1.本实用新型涉及压缩机装配领域,尤其涉及一种适用于压缩机装配的智能吊装机构。
背景技术:
2.压缩机是提供气源动力的设备,是气动系统的核心设备,机电引气源装置中的主体,它是将原动的机械能转换成气体压力能的装置,是压缩空气的气压发生装置。压缩机的组装需要将电机、进气空滤芯、油过滤器、油气分离器和螺杆机等部件有序安装入压缩机外箱内,目前企业在生产时,大多会采用吊装设备进行辅助。
3.中国专利cn108516453a公开了一种压缩机吊装设备,包括装置本体;所述装置本体由挂扣、固定板、链条和电磁铁组成,所述导线与直流电源连接,所述电磁铁上侧四周设置有底端固定环,所述底端固定环与链条相互连接,所述链条远离底端固定环一侧与上端固定环相互连接,所述上端固定环位于固定板底端,所述固定板上侧设置有盛放筒,所述盛放筒上侧设置有上端挡板,所述挂扣底端为圆柱形设置,所述挂扣底端伸入盛放筒内部,所述挂扣伸入盛放筒内部段底端设置有底端挡板,所述底端挡板伸出盛放筒外侧,所述上端挡板和底端挡板之间设置有弹簧。
4.如上所述的吊装设备,尽管提高了工作效率,但仍然存在占用空间大,转移不便、能源耗损高和操作难度大等问题。
技术实现要素:
5.本实用新型提出了一种适用于压缩机装配的智能吊装机构,解决了传统装配模式中存在劳动强度大、占用空间大、能耗高和操作不便等问题。
6.为了实现上述目的,本实用新型采用了如下技术方案:
7.一种适用于压缩机装配的智能吊装机构,包括主体框架、辅助调节座部分、吊装机构部分和智能控制部分。
8.所述主体框架包括底座和“l”形支架。
9.所述底座包括基板和基座。
10.所述基板为长方体一,基板下底面上设置两个条形凹槽。
11.所述基座为长方形中空容器一,基座设置于基板上底面上;基座上底板上设置一个长方形凹槽一和四个长方形通孔一;四个长方形通孔一均位于长方形凹槽一内,且呈矩形分布;长方形凹槽一内设置长方形凹槽二。
12.所述“l”形支架包括长方形竖板一和水平横板一。
13.所述长方形竖板一上等距设置若干圆形透孔。
14.所述水平横板一上设置四个圆形通孔一;四个圆形通孔一呈矩形分布。
15.所述辅助调节座部分包括下端高度调节机构。
16.所述下端高度调节机构包括推杆电机和回形底框。
17.所述推杆电机设置于基座内,推杆电机的活动端滑动连接于长方形通孔一内。
18.所述回形底框下端设置四个长方形连接块,长方形连接块的下底面设置于推杆电机的活动端上。
19.所述回形底框四边的内侧均设置“l”形开口槽,四个“l”形开口槽构成一“回”字形限位槽。
20.所述吊装机构部分包括伺服电机、卷轴、挂钩和“c”形载架。
21.所述卷轴设置两个,位于同一转轴上,转轴销轴连接于安装块上。
22.所述安装块设置于水平横板一上;两个卷轴分别位于两个圆形通孔上方。
23.所述卷轴上设置绳链,绳链另一端穿过圆形通孔一后设置于挂钩上。
24.所述“c”形载架上端设置两个连接环,“c”形载架下端开口处设置一限位柱。
25.所述伺服电机设置于水平横板上,伺服电机的主动轴通过一减速箱设置于转轴上。
26.所述智能控制部分包括感应判定机构、启动调节机构和重置机构。
27.所述感应判定机构包括红外避障传感器模块、压力传感器模块、距离传感器和微处理器。
28.所述红外避障传感器模块通过安装架设置于回形底框的下底面上,红外避障传感器模块的感应端朝向回形底框的上方。
29.所述压力传感器模块通过安装架设置于长方形凹槽二内。
30.所述微处理器设置于基座内。
31.所述距离传感器设置于“c”形载架侧壁上。
32.所述启动调节机构包括触摸传感器模块一、触摸传感器模块二和触摸传感器模块三。
33.所述触摸传感器模块一、触摸传感器模块二和触摸传感器模块三均设置于长方形竖板侧壁上。
34.所述重置机构包括电源开关和复位脉冲开关。
35.所述电源开关和复位脉冲开关设置于长方形竖板一上。
36.所述推杆电机、伺服电机、红外避障传感器模块、压力传感器模块、距离传感器、摸传感器模块一、触摸传感器模块二、触摸传感器模块三、电源开关、复位脉冲开关和微处理器间电性连接。
37.作为优选,用双筒卷扬机替换伺服电机、卷轴和绳链的组合。
38.进一步,增设万向轮于基板的下底面上。
39.作为优选,用“n”型支杆、调节链和承载板的组合替换“l”形支架。
40.相对于现有技术的有益效果:
41.本实用新型中,通过主体框架、辅助调节座部分、吊装机构部分和智能控制部分的一体化设置,可实现对压缩机的智能吊装,占用空间小,能耗低,可移动;辅助调节座部分可显著降低劳动强度,配合吊装机构部分,优化了吊装模式,显著提升装配效率。
附图说明
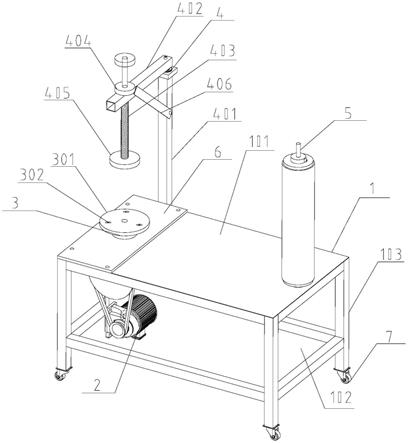
42.图1为本实用新型正视局部剖面结构示意图;
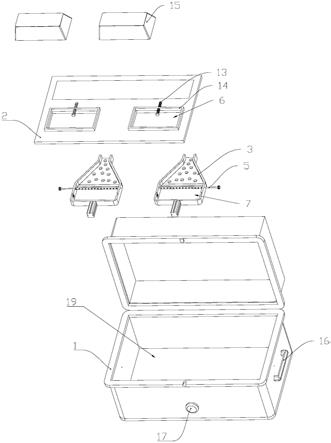
43.图2为本实用新型俯视结构示意图。
44.图中:101. 基板、102. 基座、103. 条形凹槽、104. 长方形凹槽一、105. 长方形通孔一、106. 长方形凹槽二、107. 长方形竖板一、108. 水平横板一、109. 圆形通孔一、201. 推杆电机、202. 回形底框、203.
ꢀ“
回”字形限位槽、301. 伺服电机、302. 卷轴、303.
ꢀ“
c”形载架、304. 安装块、305. 转轴、306.限位柱、401. 距离传感器。
具体实施方式
45.实施例1,参照附图1
‑
2,一种适用于压缩机装配的智能吊装机构,包括主体框架、辅助调节座部分、吊装机构部分和智能控制部分。
46.所述主体框架包括底座和“l”形支架。
47.所述底座包括基板101和基座102。
48.所述基板101为长方体一,基板101下底面上设置两个条形凹槽103。
49.所述基座102为长方形中空容器一,基座102设置于基板101上底面上;基座102上底板上设置一个长方形凹槽一104和四个长方形通孔一105;四个长方形通孔一105均位于长方形凹槽一104内,且呈矩形分布;长方形凹槽一104内设置长方形凹槽二106。
50.所述“l”形支架包括长方形竖板一107和水平横板一108。
51.所述长方形竖板一107上等距设置若干圆形透孔。
52.所述水平横板一108上设置四个圆形通孔一109;四个圆形通孔一109呈矩形分布。
53.所述辅助调节座部分包括下端高度调节机构。
54.所述下端高度调节机构包括推杆电机201和回形底框202。
55.所述推杆电机201设置于基座102内,推杆电机201的活动端滑动连接于长方形通孔一105内。
56.所述回形底框202下端设置四个长方形连接块,长方形连接块的下底面设置于推杆电机201的活动端上。
57.所述回形底框202四边的内侧均设置“l”形开口槽,四个“l”形开口槽构成一“回”字形限位槽203。
58.所述吊装机构部分包括伺服电机301、卷轴302、挂钩和“c”形载架303。
59.所述卷轴302设置两个,位于同一转轴305上,转轴305销轴连接于安装块304上。
60.所述安装块304设置于水平横板一108上;两个卷轴302分别位于两个圆形通孔上方。
61.所述卷轴302上设置绳链,绳链另一端穿过圆形通孔一109后设置于挂钩上。
62.所述“c”形载架303上端设置两个连接环,“c”形载架303下端开口处设置一限位柱306。
63.所述伺服电机301设置于水平横板上,伺服电机301的主动轴通过一减速箱设置于转轴305上。
64.所述智能控制部分包括感应判定机构、启动调节机构和重置机构。
65.所述感应判定机构包括红外避障传感器模块、压力传感器模块、距离传感器401和微处理器。
66.所述红外避障传感器模块通过安装架设置于回形底框202的下底面上,红外避障
传感器模块的感应端朝向回形底框202的上方。
67.所述压力传感器模块通过安装架设置于长方形凹槽二106内。
68.所述微处理器设置于基座102内。
69.所述距离传感器401设置于“c”形载架303侧壁上。
70.所述启动调节机构包括触摸传感器模块一、触摸传感器模块二和触摸传感器模块三。
71.所述触摸传感器模块一、触摸传感器模块二和触摸传感器模块三均设置于长方形竖板侧壁上。
72.所述重置机构包括电源开关和复位脉冲开关。
73.所述电源开关和复位脉冲开关设置于长方形竖板一107上。
74.所述推杆电机201、伺服电机301、红外避障传感器模块、压力传感器模块、距离传感器401、摸传感器模块一、触摸传感器模块二、触摸传感器模块三、电源开关、复位脉冲开关和微处理器间电性连接。
75.工作原理及使用方法:
76.预设置:
77.对设备通电,开启电源开关,进行空载调试。
78.工作流程:
79.第一步,将待安装压缩机外箱放置于回字形框上。
80.工作人员对压缩机外箱顶部进行相关设备装配。
81.第二步,工作人员触摸一次触摸传感器模块一,触摸传感器模块一输出信号给微处理器,同时,红外避障传感器和压力传感器均采集信号输出给微处理器(即回字形框上存在压缩机外箱)。
82.微处理器输出信号给推杆电机201,推杆电机201带动回形底框202上移。
83.工作人员对压缩机内箱部分位置的相关设备进行装配。
84.第三步,将“c”形载架303穿过压缩机外箱底部的调节螺孔;之后,工作人员触摸一次触摸传感器模块二,触摸传感器模块二输出信号给微处理器,同时距离传感器401采集信号输出给微处理器(即“c”形载架303在调节螺孔内);则微处理器输出信号给伺服电机301和推杆电机201,伺服电机301转动带动卷轴302,卷轴302通过绳链带动压缩机外箱上移一段距离;推杆电机201复位。
85.工作人员对压缩机内箱部分和压缩机外箱底部相关的设备进行装配。
86.第四步,工作人员触摸一次触摸传感器模块三,触摸传感器模块三输出信号给微处理器,微处理器输出信号给伺服电机301和推杆电机201,伺服电机301转动,带动卷轴302转动,同时,推杆电机201同步上升,卷轴302通过绳链带动压缩机外箱下移一段距离。
87.工作人员将装配好的压缩机搬走,红外避障传感器输出信号给微处理器,微处理器输出信号给推杆电机201,推杆电机201复位。
88.此外,根据场地和人员习惯,还可以让绳链带动压缩机外箱下移至基座102上,或斜拉到转运设备上。
89.复位:
90.在实际操作中,有时需要对设备进行复位,以应对检修和各种意外状况,此时按压
复位脉冲开关,复位脉冲开关输出信号给微处理器,微处理器输出信号给推杆电机201和伺服电机301,推杆电机201和伺服电机301相继复位。
91.转运:
92.操作人员可以通过叉车或拖车,利用基板101上的条形凹槽103对吊装机构进行转运。
93.实施例2,在实施例1的基础上,用双筒卷扬机替换伺服电机301、卷轴302和绳链的组合,降低编程难度。
94.实施例3,在实施例1的基础上,增设万向轮于基板的下底面上,提高其便携性。
95.实施例4,在实施例1的基础上,用“n”形支杆、调节链和承载板的组合替换“l”形支架,实现卷轴位置的高度可控。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。