1.本发明涉及农用无人机技术领域,尤其涉及一种便于控制飞行姿态的农业植保无人机。
背景技术:
2.植保无人机,顾名思义是用于农林植物保护作业的无人驾驶飞机,该型无人飞机有飞行平台(固定翼、单旋翼、多旋翼)、gps飞控、喷洒机构三部分组成,通过地面遥控或gps飞控,来实现喷洒作业,可以喷洒药剂、种子、粉剂等。
3.如授权公告号为cn205652351u所公开的一种能稳定飞行的耐用型六旋翼飞行器,包括飞行器主体,所述飞行器主体的外表面连接有呈中心对称分布的合金支杆,所述合金支杆的一侧设有飞行加稳装置,合金支杆的一端连接有的支撑架顶部设有主旋翼。
4.现有的植保无人机中,提供动力的机翼的动力数据为机臂长度和机翼组件提供的上升力,很多四翼无人机的中机翼调节飞行姿态时,通过机翼正反转和功率改变无人机的各侧动力,但是在飞行中通过农药壶体中的液位震动会影响飞行稳定性,造成飞行姿态的控制不足,在喷洒时,不利于快速变化飞行路径,不便于无人机的作业路径调节。
技术实现要素:
5.本发明提出的一种便于控制飞行姿态的农业植保无人机,解决了飞行姿态控制不稳定和农药壶体的震动影响飞行姿态的问题。
6.为了实现上述目的,本发明采用了如下技术方案:一种便于控制飞行姿态的农业植保无人机,包括机体,所述机体的外壁等距离环形连接有六个电动液压杆体,所述机体的底端外壁对称设有起落架,所述机体的底端外壁中部设有固定盘;机翼组件,所述机翼组件设于所述电动液压杆体的端部外壁上,所述机翼组件用于提供无人机动力;所述机翼组件包括无刷电机、螺旋桨、电机座、测距仪和密封盖,所述无刷电机设于电机座的底端内部,所述螺旋桨设于无刷电机的输出轴上,所述密封盖的外边卡接在电机座的顶端内边上,所述无刷电机的外壁和电机座的内壁四侧均设有减震衬垫,所述测距仪设于电机座的外壁靠近电动液压杆体的一侧,且测距仪和电动液压杆体之间通过电性连接;液壶组件,所述固定盘的底端外壁中部设有螺纹套,所述液壶组件的端部固定连接至螺纹套,所述起落架的两侧之间设有壶体固定架,且液壶组件的外壁卡接在壶体固定架的内壁上,所述液壶组件的端部外壁设有输液管,所述电机座的底端外壁设有农药喷头,且输液管的端部和农药喷头的侧壁相连接,所述输液管的中部设有微型液泵;所述液壶组件包括壶体和壶体件,且壶体件设于壶体的内部中部,所述壶体件包括液位计和减震件,所述减震件等距离环形分布在液位计的外侧,所述减震件用于对壶体内液体震荡抑制,所述液位计用于对壶体内的液位监测;倾角传感器,所述倾角传感器设于机体的底端外壁上,且倾角传感器的位置与每个电动液压杆体的连接处同轴,所述倾角传感器用于检测无人机机体的飞行姿态并联动机翼组件和电动液压杆体;监测盒,所述监测盒的内部设
有风速传感器、温湿度传感器和姿态传感器,所述监测盒用于监测无人机的飞行环境并联动机翼组件和电动液压杆体。
7.作为本发明中进一步方案,所述输液管的底端连接有吸取头,所述壶体的顶端外壁等距离环形分布有插管孔,且输液管连接有吸取头的一端插接在插管孔的内部。
8.作为本发明中进一步方案,所述电动液压杆体包括固定杆、伸缩杆和电动液压杆,所述电动液压杆位于固定杆和伸缩杆之间,所述电动液压杆的伸缩量可监测。
9.作为本发明中进一步方案,所述壶体的顶部外壁中部设有固定螺头,且固定螺头的外壁通过螺纹连接至螺纹套。
10.作为本发明中进一步方案,所述壶体的一侧外壁设有刻度线和警戒线。
11.作为本发明中进一步方案,所述减震件包括减震板和转动球,所述减震板的中部设有通槽,且转动球通过轴平行设于通槽的内侧之间,所述转动球包括转动轴和半圆叶片,所述半圆叶片等距离环形分布在转动轴的外壁上,所述转动球用于对震荡液面的减震。
12.作为本发明中进一步方案,所述壶体固定架的内侧设有胶圈,且胶圈套接在壶体的外壁上。
13.作为本发明中进一步方案,所述起落架的底端内壁卡接有减震胶垫。
14.与现有的技术相比,本发明的有益效果是:1.本无人机中在传统的机翼杆体基础上变更呈可伸缩杆体,可通过改变力臂长度,对机体的飞行姿态进行矫正和补充,提高在飞行姿态变化过程中的效率提升,同时在每个机翼臂体端部设有倾角传感器,可对无人机的飞行姿态进行精准检测,利用传感器对每个机翼的动力分配,便于快速控制和修正,提高飞行稳定性;2.本无人机中在传统的药壶结构中加入了减震件,减震件通过隔板式结构可减少内部农药液体在飞行姿态改变时的振动幅度,同时转动球可对液面振动时产生的壶体侧壁压力转化成球体的转动动力,实现快速的减震效果,使壶体内药液对飞行姿态的影响缩减到合理范围;3.本无人机中在顶部设有监测盒,独立检测飞行环境,例如风速、温湿度等,可根据环境变更飞行高度和姿态,减少无人机受环境因素的影响,提高飞行安全性。
附图说明
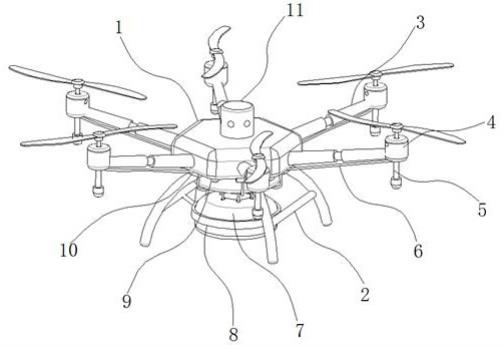
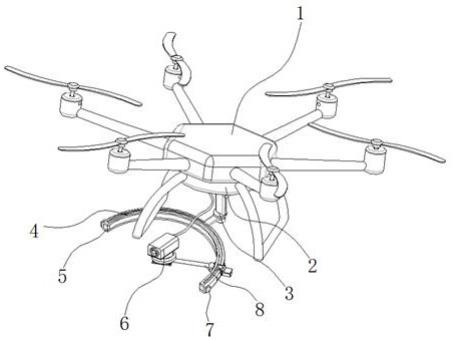
15.图1为本发明提出的一种便于控制飞行姿态的农业植保无人机的实施例1中的立体结构示意图;图2为图1中的机体和液壶组装结构示意图;图3为本发明提出的一种便于控制飞行姿态的农业植保无人机的实施例1中的机体结构示意图;图4为本发明提出的一种便于控制飞行姿态的农业植保无人机的实施例1中的液壶组件结构示意图;图5为图4中的俯视结构示意图;图6为图5中的a
‑
a剖面结构示意图;图7为本发明提出的一种便于控制飞行姿态的农业植保无人机的实施例1中的减震件结构示意图;
图8为本发明提出的一种便于控制飞行姿态的农业植保无人机的实施例2中的壶体剖面结构示意图;图9为本发明提出的一种便于控制飞行姿态的农业植保无人机的实施例2中的浮板件结构示意图。
16.图中:1、机体;2、起落架;3、电动液压杆体;4、机翼组件;41、无刷电机;42、密封盖;43、螺旋桨;44、电机座;45、测距仪;5、农药喷头;6、输液管;61、吸取头;7、液壶组件;71、插管孔;72、壶体;73、固定螺头;74、刻度线;75、壶体件;751、液位计;752、减震件;7521、减震板;7522、转动球;753、浮板件;7531、浮板;7532、支撑弹簧;7533、橡胶垫;7534、液位传感器;8、壶体固定架;9、倾角传感器;10、微型液泵;11、监测盒;12、固定盘;13、螺纹套。
具体实施方式
17.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
18.在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
19.实施例1参照图1
‑
7:一种便于控制飞行姿态的农业植保无人机,包括机体1,机体1的外壁等距离环形连接有六个电动液压杆体3,机体1的底端外壁对称设有起落架2,起落架2的底端内壁卡接有减震胶垫,机体1的底端外壁中部设有固定盘12;机翼组件4,机翼组件4设于电动液压杆体3的端部外壁上,机翼组件4用于提供无人机动力;电动液压杆体3包括固定杆、伸缩杆和电动液压杆,电动液压杆位于固定杆和伸缩杆之间,电动液压杆的伸缩量可监测,电动液压杆体3为可变力臂;机翼组件4包括无刷电机41、螺旋桨43、电机座44、测距仪45和密封盖42,无刷电机41设于电机座44的底端内部,螺旋桨43设于无刷电机41的输出轴上,密封盖42的外边卡接在电机座44的顶端内边上,无刷电机41的外壁和电机座44的内壁四侧均设有减震衬垫,测距仪45的型号为hc
‑
sr04,测距仪45设于电机座44的外壁靠近电动液压杆体3的一侧,且测距仪45和电动液压杆体3之间通过电性连接;液壶组件7,固定盘12的底端外壁中部设有螺纹套13,液壶组件7的端部固定连接至螺纹套13,起落架2的两侧之间设有壶体固定架8,且液壶组件7的外壁卡接在壶体固定架8的内壁上,壶体固定架8的内侧设有胶圈,且胶圈套接在壶体72的外壁上;液壶组件7的端部外壁设有输液管6,电机座44的底端外壁设有农药喷头5,且输液管6的端部和农药喷头5的侧壁相连接,输液管6的中部设有微型液泵10;输液管6的底端连接有吸取头61,壶体72的顶端外壁等距离环形分布有插管孔71,且输液管6连接有吸取头61的一端插接在插管孔71的内部;液壶组件7包括壶体72和壶体件75,且壶体件75设于壶体72的内部中部,壶体件75包括液位计751和减震件752,减震件752等距离环形分布在液位计751的外侧,减震件752用于对壶体内液体震荡抑制,减震件752包括减震板7521和转动球7522,减震板7521的中部设
有通槽,且转动球7522通过轴平行设于通槽的内侧之间,转动球7522包括转动轴和半圆叶片,半圆叶片等距离环形分布在转动轴的外壁上,转动球7522用于对震荡液面的减震;液位计751用于对壶体内的液位监测;壶体72的顶部外壁中部设有固定螺头73,且固定螺头73的外壁通过螺纹连接至螺纹套13;壶体72的一侧外壁设有刻度线74和警戒线;倾角传感器9,倾角传感器9的型号为ch100,倾角传感器9设于机体1的底端外壁上,且倾角传感器9的位置与每个电动液压杆体3的连接处同轴,倾角传感器9用于检测无人机机体的飞行姿态并联动机翼组件4和电动液压杆体3;监测盒11,监测盒11的内部设有风速传感器、温湿度传感器和姿态传感器,风速传感器的型号为420ma,温湿度传感器的型号为sht20,姿态传感器的型号为wt901sdcl,监测盒11用于监测无人机的飞行环境并联动机翼组件4和电动液压杆体3。
20.本农业植保无人机的工作原理具体如下:第一,本无人机使用时,通过电动液压杆体3形成可调节的力臂,可通过改变力臂长度对机体的飞行姿态进行矫正和补充,配合上六翼无人机的各个机翼臂上无刷电机41的转速和转动方向调节配合,实现了无人机的飞行姿态变化;第二,无人机飞行和姿态变化时,通过每个机翼臂体端部设有倾角传感器9,可对无人机的飞行姿态进行精准检测,利用传感器对每个机翼的动力分配,便于快速控制和修正,提高飞行稳定性;第三,无人机的飞行环境利用监测盒11中的多种传感器检测,在一些风速较大和温湿度较高的环境下,可通过降低飞行高度和飞行姿态矫正频率,提高了飞行安全性;第四,在喷洒农药时,农药液壶中液面随着飞行姿态变化时,内部药液的振荡会被减震件752削弱,减少液面的振动对机体的飞行姿态稳定性的影响,其中减震板7521减弱液面振动带来的侧向挤压,转动球可对液面振动时产生的壶体侧壁压力转化成球体的转动动力,实现快速的减震效果,保证了飞行稳定性。
21.实施例2参照图1和图8
‑
9:一种便于控制飞行姿态的农业植保无人机,本实施例中相对于实施例1,主要区别在于本实施例中,还包括浮板件753,其中浮板件753替代了实施例1中的隔板结构的减震件752,其中浮板件753包括浮板7531、支撑弹簧7532、橡胶垫7533,其中支撑弹簧7523的端部连接至橡胶垫7533,另一端连接至浮板7531的侧边,橡胶垫7533和壶体的侧边有一定间隙,在液面震动时,橡胶垫7533接触壶壁,侧向支撑,同时中心浮板会压制住液面震动激起,同时弹簧和橡胶垫7533对侧向的震动过滤,浮板和液面上表面的张力,会使液面上下的振动减弱,保证了壶体对飞行姿态的影响,隔板状会占用壶体的载液量,故实施例2在实施例1的作用下,采用浮板结构。
22.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。