1.本发明涉及传感器技术领域,特别涉及一种多机制融合电子皮肤及其制备方法。
背景技术:
2.未来机器人面向系统智能化、场景多样化以及协同复杂化的应用需求,对安全防碰撞提出更高的要求。现有机器人较多采用的智能避障技术(或安全防碰撞)多为视觉和接近觉,单靠视觉实现防碰撞的功能面临最大的技术问题是如何解决视觉盲区以及反应相对迟缓不及时的问题,接近觉防碰撞技术面临距离测算、对碰撞风险程度精确计算以及无法及时安全响应问题。
3.中国专利(授权公告号:cn212254424u)公开了一种机器人用柔性接近觉和触觉双模传感器,包括第一层柔性薄膜、弹性电介质以及第二层柔性薄膜,所述第一层柔性薄膜上通过导电油墨印制有第一电极,第二层柔性薄膜上通过导电油墨印制有第二电极,第一层柔性薄膜上的第一电极和第二层柔性薄膜上的第二电极构成一个电容器作为接近觉传感器;外界物体直接对传感器施加压力时,弹性电介质产生弹性形变作为触觉传感器。但接近觉传感器和压力传感器如果按照上诉三层式设计的话,存在相互干扰的可能;且压力感应包括轻触和重压两种模式,这两种模式对传感器的精度要求是不一样的。
技术实现要素:
4.针对现有技术中皮肤传感器工作机制单一的问题,本发明提出一种多机制融合电子皮肤及其制备方法,通过设计接近觉、轻触和压阻式压力多种感应模式,提高了传感器的实用性和感知范围。
5.为了实现上述目的,本发明提供以下技术方案:
6.一种多机制融合电子皮肤,包括人造革和导电弹性材料层,人造革位于导电弹性材料层正上方;所述人造革的上表面印刷有第一电极,人造革的下表面设置第二电极,导电弹性材料层的下表面印刷有第三电极;
7.外界物体作为一个电极靠近第一电极时,发生电容耦合,从而产生电容感应,此为传感器的接近觉感应模式;第一电极、人造革和第二电极构成一个电容器,当受到按压变形时,第一电极和第二电极之间的电容量会发生变化,此为传感器的轻触觉感应模式;当外界压力继续增大时,第二电极被挤压从而使得导电弹性材料层压缩,接触电阻和导电弹性材料层电阻发生变化,使得第二电极与第三电极之间的电阻值发生变化,此为传感器的压阻式压力感应模式。
8.优选的,所述导电弹性材料层和第二电极之间设置有隔离层,隔离层为不导电且具有弹性的材料。
9.优选的,所述第一电极为碳纳米材料电极。
10.优选的,所述人造革上表面为合成树脂,下表面为纤维纺织物面。
11.优选的,所述导电弹性材料层为填充有炭黑、石墨烯、碳纳米管的硅胶/橡胶弹性
聚合物。
12.本发明还提供一种多机制融合电子皮肤的制备方法,用于制备权利要求1
‑
5所述的任一一种多机制融合电子皮肤,包括以下步骤:
13.s1:按照1:4或1:5的重量比例选取具有第一碳化功率的第一纱线和具有第二碳化功率的第二纱线;
14.s2:将第一纱线和第二纱线进行混纺的到第三纱线,再将第三纱线进行编织,从而得到纤维编织物;
15.s3:在纤维纺织物的第一表面涂抹合成树脂,固化后得到人造革,即人造革的第一表面为合成树脂,第二表面为纤维编织物面;
16.s4:在人造革的第一表面印刷第一电极,再采用聚焦激光器利用第一碳化功率对人造革的纤维编织物面进行聚焦碳化,即仅将激光照射在需要碳化的区域,从而形成第二电极;
17.s5:在导电弹性材料层第一表面印刷第三电极,再将印刷有第三电极的导电弹性材料层的第二表面放置在第二电极的正下方,组成多机制融合电子皮肤。
18.优选的,所述s1中,第二功率>第一功率。
19.优选的,所述s3中,所述合成树脂的层数至少2层,厚度为0.5mm
‑
2mm。
20.优选的,所述s5中,所述第三电极至少能覆盖第二电极在导电弹性材料层的投影区域。
21.优选的,所述第三电极和第二电极之间设置有隔离层,隔离层为不导电且具有弹性的材料。
22.综上所述,由于采用了上述技术方案,与现有技术相比,本发明至少具有以下有益效果:
23.(1)本发明通过设计多机制融合感知的传感器,通过接近觉、轻触和压阻式压力多种感应模式,提高了传感器的实用性和感知范围,且精度高和量程大,可用于不同场景的工作,同时当传感器发生碰撞时,也能为碰撞双方提供缓冲和吸能作用,减少损害。
24.(2)本发明提出人造革下表面为纤维纺织物,人造革中的第一纱线易于碳化,其碳化激光功率低于第二纱线。该发明聚焦激光功率设置为第一纱线碳化功率,具有激光功率低的优点,可以避免碳化温度过高带来的问题(合成树脂层发生变性,带来柔弹性、拉伸断裂等力学性质发生改变,以及合成树脂层的薄膜整体形变收缩);第二纱线在激光处理过程中不会碳化,可保持碳化后的纤维编织物整体力学性质不会明显变化。
25.(3)在重压下传感机制为压阻式机制,具体为分离式接触电阻响应机制与导电填充的体电阻响应机制叠加,不仅提升了传感器的灵敏度,更重要的是,可提升传感器的力学响应的线性度,从而提升器件的重压下的测量精度。
附图说明:
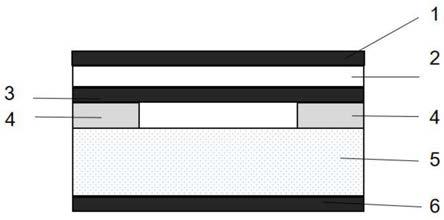
26.图1为根据本发明示例性实施例的一种多机制融合电子皮肤示意图。
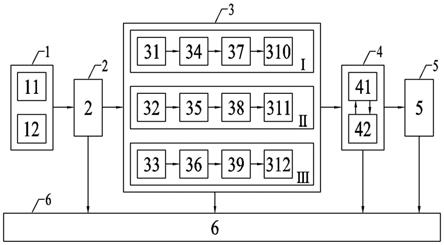
27.图2为根据本发明示例性实施例的一种多机制融合电子皮肤的制备方法示意图。
28.图3为根据本发明示例性实施例的纤维编织物面的第二电极示意图。
具体实施方式
29.下面结合实施例及具体实施方式对本发明作进一步的详细描述。但不应将此理解为本发明上述主题的范围仅限于以下的实施例,凡基于本发明内容所实现的技术均属于本发明的范围。
30.在本发明的描述中,需要理解的是,术语“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
31.实施例1
32.如图1所示,本发明提供一种多机制融合电子皮肤,包括人造革2和导电弹性材料层5,人造革2和导电弹性材料层5上下重叠放置,即人造革2位于导电弹性材料层5的正上方。在人造革2的上表面印刷有第一电极1;在人造革2的下表面(人造革的纤维纺织物面3)上设置有第二电极;在导电弹性材料层5的下表面设置有第三电极6,导电弹性材料层5和第二电极之间设置有隔离层4。隔离层4的材料为不导电且具有弹性的材料,例如橡胶、硅胶等。导电弹性材料层5为填充有炭黑、石墨烯、碳纳米管的硅胶/橡胶弹性聚合物。
33.本实施例中,隔离层4的结构为镂空结构,不能遮挡第二电极和导电弹性材料层5的接触,否则压阻式压力感应模式失效。隔离层4起到隔离第二电极和导电弹性材料层5的作用,因此隔离层4的面积可根据第二电极和导电弹性材料层5的大小进行适应性调整,只要保证在平常状态下(没受到外界压力)第二电极和导电弹性材料层5不接触即可。隔离层4优先设置为感温隔离层,用于感知外界的温度。
34.当外部威胁因素(特指自带电容特性的物质,如人体、铁质物体等)作为一个电极靠近第一电极1时,发生电容耦合,从而产生电容量的变化,此为传感器的接近觉感应模式。本实施例中,可通过与传感器连接的电容采集电路去捕捉电容变化信号。
35.第一电极1、人造革2和第二电极构成一个电容器,当受到按压变形时,随着第一电极1和第二电极之间距离的减小,电容量会发生变化,此为传感器的轻触觉感应模式。本实施例中,可通过与传感器连接的电容采集电路捕捉电容变化信号。
36.外界压力继续增大时,第二电极被挤压从而使得导电弹性材料层压缩,接触电阻(即第二电极和导电弹性材料层接触后产生的电阻)和导电弹性材料层自身电阻发生变化,使得第二电极与第三电极之间的电阻值发生变化,此为传感器的压阻式压力感应模式。本实施例中,可通过与传感器连接电阻采集电路捕捉电阻值变化信号。
37.导电弹性材料层5为填充有炭黑、石墨烯、碳纳米管的硅胶/橡胶弹性聚合物,厚度在3
‑
5mm。因此导电弹性材料层5具备弹性缓冲吸能的功能,当电子皮肤与外界碰撞发生时,可起到吸收/缓冲冲击力、保护传感器及内部电路的作用。
38.本实施例中,第一电极1为碳纳米材料电极,通过电容耦合原理采集电容变化信号。
39.本实施例中,第三电极6为底电极阵列。
40.本实施例中,电子皮肤的集成度高,可应用于各种场景(机器人皮肤);由于采用了三种感应模式(接近觉、轻触觉、压阻式压力),因此工作范围广,同时涵盖精度高和量程大
两种特性。
41.本实施例中,接近觉 轻触觉 压阻式压力感应模式的工作原理:当外部威胁因素(特指自带电容特性的物质,如人体、铁质物体等)靠近时,接近觉感应模式率先工作并捕捉到电容耦合信号,电路控制模块采集到电容变化信号;外部威胁因素继续靠近并最终与传感器接触时产生,轻触觉感应模式(感知范围:0.01g~50g)开始工作,电路控制模块采集到电容变化信号,相较于接近觉感应模式有优先系统控制权,同时根据不同的触摸方式设置对应的控制功能,如:两指并拢向左滑动代表向左移动,单指向左滑动代表返回上级指令等;当外部威胁因素继续与传感器接触时,压力变大,压阻式压力感应模式(感知范围:20g~100kg)开始工作,电路控制模块采集到电阻变化信号。
42.如图2所示,本实施例中,提供一种多机制融合电子皮肤的制备方法,具体包括以下步骤:
43.s1:按照1:4或1:5的比例选取具有第一碳化功率的第一纱线和具有第二碳化功率的第二纱线。例如第一纱线的重量为选取纱线总重量的20%,第二纱线的重量为选取纱线总重量的80%。
44.本实施例中,第一纱线和第二纱线的比例可以调节,从而调节纤维编织物的导电性。
45.s2:将第一纱线和第二纱线混纺得到第三纱线,再将第三纱线进行编织,得到纤维编织物。
46.第一纱线碳化激光功率为第一碳化功率,第二纱线碳化激光功率为第二碳化功率,且第二碳化功率>第一碳化功率,例如第一碳化功率为6w,第二碳化功率为50w。即第一纱线为低功率碳化,这样对第一纱线的物理特性影响不大,第二纱线为高功率碳化,这样会增加第二纱线的导电性,但同时也会破坏它们本身的物理特性。碳化时间为30
‑
60min。
47.s3:在纤维纺织物的第一表面涂抹合成树脂(或混合塑料添加剂),固化后得到人造革,即人造革的第一表面为合成树脂,第二表面为纤维纺织物面;再采用聚焦激光器并利用第一碳化功率对人造革的纤维编织物面进行聚焦碳化,即仅将激光照射在需要碳化的区域(例如阵列区域),从而形成阵列化的第二电极,如图3所示。
48.本实施例中,合成树脂通常印刷2层以上,厚度达到一定要求(例如0.5mm
‑
2mm),这样便于印刷电极,若厚度不够在印刷电极时易对导电混纺纤维人造革的表面造成损伤。
49.本实施例中,采用第一碳化功率对人造革的纤维编织物面进行聚焦碳化的好处是,具有激光功率低的优点,可以避免碳化温度过高带来的问题,例如合成树脂层发生变性,带来柔弹性、拉伸断裂等力学性质发生改变,以及合成树脂层的薄膜整体形变收缩等;同时第二纱线在聚焦碳化处理过程中不会被碳化(聚焦碳化的碳化功率小于第二纱线对应的第二功率),可保持碳化后的纤维编织物中第二纱线的整体力学性质不会明显变化,这样可以保证人造革的导电性。
50.本实施例中,聚焦激光器的功率p范围为第一碳化功率≤p<第二碳化功率,这样才能保证只碳化纤维纺织物中的第一纱线,不会碳化第二纱线。
51.s4:在人造革的第一表面(涂抹有合成树脂的表面)印刷第一电极,则人造革的第二表面为第二电极;
52.s5:在导电弹性材料层第一表面(下表面)印刷第三电极,再将印刷有第三电极的
导电弹性材料层的第二表面(上表面)放置在第二电极的正下方,组成多机制融合电子皮肤。第三电极至少能覆盖第二电极的投影区域,这样能提高压阻式压力模式的精度。
53.本实施例中,导电弹性材料层和第二电极设置有隔离层(采用不导电且具有弹性的材料,例如橡胶、硅胶等),即导电弹性材料层可通过隔离层和人造革进行固定。
54.本实施例中,第三电极为底电极阵列。隔离层的作用是将导电弹性材料层和第二电极隔离,即将轻触觉感应模式和压阻式压力感应模式分开,当外界压力在轻触觉感应模式工作范围内(0.01g~50g)时压阻式压力感应模式不工作,当外界压力变大(20g~100kg)时压阻式压力感应模式开始工作。压阻式压力感应模式,具体为分离式接触电阻响应机制(即第二电极和导电弹性材料层之间接触产生的电阻)与导电弹性材料层自身电阻响应机制叠加,不仅提升了电子皮肤的灵敏度,更重要的是,可提升电子皮肤的力学响应的线性度,从而提升器件的重压下的测量精度。
55.本实施例中,当外界物体在没触碰电子皮肤之前,接近觉感应模式在工作;当外界物体与电子皮肤发生触碰或碰撞,则电子皮肤的工作优先级为压阻式压力感应模式>轻触觉感应模式>接近觉感应模式。
56.本实施例中,一种多机制融合电子皮肤可用于安装在机器人皮肤上,由于具备多机制感应模式(接近觉、轻触觉、压阻式压力),因此工作范围广、精度高和量程大,提高了机器人对外界的感应能力。
57.本领域的普通技术人员可以理解,上述各实施方式是实现本发明的具体实施例,而在实际应用中,可以在形式上和细节上对其作各种改变,而不偏离本发明的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。