一种基于cpiii控制点的隧道移动激光扫描点云坐标纠正方法
技术领域
1.本发明涉及地铁隧道检测的技术领域,尤其是一种基于cpiii控制点的隧道移动激光扫描点云坐标纠正方法。
背景技术:
2.移动激光扫描技术应用于地铁隧道测量,具有高效率、高分辨率、高精度的特点,一次扫描可以获得地铁隧道的水平直径及环片影像,已成熟应用于隧道变形监测及病害普查。
3.在移动激光扫描测量过程过,扫描仪以断面扫描的方式,获取隧道环片在激光扫描仪二维坐标系下的点云坐标。激光扫描二维坐标系是激光扫描仪内部最原始的极坐标系,激光扫描仪通过测量从激光发射中心点到环片表面激光反射点之间的距离ρ与激光从初始位置到当前发射方向转过的扫描观测角θ来得到环片表面点的空间坐标。
4.但在断面扫描模式下获取的扫描线之间无空间相对关系,移动激光扫描系统加装惯性测量单元后,可以实时测量系统的加速度及姿态参数,从而建立扫描线之间的空间关系。
5.由于惯性测量单元中陀螺仪传感器的测量误差会随着时间累积,产生轨迹漂移,需要引入控制点对惯性测量单元进行校正。
6.但在隧道内无实时定位信号,无法获取移动激光扫描系统在隧道坐标系中的位置,从而测量成果无法与既有设计资料融合对比,极大限制了移动激光扫描技术的应用场景。
技术实现要素:
7.本发明的目的是根据上述现有技术的不足,提供了一种基于cpiii控制点的隧道移动激光扫描点云坐标纠正方法,利用隧道内既有的cpiii控制网点对移动激光扫描系统的点云坐标进行纠正,有效地提高实际工程中移动测量的效率。
8.本发明目的实现由以下技术方案完成:一种基于cpiii控制点的隧道移动激光扫描点云坐标纠正方法,其特征在于:所述纠正方法包括以下步骤: 通过移动激光扫描系统的扫描仪采集各扫描点在以每个时刻的所述扫描仪中心位置为原点的扫描坐标系下的坐标,得到隧道原始的点云集 p0;通过所述移动激光扫描系统的惯性测量单元采集所述扫描仪中心在以作业起始时刻的所述扫描仪中心位置为原点的惯导坐标系下的位置坐标,得到所述扫描仪中心的位置数据集l0;分别对所述点云集p0和所述位置数据集l0进行切割分段处理,将得到的两区段根据时间基准进行融合,得到惯导坐标系下的隧道的点云集;
在所述点云集中识别cpiii控制点的测量标志坐标,根据已知的cpiii控制点在隧道坐标系的坐标,通过转换模型求得惯导坐标系和隧道坐标系的转换参数;根据惯导坐标系和隧道坐标系的转换参数,得到隧道坐标系下的点云集;整合所有的所述点云集,得到区段点云集p
tunnel
。
9.所述点云集p0各点坐标为,所述位置数据集l0各点坐标为;所述点云集p0和所述位置数据集l0通过切割分段处理分别得到区段和;所述点云集中各扫描点的坐标为,其计算公式为:。
10.在所述点云集中识别cpiii控制点的测量标志坐标为;已知的cpiii控制点在隧道坐标系中的坐标为;所述转换模型的公式为:,其中,惯导坐标系和隧道坐标系的转换参数为:尺度改正数λ,旋转矩阵r0,平移参数;所述点云集各点坐标为,所述区段点云
集p
tunnel
为。
11.在利用cpiii控制点求取惯导坐标系和隧道坐标系的转换参数时,所述点云集间设有重叠区域且所述重叠区域内设有cpiii控制点。
12.本发明的优点是:1、利用隧道内既有的cpiii控制网点对移动激光扫描系统的点云坐标进行纠正,无需重复布设控制网;移动激光扫描系统一键启动,以一定的速度连续采集隧道激光扫描点云,无需人工干预,减少了人工工作量;2、通过分区段对移动激动扫描数据进行点云坐标三维重建的计算方式,并解决了移动激光扫描系统中惯性测量单元测量误差随时间累积产生轨迹漂移的问题,提高移动激光扫描测量竣工测量成果精度至
±
5cm,满足轨道交通竣工测量的要求。
附图说明
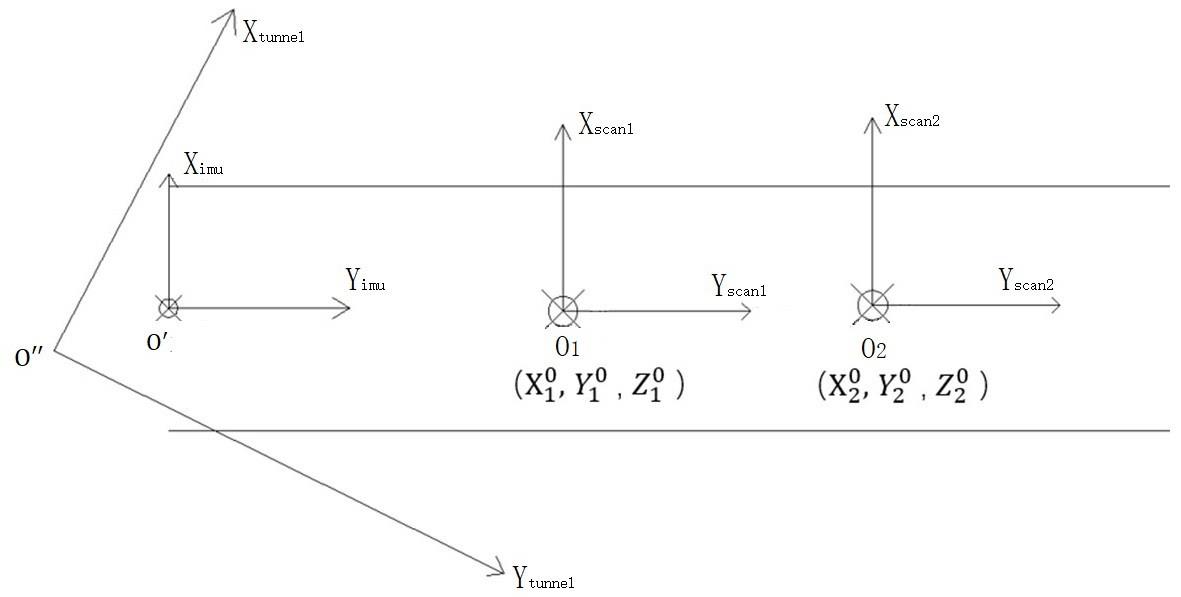
13.图1为本发明的隧道坐标系、惯导坐标系以及扫描坐标系的平面示意图;图2为本发明在计算转换参数时各点云集的分布示意图;图3为本发明通过移动激光扫描系统与人工传统手段获得的轨道交通竣工测量成果对比图。
具体实施方式
14.以下结合附图通过实施例对本发明特征及其它相关特征作进一步详细说明,以便于同行业技术人员的理解:实施例:本实施例涉及一种基于cpiii控制点的隧道移动激光扫描点云坐标纠正方法,纠正方法包括以下步骤:1、移动激光扫描系统上集成有扫描仪、惯性测量单元、里程计与轨道车等,扫描仪、惯性测量单元以及里程计均安装在轨道车上,轨道车可沿隧道轨道移动,通过扫描仪采集隧道原始的点云集p0,点云集p0由以每个时刻的扫描仪中心位置为原点的扫描坐标系下的所有扫描点组成,且每个扫描点坐标,如图1所示,以两个位于不同位置的扫描仪中心为例,当扫描仪中心位于扫描仪中心o1(扫描仪中心o2)处时,扫描坐标系的横纵坐标轴分别为xscan1和yscan1(xscan2和yscan2);通过惯性测量单元采集扫描仪中心的位置数据集l0,扫描仪中心在惯导坐标系(惯导坐标系原点设定为作业起始时刻的扫描仪中心位置)下的位置坐标为,如图1所示,扫描仪中心o1和o2在惯导坐标系中的坐标分别为和。
15.2、鉴于惯性测量单元测量误差随时间会累积,将步骤1中的点云集p0和位置数据集l0进行切割分段处理,分别得到和两个区
段,并进行以下处理:a、将原始数据和根据时间基准进行融合,得到惯导坐标系下的隧道的点云集,每个扫描点坐标为,如图1所示,和分别为惯导坐标系的横纵坐标轴,o’为惯导坐标系原点,惯导坐标系原点为作业起始时刻的扫描仪中心位置,另外,点云集中各扫描点坐标的计算公式为:;b、在点云集中识别cpiii控制点测量标志坐标为;c、已知cpiii控制点在隧道坐标系的坐标为,根据如下转换模型求得惯导坐标系和隧道坐标系的转换参数,转换模型的公式为:;其中,惯导坐标系和隧道坐标系的转换参数为:尺度改正数λ,旋转矩阵r0,平移参数;d、如图2所示,为避免隧道坐标系下的点云集之间存在错位,在进行c步骤利用cpiii控制点求取惯导坐标系和隧道坐标系的转换参数的转换参数时,每两相邻的点云集之间(本实施例中以和为例)需有重叠区域,重叠区域需有cpiii控制点;e、根据两个坐标系的转换参数,重复步骤a、b、c,即可得到隧道坐标系下的点云集,如图1所示,x
tunnel
和y
tunnel
分别为隧道坐标系的横纵坐标,o”为隧道坐标系原点,点云集中每个点的坐标为。
16.另外,本实施例中,隧道cpiii控制网是为轨道铺设和运营维护提供控制基准,由沿线路成对布设的永久控制点组成,在隧道内直线段点间距约60米,曲线段间隔约40米,有规律地布设在隧道两侧环片的腰部。
17.3、重复步骤2将隧道所有区段的点云数据进行坐标纠正,得到所有的点云集,整合所有的点云集,得到区段点云集p
tunnel
,为。
18.4、基于点云集p
tunnel
计算隧道坐标系下各种测量成果,如隧道中心线、轮廓线及隧道横断面等,可与既有设计资料进行融合。
19.如图3所示,为通过移动激光扫描系统与人工传统手段获得的轨道交通竣工测量成果对比图,其中横轴为隧道环片编号,纵轴为两种技术手段获取成果的对比偏差值。由此图可知,移动激光扫描测量竣工测量成果精度与人工传统手段的精度相差
±
5cm,满足轨道交通竣工测量的要求。
20.虽然以上实施例已经参照附图对本发明目的的构思和实施例做了详细说明,但本领域普通技术人员可以认识到,在没有脱离权利要求限定范围的前提条件下,仍然可以对本发明作出各种改进和变换,故在此不一一赘述。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。