1.本公开的实施例涉及机械领域,尤其涉及机器人领域,具体涉及一种底盘及可移动机器人。
背景技术:
2.当前,各种类型的可移动机器人的应用场景也越来越广泛,例如agv(automated guided vehicle,无人搬运车)或amr(autonomous mobile robot,自主移动机器人),可以运送餐饮物品、医疗物品、垃圾等。
3.相关技术中,为了提高可移动机器人行进过程中的转向灵活度,通常在可移动机器人的底盘配备万向轮,而万向轮与可移动机器人的底盘之间的连接是刚性的。在实际应用中,若地面的平整程度较低,则会导致可移动机器人的晃动幅度较大,存在安全隐患。
技术实现要素:
4.本公开的实施例提出了一种底盘及可移动机器人。
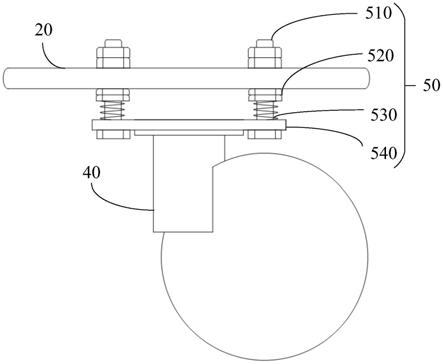
5.第一方面,本公开的实施例提供了一种底盘,用于可移动机器人,包括底盘本体、驱动轮以及承载底盘本体的安装板,驱动轮用于带动底盘移动,底盘还包括连接组件和第一万向轮,其中,连接组件包括连接板、螺栓、调节螺母和弹簧,连接板通过螺栓固定于安装板的下方;调节螺母与螺栓啮合,且位于连接板与安装板之间;弹簧套设于螺栓上,且位于连接板和调节螺母之间;第一万向轮与连接板固定连接,且位于连接板的下方。
6.在一些实施例中,该底盘还包括第二万向轮,第二万向轮与安装板固定连接,且位于安装板的下方。
7.在一些实施例中,底盘本体还包括承载平台,承载平台包括安装孔。
8.在一些实施例中,底盘本体还包括激光雷达。
9.在一些实施例中,底盘还包括防跌落传感器,设置于安装板的下表面。
10.第二方面,本公开的实施例还提供了一种可移动机器人,包括可移动机器人的本体以及上述任一实施例中的底盘,其中,底盘用于承载可移动机器人的本体。
11.本公开的实施例提供的底盘,通过连接组件与第一万向轮连接,连接组件中的弹簧压缩于调节螺母与连接板之间,既可以为第一万向轮提供缓冲能力,又可以通过调整调节螺母与螺栓的啮合位置,以改变弹簧的压缩量,从而改变第一万向轮与的悬挂硬度,提高了底盘对不同类型的地面的适应能力。
附图说明
12.通过阅读参照以下附图所作的对非限制性实施例所作的详细描述,本公开的其它特征、目的和优点将会变得更明显:
13.图1是本公开的底盘的一个实施例的总体结构示意图;
14.图2是本公开的底盘的一个实施例中连接组件的结构示意图;
15.图3是本公开的底盘的又一个实施例总体的结构示意图;
16.图4是本公开的底盘的一个具体实施例的总体结构示意图;
17.附图标记:10
‑
底盘本体;20
‑
安装板;30
‑
驱动轮;40
‑
第一万向轮;50
‑
连接组件;60
‑
防跌落传感器;70
‑
把手;80
‑
驱动组件;90
‑
第二万向轮;
18.110
‑
承载平台;120
‑
激光雷达;
19.510
‑
螺栓;520
‑
调节螺母;530
‑
弹簧;540
‑
连接板。
具体实施方式
20.下面结合附图和实施例对本公开作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释相关发明,而非对该发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与有关发明相关的部分。
21.需要说明的是,在不冲突的情况下,本公开中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本公开。
22.请参考图1和图2,图1示出了本公开的底盘的第一个实施例的总体结构示意图,图2示出了本公开的底盘的一个实施例中悬挂组件的结构示意图。
23.如图1所示,本公开的实施例提供了一种底盘,用于可移动机器人,包括:底盘本体10、驱动轮30以及承载底盘本体10的安装板20,驱动轮30用于带动底盘移动,进一步参考图2,底盘还包括连接组件50和第一万向轮40,其中,连接组件50包括连接板540、螺栓510、调节螺母520和弹簧530,连接板540通过螺栓510固定于安装板20的下方;调节螺母520与螺栓510啮合,且位于连接板540与安装板20之间;弹簧530套设于螺栓510上,且位于连接板540和调节螺母520之间;第一万向轮40与连接板540固定连接,且位于连接板540的下方。
24.在本实施例中,底盘本体10用于连接可移动机器人的本体,可移动机器人的本体为可移动机器人的功能组件,用于实现预设的功能,例如可以是搬运或拣取。底盘为可移动机器人的运动组件,用于实现可移动机器人的运动。可以在底盘本体10上设置与可移动机器人本体匹配的安装结构,在实际应用时,只需将可移动机器人的本体安装在底盘上即可。底盘本体10还可以承载驱动轮30的驱动装置,例如电机、控制器等。
25.进一步地,本实施例中的底盘本体10上可以设置多个类型的安装结构,对应于多种类型的可移动机器人的本体,如此,底盘具备通用性,可以适用于多种类型的可移动机器人的本体。
26.在本实施例中,弹簧530被调节螺母520和连接板540压缩,可以将弹簧530压缩产生的弹力转化为第一万向轮40的压力,一方面,与相关技术中采用刚性连接的固定万向轮相比,连接组件50可以为第一万向轮40提供缓冲能力,对于平整度较低的地面,本实施例中的底盘的行进过程更加平稳。另一方面,改变弹簧530的压缩力即可调整第一万向轮40的悬挂硬度。在实际应用中,可以根据底盘在行进过程中的运动状态(例如底盘的晃动幅度、越障能力等),进行针对性的调整。
27.作为示例,调节螺母520可以采用双螺母,如此可以使得调节螺母520具备自锁功能。
28.本公开的实施例提供的底盘,通过连接组件50与第一万向轮40连接,连接组件50中的弹簧530压缩于调节螺母520与连接板540之间,通过调整调节螺母520与螺栓510的啮
合位置,可以改变弹簧530的压缩量,以此改变第一万向轮40与的悬挂硬度,提高了底盘对不同类型的地面的适应能力。
29.在本实施例的一些可选的实现方式中,该底盘还包括第二万向轮90,第二万向轮90与安装板20固定连接,且位于安装板20的下方。
30.在本实现方式中,第二万向轮90直接与安装板20连接,第二万向轮90与底盘之间属于刚性连接,即底盘同时配备了具有缓冲能力的第一万向轮40和刚性连接的第二万向轮90,使得底盘具备一定的缓冲能力的同时,可以保证足够的刚性,从而进一步提高了底盘行进过程中的平稳性。
31.接下来参考图3,图3示出了本公开的底盘的又一个实施例的总体结构示意图,如图3所示,底盘本体10还包括承载平台110,承载平台110包括安装孔。
32.在本实施例中,承载平台110可以用于连接可移动机器人的本体,相应的,承载平台110上的安装孔可连接直接与某些特定的功能组件,例如机械臂,此时安装孔可以与机械臂底座上的安装结构匹配。
33.进一步地,本实施例中的安装孔可以包括多种类型,对应于多种类型的可移动机器人的本体或其他功能组件。如此,可以进一步提高底盘在实际应用中的灵活性。
34.在本实施例的一些可选的实现方式中,底盘本体10还包括激光雷达120。激光雷达120可以用于检测底盘行进过程中的障碍物,结合对应的算法,可以提高底盘的避障能力。
35.在本实施例的一些可选的实现方式中,底盘还包括防跌落传感器60,设置于安装板20的下表面。
36.作为示例,可以采用光电传感器作为防跌落传感器60,通过实时监测底盘与地面之间的夹角,确定底盘的晃动幅度,当夹角过大时,可以触发报警信号,用于提示工作人员调整调节螺母520的位置,以调整第一万向轮40的悬挂硬度,以免晃动幅度过大,导致承载的物品跌落。
37.接下来参考图4,图4示出了本公开的底盘的一个具体示例的结构示意图,在图4所示的示例中,底盘的安装板20上可以装载有第一万向轮40、第二万向轮90、驱动组件80(例如可以是驱动轮30的控制器)、驱动轮30、把手70、防跌落传感器60。
38.本公开的实施例还提供了一种可移动机器人,包括可移动机器人的本体以及上述任一实施例中的底盘,其中,底盘用于承载可移动机器人的本体。
39.本实施例中的可移动机器人,底盘通过连接组件与第一万向轮连接,由于连接组件中的弹簧压缩于调节螺母与连接板之间,一方面可以为可移动机器人提供缓冲能力,可以提高可移动机器人在平整度较低的地面上的平稳度;另一方面,可以通过调整调节螺母与螺栓的啮合位置,改变第一万向轮的悬挂硬度,可以提高可移动机器人对于不同地面的适应能力。
40.以上描述仅为本公开的较佳实施例以及对所运用技术原理的说明。本领域技术人员应当理解,本公开的实施例中所涉及的发明范围,并不限于上述技术特征的特定组合而成的技术方案,同时也应涵盖在不脱离上述发明构思的情况下,由上述技术特征或其等同特征进行任意组合而形成的其它技术方案。例如上述特征与本公开的实施例中公开的(但不限于)具有类似功能的技术特征进行互相替换而形成的技术方案。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。