分别设计对应的目标函数如下:
[0112][0113][0114]
其中,β2(t)、β
s
(t)是桨距角;是目标函数的系数;j1、j2依次是与降低桨距角变化和风力机载荷对应的目标函数;
[0115]
所述多目标变速灰狼优化算法如下:
[0116]
步骤s4.2、灰狼包围猎物,如下所示:
[0117][0118]
其中,k是迭代次数;和是系数向量;是猎物所在的位置;是灰狼所在的位置;为灰狼与猎物之间的距离;和具体如下表示:
[0119][0120]
其中,控制参数h在范围[0,2]内线性变化;和是随机向量,取值范围为[0,1];
[0121]
步骤s4.3、灰狼捕食猎物,如下所示:
[0122][0123]
其中,分别为灰狼α
gwo
、β
gwo
、δ
gwo
当前所在位置;当前所在位置;为算法系数;分别为灰狼α
gwo
、β
gwo
、δ
gwo
与猎物之间的距离;所述代表遍历狼群中每只灰狼的位置;
[0124]
步骤s4.4、定义灰狼ω
gwo
相对于灰狼α
gwo
、β
gwo
、δ
gwo
的前进方向和步长如下:
[0125][0126]
其中,分别为灰狼ω
gwo
相对于灰狼α
gwo
、β
gwo
、δ
gwo
的前进向量;分别为算法系数;则灰狼ω
gwo
的最终位置如下:
[0127][0128]
所述多目标灰狼优化算法使用外部种群archive存储当前非支配解,将网格机制引入到单目标灰狼优化算法中改善外部种群archive中的非支配解,并从外部种群archive中选择头狼α
gwo
、β
gwo
和δ
gwo
;所述头狼选择机制采用轮盘赌的形式,每一个个体被选择的概率与个体所在组的个体数成反比,具体如下所示:
[0129][0130]
其中,c
a
是大于1的常数;n
j
是该个体所在组的个体总数;pr
j
是每一个个体被选择的概率;
[0131]
步骤s4.5、将多目标粒子群优化算法的速度和位置分量引入到多目标灰狼优化算法中,融合后的速度和位置分量更新公式如下:
[0132][0133][0134]
其中,是第i个灰狼的速度;是第i个灰狼的当前位置;c1、c2、c3是学习因子且满足c1,c2,c3∈[0,1];ζ是惯性因子。
[0135]
本发明针对风力发电机独立变桨距载荷控制问题,提出了一种基于自适应非奇异终端滑模观测器的风力机载荷增广预测控制方法。相比于现有技术,优势在于:
[0136]
(1)针对模型不匹配导致的模型预测控制性能下降的问题,将指令跟踪误差与系统状态的变化量增广为状态向量,设计了增广预测模型以消除稳态跟踪误差。
[0137]
(2)设计了自适应非奇异终端滑模观测器对系统状态进行估计,以改善控制效果并提高控制系统的可靠性。
[0138]
(3)结合多目标灰狼算法解决复杂问题时局部搜索能力强和多目标粒子群算法收敛速度快、全局搜索能力强等优点,本文将多目标粒子群算法的速度和位置分量引入到多目标灰狼算法中,获得收敛速度快、求解精度高和全局搜索能力强的多目标变速灰狼优化算法。
附图说明
[0139]
图1a为本发明实施例中的风力机的拍打示意图;
[0140]
图1b为本发明实施例中的风力机的挥舞示意图;
[0141]
图2为本发明实施例中的全局风速仿真图;
[0142]
图3为本发明实施例中的湍流风速仿真图;
[0143]
图4为本发明实施例中的组合全局风速仿真图;
[0144]
图5为本发明实施例中的风力机载荷示意图;
[0145]
图6为本发明提供的风力机载荷增广预测控制方法原理图;
[0146]
图7为本发明实施例中的pareto前沿解集对比图;
[0147]
图8为本发明实施例中叶片2桨距角控制效果对比图;
[0148]
图9为本发明实施例中叶片3桨距角控制效果对比图;
[0149]
图10为本发明实施例中塔架俯仰位移控制效果对比图;
[0150]
图11为本发明实施例中塔架俯仰速度控制效果对比图;
[0151]
图12为本发明实施例中俯仰力矩控制效果对比图;
[0152]
图13为本发明实施例中偏航力矩控制效果对比图;
[0153]
图14为本发明实施例中塔架俯仰位移观测效果对比图;
[0154]
图15为本发明实施例中塔架俯仰速度观测效果对比图;
[0155]
图16为本发明实施例的滑模自适应律对比图;
具体实施方式
[0156]
下面结合附图提供一份具体实施例,对本发明作更进一步的说明。
[0157]
一种基于滑模观测器的风力机载荷预测控制方法,包括如下步骤:
[0158]
步骤s1、基于风切变效应、塔影效应和风湍流影响建立风速模型,同时建立风力机多变量独立变桨距系统模型。
[0159]
由于风切变效应、塔影效应和风湍流等因素会使风轮平面内的风速分布不均,进而使风力发电机产生不均衡载荷。实际上自然界的风在空间和时间上都是多变的,风力机叶片的拍打和挥舞振动由此产生,如图1a
‑
1b所示。
[0160]
风切变效应是指在垂直方向上风速随高度的增加而增大。风速沿高度的变化规律称为风速廓线,本发明在计算风切变风速时选用指数模型,即:
[0161][0162]
其中,h0为已知风速点高度;h
w
为未知风速点高度;代表测量点高度为h0处的风速;代表测量点高度为h
w
处的风速;n为风切变指数。
[0163]
塔影效应是指由于塔架对气流的堵塞,来流速度有所减小的现象。考虑塔影效应,
对于上风向的风电机组,处于塔影坐标系内与叶轮平面垂直的某点风速为:
[0164][0165][0166]
其中,v0为空间平均风速;a
t
为塔架半径;y为叶片微元到塔架轴线的y轴方向距离;x为叶片微元到塔架轴线的x轴方向距离;v
t
(y,x)为塔影效应对风速施加的扰动变化;v(y,x)为塔影坐标系内与叶轮平面垂直的某点风速。
[0167]
综合考虑风切变效应和塔影效应的影响,可得全局风速仿真如图2所示。相关参数选取如下:轮毂平均速度风轮半径r
b
=11.2086m,轮毂中心高度h0=19.157m,风切变指数n=0.2。
[0168]
风湍流无时无刻都存在于系统的各个部分。考虑风湍流影响,本发明采用冯卡曼谱描述湍流模型,冯卡曼谱表达式如下:
[0169][0170]
其中,f为频率;t
v
为湍流频带宽度;k
v
为湍流能量;φ(f)为谱的长度。仿真结果如图3所示。其中,两个常数近似如下:
[0171][0172][0173]
其中,l
v
为湍流相关长度;σ
v
为风速的湍流强度;v
m
(z)为稳态平均风速;l
v
和σ
v
由地形条件和风速测量经验值确定。
[0174]
综合考虑风切变效应、塔影效应和风湍流影响,可得组合全局风速模型,如图4所示。
[0175]
本发明采用风力机多变量独立变桨距系统模型。独立变桨距控制既要实现功率控制,又要实现载荷控制,风力机载荷如图5所示。因此需要对风力机运行工况和载荷模型进行线性简化处理。
[0176]
风力机关于风轮方位角的线性时不变方程如下所示:
[0177][0178][0179][0180][0181][0182]
其中,h
my
、h
fx
、h
mx
、h
fy
、k
my
、k
fx
、k
mx
、k
fy
是工作点附近线性化处理后的系数;x
fa
是塔架项部前后方向位移;h是塔架高度;m
tilt
是俯仰力矩;m
yaw
是偏航力矩;ω
r
是风轮转速;b是塔架等效阻尼;t
g
是发电机转矩;m
t
是塔架等效质量;b
t
是塔架等效阻尼;k
t
是塔架等效弹性
系数;是轮毂固定坐标系上的桨距角;是轮毂固定坐标系上的桨距角;是轮毂固定坐标系上的风速;是风轮及传动系统折算到风轮上的转动惯量;n1、n2、
…
、n
n
、j1、j2、
…
、j
n
是传动系统各级传动比及转动惯量;r
b
是桨距角风轮半径。
[0183]
由式(8)(10)和(11)可实现多变量独立变桨距控制,化简后的多变量独立变桨距系统状态方程和输出方程如下:
[0184][0185]
y(t)=cx(t) du
cm
(t) d
d
d
cm
(t)
ꢀꢀ
(12)
[0186]
其中,为状态变量;为状态变量的一阶导数;y=[m
tilt m
yaw
]
t
为输出变量;为控制输入变量;为扰动变量;a、b、b
d
、c、d、d
d
分别为系数矩阵,具体如下:
[0187][0188][0189]
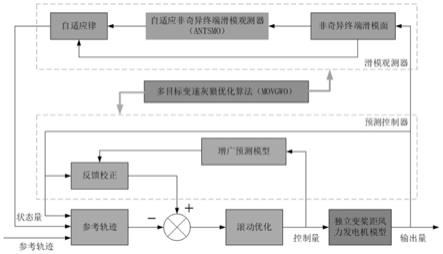
本发明所提控制策略包含自适应非奇异终端滑模观测器(antsmo)、载荷增广预测控制(ampc)和多目标变速灰狼优化算法(movgwo)的设计三部分。首先,针对模型不匹配导致的模型预测控制性能下降的问题,将指令跟踪误差与系统状态的变化量增广为状态向量,设计增广预测模型以消除稳态跟踪误差;其次,利用antsmo对系统状态进行估计,以提高控制器的控制精度和可靠性;最后,基于movgwo对控制器参数进行优化,控制原理如图6所示。具体地,
[0190]
步骤s2、针对模型不匹配导致的模型预测控制性能下降的问题,将指令跟踪误差与系统状态的变化量增广为状态向量,设计增广预测模型以消除稳态跟踪误差。
[0191]
步骤s2.1、基于步骤s1中建立的风力机多变量独立变桨距系统模型,为了获取增广预测模型,需要满足d=0和dd=0,则系统模型转化如下:
[0192][0193]
y(t)=cx(t)
ꢀꢀ
(13)
[0194]
步骤s2.2、对式(13)进行增广可得:
[0195][0196]
y(t)=cx(t)
ꢀꢀ
(14)
[0197]
其中,b
c
=[b b
d
],u
c
(t)=[u
cm
(t) d
cm
(t)]
t
。
[0198]
步骤s2.3、将上述增广模型(14)进行离散化可得:
[0199]
x(k 1)=a
d
x(k) b
cd
u
c
(k)
[0200]
y(k)=cx(k)
ꢀꢀ
(15)
[0201]
其中,t
s
是系统采样时间;x(k)是当前时刻离散状态量;x(k 1)是下一时刻离散状态量;u
c
(k)是当前时刻离散控制输入变量;y(k)是当前时刻离散输出变量。
[0202]
步骤s2.4、对上述离散化模型(15)取后向差分得:
[0203]
x(k)=a
a
x(k
‑
1) b
cd
u
c
(k
‑
1)
ꢀꢀ
(16)
[0204]
其中,x(k
‑
1)是上一时刻离散状态量;u
c
(k
‑
1)是上一时刻离散控制输入变量。将差分结果(16)与离散化模型(15)作差可得:
[0205]
δx(k 1)=a
d
δx(k) b
cd
δu
c
(k)
ꢀꢀ
(17)
[0206]
其中,δx(k)是当前时刻离散状态变化量,δx(k 1)是下一时刻离散状态变化量。
[0207]
步骤s2.5、定义期望的输出为r(k),定义输出误差为:
[0208]
e(k)=y(k)
‑
r(k)
ꢀꢀ
(18)
[0209]
其中,r(k)是当前时刻离散期望输出;e(k)是当前时刻离散输出误差;由上式可得:
[0210]
e(k 1)=e(k) ca
d
δx(k) cb
cd
δu
c
(k)
‑
δr(k 1)
ꢀꢀ
(19)
[0211]
其中,e(k 1)是下一时刻离散输出误差,δu
c
(k)是当前时刻离散控制输入变化量,δr(k 1)是下一时刻离散期望输出变化量。
[0212]
步骤s2.6、为了满足跟踪控制中无稳态误差的要求,将所述系统输出与期望输出之差e(k)增广为状态量,定义新的状态变量z(k)如下:
[0213][0214]
其中,z(k)是当前时刻增广状态量。
[0215]
根据上式(17)、(19)和(20)可得新的系统如下:
[0216][0217]
其中,z(k 1)是下一时刻增广状态量;分别为系数矩阵,满足分别为系数矩阵,满足和
[0218]
对上述系统设计控制器(21),满足即可实现消除稳态误差的目标。
[0219]
步骤s2.7、以最新测量值为初始条件,基于模型(21)预测系统未来的动态。为此,设定预测时域为p,控制时域为m,且m≤p。为了推导系统的预测方程,需做出以下假设:
[0220]
假设1:在控制时域m之外,控制量不变,即δu(k i)=0,i=m,m 1,
…
,p
‑
1。
[0221]
基于模型(21)和假设1可预测k 1到k p时刻的状态,归纳可得多步预测的向量形式为:
[0222]
z=fz(k) gδu
c
(k) sδr(k)
ꢀꢀ
(22)
[0223]
其中,z为状态变量的向量形式;δu
c
(k)为离散控制输入变化量的向量形式;δr(k)为离散期望输出变化量的向量形式;f、g、s为多步预测方程的系数矩阵,具体如下表示:
[0224]
[0225][0226][0227]
基于式(13)的输出方程进一步预测k 1到k p时刻的被控输出,系统未来p步预测的输出如下:
[0228]
y(k)=px(k) hu
c
(k) tδu
c
(k)
ꢀꢀ
(23)
[0229]
其中,t为输出变量的向量形式;p、h、t为多步预测方程的系数矩阵,满足:
[0230][0231][0232]
步骤s2.8、目标函数的选取反映了对系统性能的要求,本发明所考虑的带约束风力机载荷预测控制问题可以描述为:目标是在存在风速扰动的情况下,寻找最优控制律序使目标函数满足:
[0233][0234]
其中,q=diag{q1,q2,
…
,q
p
}、r=diag{r1,r2,
…
,r
m
},分别代表权重矩阵。
[0235]
由于变桨距执行机构的调节幅度和调节速率有限,因此需要对桨距角的大小和变化率施加约束。本发明只考虑控制量约束和控制量增量约束。变桨控制器的时域约束条件
为:
[0236][0237]
二次规划问题指的是约束为线性,目标函数为二次函数的优化问题。二次规划的数学模型为:
[0238][0239]
其中,h、a、a
eq
是矩阵;f
b
、b、b
eq
、lb、ub、x是向量。
[0240]
将式(22)代入式(24)中,令e=fz sδr可得:
[0241][0242]
其中,e
t
qe是常量,可忽略,则:
[0243][0244]
与式(26)对应可得:
[0245]
h=2(g
t
qg r)
[0246][0247]
将约束条件(25)转化为二次规划标准型可得:
[0248][0249]
其中,矩阵分别满足
[0250][0251]
步骤s3、利用自适应非奇异终端滑模观测器对系统状态进行估计,以提高控制器的控制精度和可靠性,具体如下:
[0252]
步骤s3.1、针对风力发电机模型进行自适应滑模观测器设计。antsmo结合了非奇异终端滑模收敛速度快和自适应控制有效削弱抖振的优点,可以有效提高观测精度。本发明分别从自适应律和观测器稳定性证明两个角度对自适应非奇异终端滑模观测器进行设计。当状态估计误差处于滑动模态时,通过高频滑模切换项来进行故障重构。针对转化系统模型(13),设计滑模观测器如下:
[0253][0254][0255]
其中,是滑模观测器的输出估计;是滑模观测器的状态估计;是滑模观测器状态估计的一阶导数;l是滑模观测器增益;v是滑模切换项。
[0256]
将式(31)与式(13)作差,则观测器状态估计误差为:
[0257][0258]
其中,是滑模观测器的状态估计误差;是滑模观测器状态估计误差的一阶导数;
[0259][0260]
其中,λ、σ是正奇数且满足1<λ/σ<2;β、k是正常数;k(t)是自适应律;s是滑模观测器的非奇异终端滑模面;是系数矩阵b
d
的伪逆;sgn(
·
)是符号函数;代表滑模切换项的一阶导数;进一步地,
[0261][0262]
其中,是自适应律的一阶导数;a是自适应律增益系数;
[0263]
滑模观测器的非奇异终端滑模面s设计如下:
[0264][0265]
自适应律增益系数a设计如下:
[0266][0267]
下面对所述滑模观测器进行稳定性证明。基于以下假设:
[0268]
假设2:令a0=(a
‑
lc),对于上述系统存在合适维度的增益矩阵l,使得a0为稳定矩阵,且存在对称正定矩阵p1和q1,满足:
[0269]
(a
‑
lc)
t
p1 p1(a
‑
lc)=
‑
q1ꢀꢀ
(37)
[0270]
假设3:扰动满足||d
cm
||≤γ和扰动变化率满足其中,γ为已知常数;δ为未知常数。
[0271]
假设4:状态观测误差满足且σ已知。
[0272]
提出以下定理:
[0273]
定理1:若设计的非奇异终端滑模观测器参数满足:
[0274]
k>||a
‑
lc||σ
ꢀꢀ
(38)
[0275]
则所设计的滑模观测器(31)渐近稳定。
[0276]
证明:
[0277]
选取lyapunov函数为:
[0278][0279]
对上式求导可得:
[0280][0281]
已知λ和σ为正奇数且满足1<λ/σ<2,则λ
‑
σ为正偶数。对一个数进行偶数次方然后开奇数次方得到的数必定为正数,因此可得:
[0282][0283]
由式(32)得观测器状态估计误差二阶导数为:
[0284]
[0285]
将式(42)代入式(40)可得:
[0286][0287]
将式(33)代入式(43)可得:
[0288][0289]
将式(34)和(36)代入(44)可得:
[0290][0291]
其中,||
·
||是向量的模;
[0292]
已知s
t
sgn(s)=||s||,则可得:
[0293][0294]
将式(38)代入式(46)可得
[0295]
下面进一步提供混合非奇异终端滑模观测器设计,分别从观测器设计和稳定性证明两个角度对混合非奇异终端滑模观测器(hntsmo)进行设计证明。
[0296]
针对模型(13)设计滑模观测器如下:
[0297][0298]
将式(47)与(13)相减,则观测器状态估计误差为:
[0299][0300]
其中,是滑模观测器状态误差;v是滑模控制律。
[0301][0302]
其中,l
g
>0;η>0;
[0303]
设计混合非奇异终端滑模面如下:
[0304][0305]
其中,c>0;p
o
,q
o
,r,d均为奇数。
[0306]
基于下述假设和定理,对滑模观测器稳定性进行证明:
[0307]
假设5:扰动变化率有界,即满足扰动的
[0308]
定理2:对于系统(13),当滑模控制律满足(49)时,滑模观测器(47)可在有限时间内到达滑模面(50),并保持在滑模面上,系统扰动由控制律(49)估计。
[0309]
证明:
[0310]
选取lyapunov函数为:
[0311][0312]
对式(51)求导可得:
[0313][0314]
由式(48)可得:
[0315][0316]
将式(53)代入式(52)可得:
[0317][0318]
对式(49)求导可得:
[0319][0320]
将式(55)代入式(54)可得:
[0321][0322]
其中,t
t
是中间变量;
[0323]
根据假设5可知:
[0324][0325]
由式(57)可知因此估计误差可在有限时间内到达滑模面并保持在滑模面上。
[0326]
步骤s4、采用基于改进的多目标变速灰狼优化算法对控制器参数进行寻优。
[0327]
受风力发电机变桨距执行机构机械条件的制约,桨距角的调节范围和速度应尽可能地小;同时结合本发明风力发电机载荷控制的目标,应尽量降低风轮不平衡载荷。经分析可知,减少变桨距执行机构作动和降低风力发电机载荷存在一定程度的相互制约,传统的单目标优化算法无法满足优化需要,因此本发明设计了多目标变速灰狼优化算法进行寻优。结合本发明控制目标即降低桨距角变化和风力机载荷,设计相应的目标函数分别为:
[0328][0329][0330]
其中,β2(t)、β3(t)是叶片2和3桨距角;是目标函数的系数;j1、j2依次是与降低桨距角变化和风力机载荷对应的目标函数。
[0331]
灰狼优化算法(gwo)是一种新的启发式算法。灰狼优化算法通过4种类型的灰狼(α
gwo
,β
gwo
,δ
gwo
和ω
gwo
)模拟等级制度和跟踪、包围、追捕和攻击猎物来模拟捕捉猎物的行为
进而达到寻优目标。通常,α
gwo
的位置被视为最优解,β
gwo
和δ
gwo
的位置被视为第二个和第三个最优解,同时认为ω
gwo
位置是候选解。灰狼优化算法具体步骤如下:
[0332]
步骤s4.1、灰狼包围猎物,如下所示:
[0333][0334]
其中,k是迭代次数;和是系数向量;是猎物所在的位置;是灰狼所在的位置;为灰狼与猎物之间的距离;和具体如下表示:
[0335][0336]
其中,控制参数h在范围[0,2]内线性变化;和是随机向量,取值范围为[0,1]。
[0337]
步骤s4.2、灰狼捕食猎物,如下所示:
[0338][0339]
其中,分别为灰狼α
gwo
、β
gwo
、δ
gwo
当前所在位置;当前所在位置;为算法系数;分别为灰狼α
gwo
、β
gwo
、δ
gwo
与猎物之间的距离。代表遍历狼群中每只灰狼的位置。
[0340]
步骤s4.3、定义灰狼ω
gwo
相对于灰狼α
gwo
、β
gwo
、δ
gwo
的前进方向和步长如下:
[0341][0342]
其中,分别为灰狼ω
gwo
相对于灰狼α
gwo
、β
gwo
、δ
gwo
的前进向量;分别为算法系数;则灰狼ω
gwo
的最终位置如下:
[0343][0344]
相对于单目标灰狼优化算法,多目标灰狼优化算法主要进行了三方面改动:(1)使用外部种群archive存储当前非支配解;(2)将网格机制引入到单目标灰狼优化算法中改善外部种群archive中的非支配解;(3)提出了一种新的适用于多目标优化的领导者选择策略,从外部种群archive中选择头狼α
gwo
、β
gwo
和δ
gwo
。其中,头狼选择机制仍采用轮盘赌的形式,为了提高算法的探索能力,每一个个体被选择的概率与个体所在组的个体数成反比,具体如下所示:
[0345][0346]
其中,c
a
是大于1的常数;n
j
是该个体所在组的个体总数;pr
j
是每一个个体被选择的概率。
[0347]
步骤s4.4、为了在mogwo的基础上对其进行改进,本发明将mopso的速度和位置分量引入到mogwo中,作为新的基于改进的多目标变速灰狼优化算法(movgwo)以更好的弥补灰狼优化算法的不足。
[0348]
融合后的速度和位置分量更新公式如下:
[0349][0350][0351]
其中,是第i个灰狼的速度;是第i个灰狼的当前位置;c1、c2、c3是学习因子且满足c1,c2,c3∈[0,1];ζ是惯性因子。
[0352]
考虑寻优效率和寻优准确度,本实施例中设置movgwo算法的最大迭代次数为500,灰狼种群数为200。
[0353]
为了验证所提基于自适应非奇异智能终端滑模观测器的风力发电机载荷增广预测控制策略的有效性,本发明分别从三个方面分别进行仿真实验。首先,对多目标变速灰狼优化算法(movgwo)有效性进行仿真验证如图7所示;其次,将所设计的增广预测控制(ampc)与传统的预测控制算法对比,如图8
‑
13所示;最后,将设计自适应非奇异终端滑模观测器(antsmo)与混合非奇异终端滑模观测器(hntsmo)进行对比,如图14
‑
16所示。本实施例中选取3mw风机参数进行仿真分析,风力发电机参数如下表1所示:
[0354]
表1 3mw风力发电机参数
[0355][0356]
图7分别展示了基于mopso、mogwo和movgwo等不同优化算法所寻最优非支配解。可以看出,mopso无法找到最优的pareto前沿面,相比而言,mogwo寻优解的质量得到改善,但是易陷入局部最优。而movgwo所寻非支配解更加接近于真实的pareto前沿面且寻优时间更短。结合参数寻优设置仿真参数如下表2所示:
[0357]
表2仿真参数设置
[0358][0359]
将本实施例提供的增广预测模型与预测控制进行对比仿真,如图8
‑
13所示。其中,图8和图9展示了独立变桨距风力发电机桨距角的变化值,可以看出本节所提增广预测控制具有更小的抖振和更短的调节时间,反观预测控制则存在较大的波动。图10和图11展示了所提控制器能有效减小塔架俯仰位移和速度,降低塔架的疲劳载荷,延长使用寿命,这对风力发电机平稳运行十分有利。图12和图13展示了所提控制器能有效减少风力发电机俯仰弯矩和偏航弯矩,降低风力发电机载荷,实现了预期的控制目标。综上所述,本发明所提控制策略达到了降低风力发电机载荷的要求。
[0360]
为了充分展示本实施例提供的自适应非奇异终端滑模观测器的有效性,将所提方法与混合非奇异终端滑模观测器进行对比仿真,如图14
‑
16所示。图14和图15展示了独立变桨距风力发电机的塔架俯仰位移和俯仰速度观测效果,由图可以看出,所设计的自适应非奇异终端滑模观测器有更高的观测精度和更小的抖振,反观混合非奇异终端滑模观测器则观测精度较低;图16展示了自适应非奇异终端滑模观测器和混合非奇异终端滑模观测器自适应律的变化,可以看出自适应非奇异终端滑模观测器的控制律变化范围更小。这说明,所提观测策略能在较小的控制输入情况下,获得更好的观测效果。
[0361]
以上所述仅是本发明的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。