1.本发明涉及物理量测技术领域,特别涉及一种基于毛细现象的表面张力光学测量系统及方法。
背景技术:
2.表面张力是影响多相体系的相间传质和反应的关键因素之一,拥有着重要的液体物理性质。而对于液滴的表面张力系数测量许多应用科学和工程领域都很重要。针对目前的毛细管上升法,简便直观易操作的特点,进行测量图像采集及处理的优化,使得系统脱离人眼测量高度误差,识别高度更加精确。
3.毛细上升法测量是一种公认的简便易操作测量液体表面张力的系统,近些年对于毛细上升法的优化大部分重心放在了毛细管上升系统中,要知道,对于毛细液面上升的具体高度的读取才是测量的重点,一般是通过刻度尺进行肉眼读取,此种方法效率低,精度低,同时不便于长时间读数,不能进行实时监控读取数据。
4.针对现有技术中存在肉眼读取毛细液面上升的具体高度带来的效率低,精度低,同时不便于长时间读数的问题,本发明提供一种基于毛细现象的表面张力光学测量系统及方法。
5.本发明是通过以下技术方案来实现:
6.一种基于毛细现象的表面张力光学测量系统,其特征在于,包括测量模块和图像收集处理模块;
7.所述测量模块包括基座及依次设置于基座上的第一滑块和第二滑块;
8.所述第一滑块上侧设置有第一升降杆,所述第一升降杆上端固定设置有沿基座方向的第一承载台,用于承载工业相机;
9.所述工业相机的图像输出端连接图像收集处理模块的图像输入端;
10.所述第二滑块上侧设置有第二升降杆和第二承载台,所述第二承载台用于承载比色皿;
11.所述第二升降杆上端部连接有水平伸缩杆,所述水平伸缩杆自由端设置有毛细管圆形固定架。
12.进一步,所述基座侧壁均设置有滑槽,
13.所述第一滑块和第二滑块内壁均设置有与滑槽相对应的滑轨。
14.进一步,所述第二升降杆和水平伸缩杆水平铰接。
15.进一步,所述第二承载台承载面设置有承载凹槽。
16.进一步,所述基座侧壁设置有刻度。
17.进一步,所述第一升降杆、第二升降杆和比色皿承载台底部均设置有旋钮,用于调整竖直方向的升降。
18.进一步,所述毛细血管内径为0.5mm,长度为20cm,且沿高度方向设置有刻度。
19.进一步,所述毛细管圆形固定架的夹持部设置有海绵。
20.一种基于毛细现象的表面张力光学测量方法,包括以下步骤:
21.s1:在比色皿中加入已知密度的液体,并置于第二承载台上;
22.s2:毛细管圆形固定架竖直夹持毛细血管并伸入比色皿中,调整第二升降杆、水平伸缩杆和第二承载台的毛细血管和比色皿相对位置;
23.s3:待毛细血管内液面上升稳定后,打开工业相机并预设帧频,根据液面识别结果,调整第一承载台的高度,使得比色皿水平液面位置处在视场中央,得到毛细血管与液体接触面图像;
24.调整工业相机,使得中心视场正对毛细管水平凹液面位置,得到凹液面图像;
25.s4:工业相机将采集到的图片传至图像收集处理模块,图像收集处理模块对采集的毛细血管与液体接触面图像和凹液面图像进行处理;并根据理论方程得到待测液体表面张力信息。
26.进一步,所述图像收集处理模块对采集的毛细血管与液体接触面图像和凹液面图像进行处理过程为:
27.基于加权法的图像像素化处理,得到灰度图像;
28.基于梯度滤波原理及基尔霍夫变换对灰度图像处理,获得包含液面与刻线特征二值矩阵;
29.对二值矩阵在两个维度分别相干累积,通过离散傅里叶变换频域鉴别技术,将累积后矩阵分为液面特征矩阵和刻线特征矩阵,并初步获得液面及刻线对应坐标;
30.对刻度线坐标进行差分算法,采用卡曼滤波获得刻线宽度及刻线间距,采用直方图自适应处理,实现刻线精确识别,并根据实际刻线特征刻线间距与刻线宽度确认刻线位置,并获得像素和距离之间比例系数;
31.将液面坐标与比例系数对应获得液面实际位置;
32.重复步骤s2
‑
s6处理本组其它图像,获得液面实际位置;
33.对同一组图像获取的液面实际位置通过直方图法,采用高斯包络拟合处理,得到液位识别结果。
34.与现有技术相比,本发明具有以下有益的技术效果:
35.本发明提出一种基于毛细现象的表面张力光学测量系统,包括测量模块、图像收集处理模块。测量模块:包括基座,以及设置于基座之上的第一滑块和第二滑块,用于调节工业相机和比色皿的距离,进而能够采集到所需的图片;同时第一升降杆和第二升降杆用于调节所承载的工业相机和比色皿之间的水平高度的微调;水平伸缩杆用于横向调整第二承载台的位置,便于图片的采集,本结构简单,成本低,但同时能够精确调整拍摄区域和待测区域的位置;便于图片的采集,能够实现系统的对毛细液面高度的采集,提高了图片采集精度。
36.进一步,第一升降杆、第二升降杆和比色皿承载台底部均设置有旋钮,用于其调整竖直方向的升降,相较于传统的使用紧固螺栓进行调整,本结构能够更加精准的对高度进行微调。
37.本发明提出一种基于毛细现象的表面张力光学测量系统及方法,通过竖直高度和水平方向的多次调整,使得毛细液面稳定后,对其进行拍摄处理,再通过图像收集处理模块2对图片进行多次处理,依据公式计算得到待测液体表面的张力信息,本方法操作简单,且
能够系统性的对待测液体进行调整、采集、处理和计算,得到的图片信息和张力信息更为准确,同时能够减少现有技术中通过肉眼观察的误差,还能够提高液体张力的检测效率。
附图说明
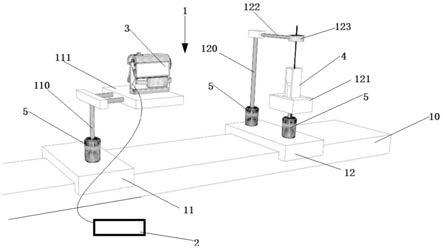
38.图1为本发明具体实施例中一种基于毛细现象的表面张力光学测量系统示意图;
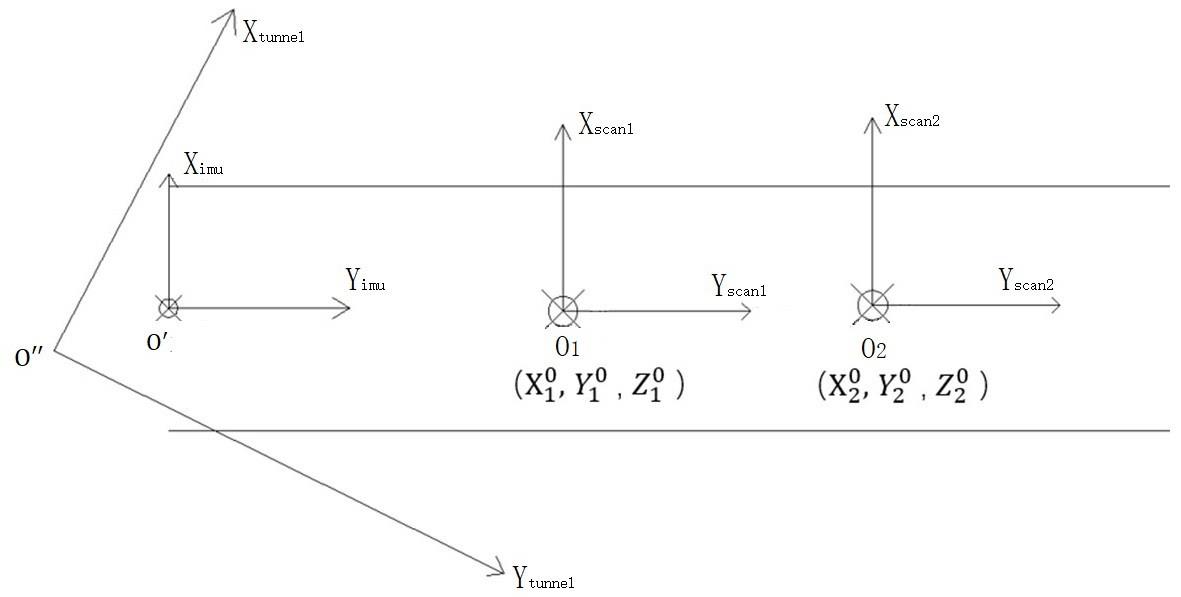
39.图2为本发明具体实施例中毛细管插入比色皿中的示意图。
40.图中:测量模块1,基座10,第一滑块11,第一升降杆110,第一承载台111,第二滑块12,第二升降杆120,第二承载台121,水平伸缩杆122,毛细管圆形固定架123,图像收集处理模块2,工业相机3,比色皿4,旋钮5。
具体实施方式
41.下面结合具体的实施例对本发明做进一步的详细说明,所述是对本发明的解释而不是限定。
42.本发明提供一种基于毛细现象的表面张力光学测量系统,如图1所示,包括测量模块1和图像收集处理模块2;
43.所述测量模块1包括基座10及依次设置于基座10上的第一滑块11和第二滑块12;
44.所述第一滑块11上侧设置有第一升降杆110,所述第一升降杆110上端固定设置有沿基座10方向的第一承载台111,用于承载工业相机3;
45.所述工业相机3的图像输出端连接图像收集处理模块2的图像输入端;
46.所述第二滑块12上侧设置有第二升降杆120和第二承载台121,所述第二承载台121用于承载比色皿4;
47.所述第二升降杆120上端部连接有水平伸缩杆122,所述水平伸缩杆122自由端设置有毛细管圆形固定架123。具体的,所述水平伸缩杆122水平移动区域覆盖比色皿承载台121的承载面积,同时,所述水平伸缩杆122的伸缩长度不小于比色皿承载台121的承载范围。
48.本发明提供的一种优选实施例为,所述基座10侧壁均设置有滑槽,所述第一滑块11和第二滑块12内壁均设置有与滑槽相对应的滑轨,便于工业相机3和比色皿4之间水平距离的对焦调整。
49.进一步的,所述第二升降杆120和水平伸缩杆122水平铰接,便于对毛细管水平方向的微调,便于工业相机3的对焦和调整。
50.本发明提供的另一种优选实施例为,所述第二承载台121承载面设置有承载凹槽,具体的,承载凹槽便于放置比色皿4,避免在水平方向和/或竖直方向进行调整的过程中,引起比色皿4的相对位移,进而提高本系统的稳定性和精度。
51.本发明提供的另一种优选实施例为,所述基座10侧壁设置有刻度,具体的,现场工作人员可以根据刻度,对第一滑块11和第二滑块12进行相对调整,进而能够准确的、可量化的进行调整,提高调整精度和调整效率。
52.本发明提供的另一种优选实施例为,所述第一升降杆110、第二升降杆120和比色皿承载台121底部均设置有旋钮5,用于调整竖直方向的升降,旋钮5能够实现竖直方向的微调,同时易于调整,相较于传统的使用紧固螺栓进行调整,本结构能够更加精准的对高度进
行微调。
53.本发明提供的另一种优选实施例为,所述毛细血管内径为0.5mm,长度为20cm,且沿高度方向设置有刻度。
54.本发明提供的另一种优选实施例为,所述毛细管圆形固定架123的夹持部设置有海绵,放置毛细管的崩裂。
55.本发明提供一种基于毛细现象的表面张力光学测量方法,包括以下步骤:
56.s1:在比色皿4中加入已知密度的液体,并置于第二承载台121上;
57.s2:毛细管圆形固定架123竖直夹持毛细血管并伸入比色皿4中,调整第二升降杆120、水平伸缩杆122和第二承载台121的毛细血管和比色皿4相对位置;
58.s3:待毛细血管内液面上升稳定后,打开工业相机3并预设帧频,根据液面识别结果,调整第一承载台111的高度,使得比色皿水平液面位置处在视场中央,得到毛细血管与液体接触面图像;
59.调整工业相机3,使得中心视场正对毛细管水平凹液面位置,得到凹液面图像;
60.s4:工业相机3将采集到的图片传至图像收集处理模块2,图像收集处理模块2对采集的毛细血管与液体接触面图像和凹液面图像进行处理;并根据理论方程得到待测液体表面张力信息。
61.进一步的,所述图像收集处理模块2对采集的毛细血管与液体接触面图像和凹液面图像进行处理过程为:
62.基于加权法的图像像素化处理,得到灰度图像;
63.基于梯度滤波原理及基尔霍夫变换对灰度图像处理,获得包含液面与刻线特征二值矩阵;
64.对二值矩阵在两个维度分别相干累积,通过离散傅里叶变换频域鉴别技术,将累积后矩阵分为液面特征矩阵和刻线特征矩阵,并初步获得液面及刻线对应坐标;
65.对刻度线坐标进行差分算法,采用卡曼滤波获得刻线宽度及刻线间距,采用直方图自适应处理,实现刻线精确识别,并根据实际刻线特征刻线间距与刻线宽度确认刻线位置,并获得像素和距离之间比例系数;
66.将液面坐标与比例系数对应获得液面实际位置;
67.重复步骤s2
‑
s6处理本组其它图像,获得液面实际位置;
68.对同一组图像获取的液面实际位置通过直方图法,采用高斯包络拟合处理,得到液位识别结果。
69.进一步的,通过方程对液体表面张力的计算过程为:
70.一块内表面光滑直径为d的毛细玻璃管插入液体中会呈现图2所示的情形。
71.液体首先润湿管壁形成弯月面,图中0点为固、气、液三相的会和点;图2中气
‑
液界面在0点的切线与固
‑
液界面的夹角称为接触角θ;有三个力作用于0处:力图缩小固
‑
气界面的表面张力γ
sg
;力图缩小固
‑
液界面的表面张力γ
sl
;力图缩小气
‑
液界面的表面张力γ
gl
;在相界面不再变动的情况下三个力存在下列关系
72.γ
sg
‑
γ
sl
=γ
gl
cosθ
73.上式称为毛细管的杨氏方程。
74.从能量角度分析,对于毛细管液面上升高度与表面张力的关系,可以根据吉布斯
自由能推导出,对于表面自由能的能量形式包括表面张力,重力的积分形式,液面稳定状态下在壁面上的演化的吉布斯自由能一般形式表达式为:
[0075][0076]
其中g
g
为液体上升的重力,a
sg
、a
sl
、a
gl
分别为固
‑
气界面面积、固
‑
液界面面积、气
‑
液表面面积,r为毛细管半径。当液面稳定平衡时,对吉布斯自由能进行一阶变分,并令其得零,于是上式变为:
[0077]
δg=
‑
2πr(γ
sg
‑
γ
sl
)δh (πr2ρgh)δh=0
[0078]
求得平衡高度为:
[0079][0080]
其中r为毛细管半径。将杨氏方程带入到上式中得到:
[0081][0082]
其中θ为液体与毛细管壁面的接触角,此式就得到毛细管上升液体的高度与待测液体表面张力的关系,通过测量待测液体的上升高度,通过此式就可得到待测液体的表面张力。对于水来说,弯曲液面的体积约为1.9
×
10
‑4z0,可以看出其体积与最低点高度差4个数量级,所以可以忽略弯曲液面的体积,因此在测量高度时,可以忽略弯曲液面的高度,只需要测量凹液面的高度,就可以近似为等效高度,于是上式可以化简为:
[0083][0084]
因此只要知道待测液体的上升到稳定状态的高度,待测液体的密度,重力加速度g=9.8m/s2,毛细管半径,就可以知道待测液体表面张力;测量方面,基于工业相机实时监控毛细上升高度,通过工业相机对毛细管刻度、液面位置自动识别,获得毛细上升的高度。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。