1.本实用新型涉及管道内部无损检测领域,具体涉及一种爬行机器人结合激光无损检测及清洗系统。
背景技术:
2.在工业生产中一些环境恶劣或难以达到的检测部位,如高温、高压、高湿、易腐蚀及高空的环境,现有的传统的无损检测方法如超声检测、电磁检测、射线检测、涡流检测等无法完全满足现场环境的要求,因此需要一种新的无损检测技术,激光超声检测技术作为一种非接触式的无损检测技术,可以满足在高压、易腐蚀、高空等恶劣环境下的无损检测需要。
3.针对管道检测,因为管道外部带有保温棉或其他一些涂层、高空地下等环境因素的影响,只对管外定点位置进行检测,往往忽略其他有问题的部位,无法进行有效全检。
技术实现要素:
4.本实用新型所要解决的技术问题是提供一种爬行机器人结合激光无损检测及清洗系统,以克服上述现有技术中的不足。
5.本实用新型解决上述技术问题的技术方案如下:一种爬行机器人结合激光无损检测及清洗系统,包括:
6.图像采集模块,其设置于爬行机器人主体上;
7.超声信号接收器,其设置于爬行机器人主体上;
8.旋转机构,其设置于爬行机器人主体上;
9.反射镜,其设置于旋转机构上;
10.柱面镜,其设置于旋转机构上,并位于反射镜的出射端;
11.激光器,其所发射激光通过光纤传导至反射镜;
12.控制单元,其分别与图像采集模块、爬行机器人主体、超声信号接收器、旋转机构电连接。
13.在上述技术方案的基础上,实用新型还可以做如下改进。
14.进一步,旋转机构包括:
15.驱动机构,其设置于爬行机器人主体上;
16.旋转轴,其与驱动机构相固定;
17.安装模块,其设置于旋转轴上,且其上分别设置反射镜和柱面镜。
18.进一步,旋转机构还包括:
19.光纤qbh插口,其设置于旋转轴的端部,激光器所发射激光经光纤传导至光纤qbh插口后再射向反射镜。
20.进一步,还包括:
21.伸缩机构,其设置于爬行机器人主体上,并与超声信号接收器相连,以驱使超声信
号接收器沿管道径向移动。
22.进一步,伸缩机构为液压伸缩杆,其与控制单元电连接。
23.进一步,图像采集模块为360
°
全景相机。
24.进一步,超声信号接收器为电磁超声探头,且具有2mm提离值。
25.进一步,还包括无线通讯模块,其与控制单元电连接。
26.进一步,还包括多个光学防护模块,其分别罩着图像采集模块、反射镜和柱面镜。
27.进一步,光学防护模块上具有气嘴。
28.本实用新型的有益效果是:
29.1)设计特定光路输出,以线激光360
°
环形扫描,通过爬行机器人主体结合激光检测仪器,满足管内全方位激光清洗及检测,结合图像采集,实现高清视觉呈现,大大提高了检测精度,减少了安全隐患;
30.2)可在人工无法作业的场景下作业,例如小管径管道;
31.3)达到随时随地作业无需人工搬运;
32.4)加入无线通讯模块,便于遥控操作。
附图说明
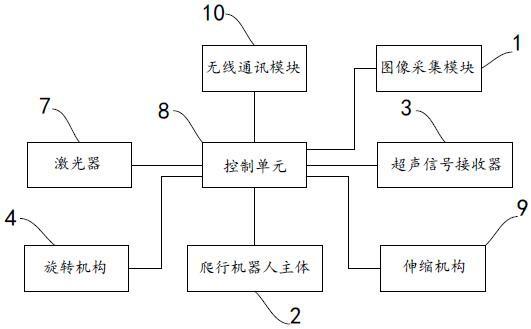
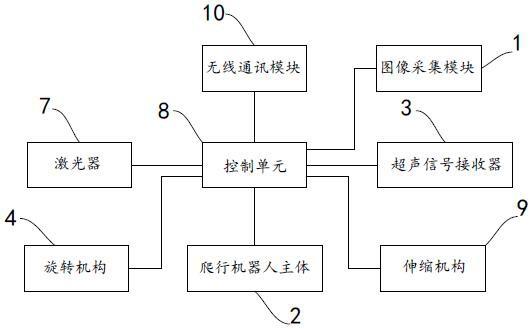
33.图1为实用新型所述爬行机器人结合激光无损检测及清洗系统的结构图;
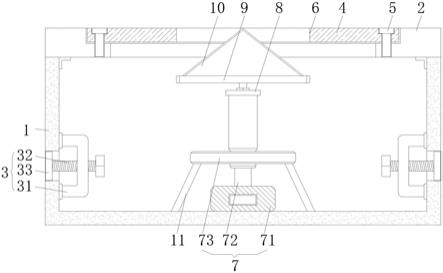
34.图2为实用新型所述旋转机构、反射镜和柱面镜的组装图。
35.附图中,各标号所代表的部件列表如下:
36.1、图像采集模块,2、爬行机器人主体,3、超声信号接收器,4、旋转机构,410、旋转轴,420、安装模块,5、反射镜,6、柱面镜,7、激光器,8、控制单元,9、伸缩机构,10、无线通讯模块。
具体实施方式
37.以下结合附图对实用新型的原理和特征进行描述,所举实例只用于解释实用新型,并非用于限定实用新型的范围。
38.实施例1
39.如图1、图2所示,一种爬行机器人结合激光无损检测及清洗系统,包括:
40.图像采集模块1、爬行机器人主体2、超声信号接收器3、旋转机构4、反射镜5、柱面镜6、激光器7和控制单元8;
41.图像采集模块1设置于爬行机器人主体2上,其用于当爬行机器人主体2在管道内行走过程中采集管道内的图像信息,便于操作人员观察管道内部情况,以实现在线观察,便于对一些肉眼可见的信息进行人眼甄别;
42.超声信号接收器3设置于爬行机器人主体2上,用于对激光所激发的超声信号进行接收;
43.旋转机构4设置于爬行机器人主体2上;
44.反射镜5设置于旋转机构4上,旋转机构4用于驱动反射镜5进行周向转动;
45.柱面镜6设置于旋转机构4上,并且柱面镜6位于反射镜5的出射端;
46.激光器7所发射激光通过光纤传导至反射镜5,激光器7所发射的激光入射在反射
镜5上,经变向后射向柱面镜6,通过柱面镜6的激光将被分成线性光束,旋转机构4驱动反射镜5、柱面镜6进行周向转动时,使得线激光光束旋转形成一个环形扫描,以作用在管道内壁上;
47.图像采集模块1的信号输出端与控制单元8的信号输入端电连接,图像采集模块1可以将所采集的图像信息回传至控制单元8;
48.爬行机器人主体2的信号输入端与控制单元8的信号输出端电连接,通过控制单元8可以控制爬行机器人主体2在管道内行走;
49.超声信号接收器3的信号输出端与控制单元8的信号输入端电连接,超声信号接收器3可以将所获取的超声信号回传至控制单元8;
50.旋转机构4的信号输入端与控制单元8的信号输出端电连接,通过控制单元8可以控制旋转机构4动作,以实现驱动反射镜5、柱面镜6进行周向转动。
51.实施例2
52.如图2所示,本实施例为在实施例1的基础上所进行的进一步优化,其具体如下:
53.旋转机构4包括:驱动机构、旋转轴410和安装模块420;
54.驱动机构设置于爬行机器人主体2上;
55.旋转轴410与驱动机构相固定,通过驱动机构可以驱使旋转轴410进行转动;
56.安装模块420设置于旋转轴410上,在旋转轴410进行转动后,将促使安装模块420跟随转动;
57.而反射镜5和柱面镜6分别安装在安装模块420上。
58.实施例3
59.如图1所示,本实施例为在实施例2的基础上所进行的进一步优化,其具体如下:
60.旋转机构4还包括:光纤qbh插口,光纤qbh插口设置于旋转轴410的端部,激光器7所发射激光经光纤传导至光纤qbh插口后再射向反射镜5。
61.实施例4
62.如图1所示,本实施例为在实施例1或2或3的基础上所进行的进一步优化,其具体如下:
63.爬行机器人结合激光无损检测及清洗系统还包括:伸缩机构9,伸缩机构9设置于爬行机器人主体2上,伸缩机构9与超声信号接收器3相连,以驱使超声信号接收器3沿管道径向移动,伸缩机构9可以使得超声信号接收器3与管道内部管壁实时接触,以确保超声信号采集效果。
64.实施例5
65.如图1所示,本实施例为在实施例4的基础上所进行的进一步优化,其具体如下:
66.伸缩机构9优选为液压伸缩杆,伸缩机构9与控制单元8电连接,即通过控制单元8可以控制伸缩机构9动作。
67.实施例6
68.如图1所示,本实施例为在实施例1~5任一实施例的基础上所进行的进一步优化,其具体如下:
69.图像采集模块1优选采用360
°
全景相机,可以全方位观察管道内壁情况。
70.实施例7
71.如图1所示,本实施例为在实施例1~6任一实施例的基础上所进行的进一步优化,其具体如下:
72.超声信号接收器3为电磁超声探头,且具有2mm提离值。
73.对于各实施例而言,爬行机器人主体2具有前进后退功能,采用常规结构即可,如包含爬行机器人主体机械模块、爬行机器人驱动模块、爬行机器人控制模块,爬行机器人驱动模块搭载于爬行机器人主体机械模块上,用以驱动爬行机器人主体机械模块行走,而爬行机器人控制模块搭载在爬行机器人主体机械模块上,并与爬行机器人驱动模块电连接,控制单元8与爬行机器人控制模块电连接。
74.实施例8
75.如图1所示,本实施例为在实施例1~7任一实施例的基础上所进行的进一步优化,其具体如下:
76.爬行机器人结合激光无损检测及清洗系统还包括无线通讯模块10,无线通讯模块10与控制单元8电连接,人工控制端可以通过无线通讯模块10与控制单元8建立无线连接,以实现远程控制。
77.实施例9
78.如图1所示,本实施例为在实施例1~8任一实施例的基础上所进行的进一步优化,其具体如下:
79.爬行机器人结合激光无损检测及清洗系统还包括多个光学防护模块,多个光学防护模块分别罩着图像采集模块1、反射镜5和柱面镜6,防止灰尘或其他污染物遮挡图像采集模块1、反射镜5和柱面镜6,光学防护模块可以为由平面镜制成的防护罩,其上具有气嘴,通过气嘴向内通入气体,实现将内部灰尘或其他污染物吹离。
80.以270mm钢管内部清洗为例,但不局限此类工件:
81.将整体设备放入管口,通过爬行机器人主体2使设备进入管道内部;
82.开启图像采集模块1,图像采集模块1将所采集图像信息通过控制单元8、无线通讯模块回传至人工控制端,观察内部情况,查看是否有大面积的腐蚀等重大问题;
83.由于管道内部长期没有维修,清理,内部附着物或沉积物较多,先清洗,再进行检测,调节激光器7功率频率,使达到清洗无损区间,启动旋转机构4,旋转机构4驱使反射镜5、柱面镜6转动,激光器7所发射的激光入射在反射镜5上,经变向后射向柱面镜6,通过柱面镜6的激光将被分成线性光束,旋转机构4驱动反射镜5、柱面镜6进行周向转动时,使得线激光光束旋转形成一个环形扫描,以作用在管道内壁上,实现清洗,可以以10米为一个单位进行清洗;
84.清洗完毕后,控制伸缩机构9动作,使超声信号接收器3与内部管壁实时接触;
85.从清洗完毕一端往开始端倒退式检测,此时调节激光器7功率,达到无损检测需求,调节旋转机构4旋转速度,达到与检测要求匹配;
86.如此往复先清洗后检测,每一次清洗后用图像采集模块1检测下可见缺陷,并拍照记录。
87.尽管上面已经示出和描述了实用新型的实施例,可以理解的是,上述实施例是示例性的,不能理解为对实用新型的限制,本领域的普通技术人员在实用新型的范围内可以对上述实施例进行变化、修改、替换和变型。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。