1.本技术涉及医疗设备技术领域,尤其涉及一种核磁共振兼容液压驱动位置调整平台。
背景技术:
2.经皮穿刺术是临床中常见的一种微创外科手术,其目的是建立引导通道,包括血管通道与非血管通道,几乎所有的介入手术与活检手术都要依赖这种引导通道来完成。现有的临床手动穿刺在很大程度上仍需要依靠医生的职业技能与积攒的多年经验才能完成,其手术过程为外科医生先对病人进行mri扫描,确定穿刺目标,再将病人带到扫描舱外进行手动穿刺操作,最后还要将病人推回扫描舱,以确定穿刺的准确性,手术流程复杂,耗费时间长,并且患者的频繁移动会降低手术的准确性,也即是现有的穿刺手术存在稳定性差和准确性不高等不足。
技术实现要素:
3.有鉴于此,本技术的目的是提供一种核磁共振兼容液压驱动位置调整平台,有助于提高穿刺稳定性以及准确性,节约手术流程,提高手术效率。
4.为达到上述技术目的,本技术提供了一种核磁共振兼容液压驱动位置调整平台,包括平台主体、动力装置以及控制装置;
5.所述平台主体包括固定架、第一支撑架、第二支撑架、第三支撑架、第一单作用液压缸、第二单作用液压缸以及第三单作用液压缸;
6.所述控制装置用于通过所述动力装置分别控制所述第一单作用液压缸、第二单作用液压缸以及第三单作用液压缸;
7.所述动力装置包括第一动力源、第二动力源以及第三动力源;
8.所述第一支撑架沿z轴方向滑动安装于所述固定架上;
9.所述第一单作用液压缸用于驱动所述第一支撑架运动;
10.所述第一动力源包括第一注射器以及第一滚珠丝杆机构;
11.所述第一注射器与所述第一单作用液压缸一一对应,且注射口通过第一导管与所述第一单作用液压缸的连通口连通,所述第一注射器的筒体固定设置;
12.所述第一滚珠丝杆机构的驱动端与所述第一注射器连接,用于驱动所述第一注射器的活塞杆运动;
13.所述第二支撑架沿y轴方向滑动安装于所述第一支撑架;
14.所述第二单作用液压缸用于驱动所述第二支撑架运动;
15.所述第二动力源包括第二注射器以及第二滚珠丝杆机构;
16.所述第二注射器与所述第二单作用液压缸一一对应,且注射口通过第二导管与所述第二单作用液压缸的连通口连通,所述第二注射器的筒体固定设置;
17.所述第二滚珠丝杆机构的驱动端与所述第二注射器连接,用于驱动所述第二注射
器的活塞杆运动;
18.所述第三支撑架沿x轴方向滑动安装于所述第二支撑架上;
19.所述第三单作用液压缸用于驱动所述第三支撑架运动;
20.所述第三动力源包括第三注射器以及第三滚珠丝杆机构;
21.所述第三注射器与所述第三单作用液压缸一一对应,且注射口通过第三导管与所述第三单作用液压缸的连通口连通,所述第三注射器的筒体固定设置;
22.所述第三滚珠丝杆机构的驱动端与所述第三注射器连接,用于驱动所述第三注射器的活塞杆运动。
23.进一步地,所述第一滚珠丝杆机构、所述第二滚珠丝杆机构以及所述第三滚珠丝杆机构均包括安装座、丝杆、滑块以及步进电机;
24.所述丝杆枢接于所述安装座;
25.所述滑块滑动安装于所述安装座,且供所述丝杆穿过;
26.所述丝杆与所述滑块螺纹配合;
27.所述步进电机安装于所述安装座上,且输出轴与所述丝杆连接,用于驱动所述丝杆转动;
28.所述第一注射器的筒体与所述第一滚珠丝杆机构的所述安装座固定连接;
29.所述第一注射器的活塞杆与所述第一滚珠丝杆机构的所述滑块连接;
30.所述第二注射器的筒体与所述第二滚珠丝杆机构的所述安装座固定连接;
31.所述第二注射器的活塞杆与所述第二滚珠丝杆机构的所述滑块连接;
32.所述第三注射器的筒体与所述第三滚珠丝杆机构的所述安装座固定连接;
33.所述第三注射器的活塞杆与所述第三滚珠丝杆机构的所述滑块连接。
34.进一步地,所述固定架包括四个固定座;
35.四个所述固定座呈矩形分布,且顶部分别垂直设有导杆部;
36.所述第一支撑架包括四个支撑座以及两个第一导轨;
37.所述四个所述支撑座一一对应安装于所述固定座顶部,且分别设有供对应的所述导杆部穿过的导筒部;
38.四个所述支撑座两两分成两组;
39.各个所述第一导轨分别连接于各组中所述支撑座之间,且两个所述第一导轨平行设置;
40.所述第二支撑架滑动安装于所述第一导轨;
41.所述第一单作用液压缸为四个;
42.四个所述第一单作用液压缸一一对应安装于所述支撑座顶部,且伸缩端向下活动穿出所述支撑座并与所述固定座连接;
43.还包括第一直线编码器;
44.所述第一直线编码器包括第一光栅尺以及第一读头;
45.所述第一光栅尺沿所述第一支撑架的滑动方向安装于一所述固定座;
46.所述第一读头包括第一读头本体、第一发送光纤、第一接收光纤、第一光源、第一光接收器;
47.所述第一读头本体安装于与一所述固定座对应的所述支撑座上且与所述第一光
栅尺配合;
48.所述第一光源以及所述第一光接收器均安装于所述第一读头本体外;
49.所述第一发送光纤一端与所述第一光源连接,另一端与所述第一读头本体连接,用于将所述第一光源发出的光信号传递至所述第一光栅尺;
50.所述第一接收光纤一端与所述第一光接收器连接,另一端与所述第一读头本体连接,用于将穿过所述第一光栅尺的光信号传递至第一光接收器。
51.进一步地,所述第二支撑架包括两个第一轴承盒以及两个第二导轨;
52.两个所述第一轴承盒一一对应地滑动套设于所述第一导轨;
53.两个所述第二导轨连接于两个所述第一轴承盒之间,且两个所述第二导轨平行间隔设置;
54.还包括第二直线编码器;
55.所述第二直线编码器包括第二光栅尺以及第二读头;
56.所述第二光栅尺沿所述第一轴承盒滑动方向安装于一组所述支撑座之间;
57.所述第二读头包括第二读头本体、第二发送光纤、第二接收光纤、第二光源、第二光接收器;
58.所述第二读头本体安装在一组所述支撑座之间的所述第一轴承盒上且与所述第二光栅尺配合;
59.所述第二光源以及所述第二光接收器均安装于所述第二读头本体外;
60.所述第二发送光纤一端与所述第二光源连接,另一端与所述第二读头本体连接,用于将所述第二光源发出的光信号传递至所述第二光栅尺;
61.所述第二接收光纤一端与所述第二光接收器连接,另一端与所述第二读头本体连接,用于将穿过所述第二光栅尺的光信号传递至第二光接收器。
62.进一步地,所述第一轴承盒包括第一盒体、多个第一轴承以及多个第一限位柱;
63.所述第一盒体设有供所述第一导轨穿过的第一通腔;
64.各个所述第一轴承一一对应通过所述第一限位柱固定于所述第一通腔内,各个所述第一轴承绕所述第一导轨圆周分布,且与所述第一导轨滚动接触。
65.进一步地,所述第二单作用液压缸为四个;
66.四个所述第二单作用液压缸分别一一对应安装于所述支撑座,且两两分成两组;
67.各组中的两个所述第二单作用液压缸的伸缩端相向设置,且与所述第一轴承盒连接;
68.所述第二滚珠丝杆机构为两个;
69.所述第二注射器为四个;
70.四个所述第二注射器两两分成两组,各组所述第二注射器与所述第二滚珠丝杆机构一一对应;
71.各组中的两个所述第二注射器的注水后相背离设置;
72.所述第二滚珠丝杆机构用于一同驱动对应的一组中的两个所述第二注射器的活塞杆。
73.进一步地,所述第三支撑架包括两个第二轴承盒;
74.两个所述第二轴承盒一一对应地滑动套设于所述第二导轨。
75.进一步地,所述第三单作用液压缸安装于两个所述第二轴承盒之间,且伸缩端与一所述第一轴承盒连接。
76.进一步地,所述第二轴承盒包括第二盒体、多个第二轴承以及多个第二限位柱;
77.所述第二盒体设有供所述第二导轨穿过的第二通腔;
78.各个所述第二轴承一一对应通过所述第二限位柱固定于所述第二通腔内,各个所述第二轴承绕所述第二导轨圆周分布,且与所述第二导轨滚动接触。
79.进一步地,还包括第三直线编码器;
80.所述第三直线编码器包括第三光栅尺以及第三读头;
81.所述第三光栅尺沿所述第二轴承盒滑动方向安装于一所述第二导轨的旁侧;
82.所述第三读头包括第三读头本体、第三发送光纤、第三接收光纤、第三光源、第三光接收器;
83.所述第三读头本体安装于一所述第二轴承盒上且与所述第三光栅尺配合;
84.所述第三光源以及所述第三光接收器均安装于所述第三读头本体外;
85.所述第三发送光纤一端与所述第三光源连接,另一端与所述第三读头本体连接,用于将所述第三光源发出的光信号传递至所述第三光栅尺;
86.所述第三接收光纤一端与所述第三光接收器连接,另一端与所述第三读头本体连接,用于将穿过所述第三光栅尺的光信号传递至第三光接收器。
87.从以上技术方案可以看出,本技术基于液压缸模块来构建平台主体,能够满足非金属需求,实现平台主体整体非金属设计目的,从而能够具备核磁共振兼容性,能够兼容mri设备或直接应用在mri设备上,进而使得该平台能够应用于穿刺手术中,实现自动化的穿刺,进而有助于提高穿刺稳定性以及准确性,节约手术流程,提高手术效率。而且各个动力源设计为由注射器以及滚珠丝杆机构构建,较于传统的液压泵系统来说更加轻便,使用更加便利。
附图说明
88.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其它的附图。
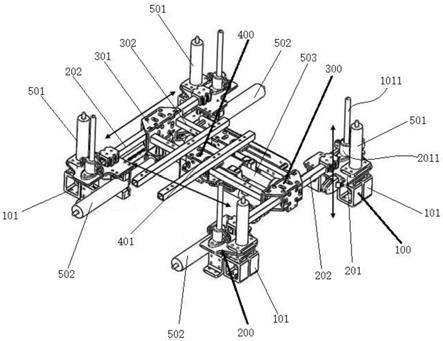
89.图1为本技术中提供的一种核磁共振兼容液压驱动位置调整平台的平台主体结构示意图;
90.图2为本技术中提供的一种核磁共振兼容液压驱动位置调整平台的第二动力源结构示意图;
91.图3为本技术中提供的一种核磁共振兼容液压驱动位置调整平台的第二动力源与第二单作用液压缸配合的等效示意图;
92.图4为本技术中提供的一种核磁共振兼容液压驱动位置调整平台的第一轴承盒的局部结构示意图;
93.图5为本技术中提供的一种核磁共振兼容液压驱动位置调整平台的第一直线编码器结构示意图;
94.图中:100、固定架;101、固定座;1011、导杆部;200、第一支撑架;201、支撑座;2011、导筒部;202、第一导轨;300、第二支撑架;301、第一轴承盒;3011、第一盒体;3012、第一限位柱;3013、第一轴承;3014、陶瓷螺丝;302、第二导轨;400、第三支撑架;401、第二轴承盒;501、第一单作用液压缸;502、第二单作用液压缸;503、第三单作用液压缸;600、第二动力源;601、安装座;602、步进电机;603、滑块;604、丝杆;605、第二注射器;701、第一光栅尺;7021、第一读头本体;7022、第一发送光纤;7023、第一光源;7024、第一接收光纤;7025、第一光接收器。
具体实施方式
95.下面将结合附图对本技术实施例的技术方案进行清楚、完整地描述,显然,所描述的实施例是本技术实施例一部分实施例,而不是全部的实施例。基于本技术实施例中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术实施例保护的范围。
96.在本技术实施例的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术实施例和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术实施例的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
97.在本技术实施例的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可更换连接,或一体地连接,可以是机械连接,也可以是电连接,可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本技术实施例中的具体含义。
98.本技术实施例公开了一种核磁共振兼容液压驱动位置调整平台。
99.请参阅图1以及图2,本技术实施例中提供的一种核磁共振兼容液压驱动位置调整平台的一个实施例包括:
100.平台主体、动力装置以及控制装置;
101.平台主体包括固定架100、第一支撑架200、第二支撑架300、第三支撑架400、第一单作用液压缸501、第二单作用液压缸502以及第三单作用液压缸503;
102.控制装置用于通过动力装置分别控制第一单作用液压缸501、第二单作用液压缸502以及第三单作用液压缸503,应用时,动力装置以及控制装置安置在核磁共振室外;控制装置可以是plc控制装置,具体不做限制。
103.动力装置包括第一动力源、第二动力源600以及第三动力源。
104.第一支撑架200沿z轴方向滑动安装于固定架100上,第一单作用液压缸501用于驱动第一支撑架200运动。而第一动力源包括第一注射器以及第一滚珠丝杆机构,第一注射器与第一单作用液压缸501一一对应,且注射口通过第一导管与第一单作用液压缸501的连通口连通,第一注射器的筒体固定设置,第一滚珠丝杆机构的驱动端与第一注射器连接,用于驱动第一注射器的活塞杆运动。也即是通过第一滚珠丝杆机构来驱动第一注射器的活塞杆运动,进而来给第一单作用缸内的油腔注入油液或从第一单作用缸的油腔中将油液回抽,
从而实现对第一单作用缸的伸缩端的伸缩控制。
105.第二支撑架300沿y轴方向滑动安装于第一支撑架200,第二单作用液压缸502用于驱动第二支撑架300运动。第二动力源600包括第二注射器605以及第二滚珠丝杆机构,第二注射器605与第二单作用液压缸502一一对应,且注射口通过第二导管与第二单作用液压缸502的连通口连通,第二注射器605的筒体固定设置,第二滚珠丝杆机构的驱动端与第二注射器605连接,用于驱动第二注射器605的活塞杆运动。该驱动控制原理与前述的第一驱动机构相同,不做赘述。
106.第三支撑架400沿x轴方向滑动安装于第二支撑架300上,第三单作用液压缸503用于驱动第三支撑架400运动。而第三动力源包括第三注射器以及第三滚珠丝杆机构,第三注射器与第三单作用液压缸503一一对应,且注射口通过第三导管与第三单作用液压缸503的连通口连通,第三注射器的筒体固定设置,第三滚珠丝杆机构的驱动端与第三注射器连接,用于驱动第三注射器的活塞杆运动。该驱动控制原理与前述的第一驱动机构相同,不做赘述。
107.本技术中的各个动力源在使用时,放置在核磁共振室外,通过导管实现与对应的单作用液压缸连接,从而可以避免对mri设备成像质量的影响。应用于穿刺手术时,将穿刺针安装于在该机构的第三支撑架400上,并将机构除动力源的平台部分配置在离病人一定距离的位置,不影响病人进入mri设备即可。等病人就位后,再将穿刺针头定位到病人需要穿刺的部位,避免了医生手动调节穿刺针位置带来的误差,可以大大提升了手术的成功率。
108.从以上技术方案可以看出,本技术基于液压缸模块来构建平台主体能够满足非金属需求,实现平台主体整体非金属设计目的,从而能够具备核磁共振兼容性,能够兼容mri设备或直接应用在mri设备上,进而使得该平台能够应用于穿刺手术中,实现自动化的穿刺,进而有助于提高穿刺稳定性以及准确性,节约手术流程,提高手术效率。而且各个动力源设计为由注射器以及滚珠丝杆机构构建,较于传统的液压泵系统来说更加轻便,使用更加便利。
109.以上为本技术实施例提供的一种核磁共振兼容液压驱动位置调整平台的实施例一,以下为本技术实施例提供的一种核磁共振兼容液压驱动位置调整平台的实施例二,具体请参阅图1至图5。
110.基于上述实施例一的方案:
111.进一步地,就第一滚珠丝杆机构、第二滚珠丝杆机构以及第三滚珠丝杆机构的结构组成来说,均包括如图2所示的安装座601、丝杆604、滑块603以及步进电机602。其中,丝杆604枢接于安装座601,滑块603滑动安装于安装座601,且供丝杆604穿过,丝杆604与滑块603螺纹配合;步进电机602安装于安装座601上,且输出轴与丝杆604连接,用于驱动丝杆604转动。
112.具体的,第一注射器的筒体与第一滚珠丝杆机构的安装座601固定连接。第一注射器的活塞杆与第一滚珠丝杆机构的滑块603连接;第二注射器605的筒体与第二滚珠丝杆机构的安装座601固定连接;第二注射器605的活塞杆与第二滚珠丝杆机构的滑块603连接;第三注射器的筒体与第三滚珠丝杆机构的安装座601固定连接;第三注射器的活塞杆与第三滚珠丝杆机构的滑块603连接。
113.进一步地,如图1以及图2所示,就固定架100的结构组成来说,包括四个固定座
101。四个固定座101呈矩形分布,且顶部分别垂直设有导杆部1011,第一支撑架200包括四个支撑座201以及两个第一导轨202,四个支撑座201一一对应安装于固定座101顶部,且分别设有供对应的导杆部1011穿过的导筒部2011,四个支撑座201两两分成两组,各个第一导轨202分别连接于各组中支撑座201之间,且两个第一导轨202平行设置,第二支撑架300滑动安装于第一导轨202,本领域技术人员可以以此为基础做适当的变换设计,不做限制。
114.对应的,第一单作用液压缸501为四个,四个第一单作用液压缸501一一对应安装于支撑座201顶部,也即是每个且伸缩端向下活动穿出支撑座201并与固定座101连接。如图3所示,在第一单作用液压缸501的伸缩缸伸出时,则带动各个支撑座201上升,而缩回时则带动各个支撑座201下降,从而实现第一支撑架200在z轴方向的位移控制。
115.为了提升控制的精度,还包括第一直线编码器。其中,如图5所示,第一直线编码器包括第一光栅尺701以及第一读头,第一光栅尺701沿第一支撑架200的滑动方向安装于一固定座101,也即是安装在四个固定座101中的一个。而第一读头包括第一读头本体7021、第一发送光纤7022、第一接收光纤7024、第一光源7023、第一光接收器7025;第一读头本体7021安装于与一固定座101对应的支撑座201上且与第一光栅尺701配合;第一光源7023以及第一光接收器7025均安装于第一读头本体7021外,更具体的安装于核磁共振室外,能够减小或避免避免对mri设备成像质量造成影响。再利用第一发送光纤7022一端与第一光源7023连接,另一端与第一读头本体7021连接,实现将第一光源7023发出的光信号传递至第一光栅尺701;而第一接收光纤7024一端与第一光接收器7025连接,另一端与第一读头本体7021连接,用于将穿过第一光栅尺701的光信号传递至第一光接收器7025,再由第一光接收器7025反馈给控制装置计算得到该第一支撑架200在z轴方向的位移。该第一直线编码器能够用于准确地反馈第一支撑架200的滑动位移,以便于连接的控制装置通过控制动力装置以准确地控制第一支撑架200在z轴方向的位移,并且利用光纤实现光信号的传递与接收,能够将光源器件以及光接收器件等外置在核磁共振室外,进一步提高核磁共振兼容性。
116.进一步地,就第二支撑架300的结构组成来说,包括两个第一轴承盒301以及两个第二导轨302。两个第一轴承盒301一一对应地滑动套设于第一导轨202,也即是每个轴承盒对应滑动套设在一个第一导轨202上。而两个第二导轨302连接于两个第一轴承盒301之间,且两个第二导轨302平行间隔设置。
117.同理为提升控制的精度,还包括第二直线编码器。
118.第二直线编码器包括第二光栅尺以及第二读头;第二光栅尺沿第一轴承盒301滑动方向安装于一组支撑座201之间;第二读头包括第二读头本体、第二发送光纤、第二接收光纤、第二光源、第二光接收器;第二读头本体安装在一组支撑座201之间的第一轴承盒301上且与第二光栅尺配合;第二光源以及第二光接收器均安装于第二读头本体外;第二发送光纤一端与第二光源连接,另一端与第二读头本体连接,用于将第二光源发出的光信号传递至第二光栅尺;第二接收光纤一端与第二光接收器连接,另一端与第二读头本体连接,用于将穿过第二光栅尺的光信号传递至第二光接收器。该第二直线编码器的工作原理与前述的第一直线编码器相同,不做赘述。
119.进一步地,为了使得非金属设计更易实现,并保持更加良好的滑动配合。第一轴承盒301设计为包括第一盒体3011、多个第一轴承3013以及多个第一限位柱3012。其中,第一盒体3011设有供第一导轨202穿过的第一通腔,各个第一轴承3013一一对应通过第一限位
柱3012固定于第一通腔内,各个第一轴承3013绕第一导轨202圆周分布,且与第一导轨202滚动接触。通过上述这一结构设计,能够实现滚动摩擦来替代以为的滑动摩擦,大大减小摩擦力,实现更好的滑动配合。首先第一轴承盒301可以是包括多个板围设而成,而各个板之间可以通过碳纤维材料制备的多个第一限位柱3012进行连接,多个第一限位柱3012可以是交错分布,并形成能够供第一导轨202穿过的间隙空间。第一限位柱3012可以通过陶瓷螺丝3014等非金属紧固件进行固定。而第一轴承3013可以为pom塑料轴承,并转动固定在第一限位柱3012上,实现与第一导轨202的外周面进行滚动接触。以第一导轨202为方形导轨为例,第一限位柱3012可以八根,而第一轴承3013可以是十六个,每个第一限位柱3012上套设两个第一轴承3013,本领域技术人员可以以此为基础做适当的变换设计,不做限制。本技术中前述的导筒部2011亦可参考第一轴承盒301的结构进行设计,具体不做限制。
120.进一步地,以具有两个第一轴承盒301设计为例,第二单作用液压缸502为四个。四个第二单作用液压缸502分别一一对应安装于支撑座201,且两两分成两组,也即是每两个第二单作用液压缸502组成一组。
121.各组中的两个第二单作用液压缸502的伸缩端相向设置,且与第一轴承盒301连接;也即是每组中的两个单作用液压缸对称设置并连接一个第一轴承盒301。由两个第二单作用液压缸502来实现对第二支撑架300的的控制,能够一定程度的增大对第二支支撑架的位移控制范围。
122.对应的,第二动力源600中的第二滚珠丝杆机构为两个,而第二注射器605则为四个。四个第二注射器605两两分成两组,各组第二注射器605与第二滚珠丝杆机构一一对应,也即是每两个第二注射器605为一组并与对应的一组第二单作用液压缸502连接,并由一个第二滚珠丝杆机构驱动。各组中的两个第二注射器605的注水后相背离设置,第二滚珠丝杆机构用于一同驱动对应的一组中的两个第二注射器605的活塞杆。这样对于每组中的两个第二单作用液压缸502的控制可以是其中的一个第二单作用液压缸502为注入油液而处于伸出状态时,另一个第二单作用液压缸502则为抽取油液而处于缩回状态,也即是利用一台第二滚珠丝杆机构同步控制两个第二注射器605注油以及抽油,也即是使得第二轴承盒401处于被一个活塞杆推动的同时被另一个活塞杆拉动,实现更加平稳的运动控制。
123.进一步地,第三支撑架400包括两个第二轴承盒401。两个第二轴承盒401一一对应地滑动套设于第二导轨302。第三支架还可以包括用于安装穿刺针的针座等,具体不做限制。
124.进一步地,第三单作用液压缸503安装于两个第二轴承盒401之间,且伸缩端与一第一轴承盒301连接,第三单作用液压缸503伸缩运动即可带动第一轴承盒301沿x轴方向运动。将第三单作用液压缸503安装于第二轴承盒401之间可以整体结构更加紧凑。
125.进一步地,第二轴承盒401包括第二盒体、多个第二轴承以及多个第二限位柱,第二盒体设有供第二导轨302穿过的第二通腔;各个第二轴承一一对应通过第二限位柱固定于第二通腔内,各个第二轴承绕第二导轨302圆周分布,且与第二导轨302滚动接触。该第二轴承盒401的结构设计与前述第一轴承盒301的结构设计相似,原理相同,盒体结构可以根据实际需要而进行适当变换设计,具体不做赘述。
126.进一步地,还包括第三直线编码器。第三直线编码器包括第三光栅尺以及第三读头,第三光栅尺沿第二轴承盒401滑动方向安装于一第二导轨302的旁侧,第三读头包括第
三读头本体、第三发送光纤、第三接收光纤、第三光源、第三光接收器。而第三读头本体安装于一第二轴承盒401上且与第三光栅尺配合,第三光源以及第三光接收器均安装于第三读头本体外,第三发送光纤一端与第三光源连接,另一端与第三读头本体连接,用于将第三光源发出的光信号传递至第三光栅尺,第三接收光纤一端与第三光接收器连接,另一端与第三读头本体连接,用于将穿过第三光栅尺的光信号传递至第三光接收器。该第三直线编码器的工作原理与前述的第一直线编码器相同,不做赘述。
127.以上对本技术所提供的一种核磁共振兼容液压驱动位置调整平台进行了详细介绍,对于本领域的一般技术人员,依据本技术实施例的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本技术的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。