1.本发明属于空间导航控制技术领域,具体涉及一种电磁制动协同机构自锁定的导航惯组转位锁紧机构。
背景技术:
2.导弹从装配完成到发射前,都要对其进行自标校,以确保其中导航惯组测试数据误差更小,飞行方向更精确。惯组转位/锁紧机构是控制导航惯组自标校系统的重要部件,其作用是控制导航惯组按照标校要求进行规定角度的转动和指定位置的锁定。随着空间导航控制技术的广泛应用,目前导航控制系统向更高精度,更小尺寸以及轻量化的方向发展。
3.惯组转位/锁紧机构有三种工作状态:定位状态、转动状态及锁定(飞行)状态,其中最关键的是锁定(飞行)状态,也是惯组转位/锁紧机构的常态,导航惯组自标校完成后即维持该状态。该状态下需保证机构中的导航惯组在振动、冲击和离心等环境相对角度和相对位移不发生变化,确保飞行方向精确。
4.公开号为cn109631879a的中国专利公开了一项名称为一种正交锁紧的双轴转位机构的技术方案,所述双轴转位机构利用锁紧电机协同锁紧齿盘的正交锁紧、刚性捷联的方案,并被应用于导航惯组中。锁紧齿盘这种连接方式虽然锁紧力较大,较好地保证了导航惯组的稳定,但是实际上,该种设计方案存在以下不足:
5.1)在长时间存储及运输中,机构出现较多齿盘卡死的现象。当导航惯组再次测试时机构无法恢复转动状态,导致不能完成其自标校过程,故障率较高;
6.2)测试装置即读取导航惯组相对角度的编码器安装于轴一侧,与惯组间存在一定距离,读取的参数存在一定的误差。且角度编码器为一整体结构,内部存在如轴承等多个部件连接,在振动、冲击和离心等环境下测试误差会增大,从而降低整个机构的测试精度;
7.3)机构在定位状态、转动状态和锁定(飞行)状态之间不能自由切换,降低了测试效率。
技术实现要素:
8.本发明的目的在于提出一种电磁制动协同机构自锁定的导航惯组转位锁紧机构,解决现有技术存在的机构齿盘卡死无法继续测试,故障率较高、机构测试误差较大以及机构状态无法自由切换、测试效率较低的问题。
9.为实现上述目的,本发明的一种电磁制动协同机构自锁定的导航惯组转位锁紧机构包括:
10.机构框架;
11.位于所述机构框架内相对所述机构框架转动配合的传动轴系,所述传动轴系至少包括同轴依次设置的第一传动锁紧轴、中空轴以及第二传动锁紧轴;
12.和所述第一传动锁紧轴的端部连接的驱动自锁定装置,通过所述驱动自锁定装置实现驱动自锁以及传动轴系的转动驱动;
13.和所述第二传动锁紧轴的端部连接的电磁制动装置,通过所述电磁制动装置对所述传动轴系进行制动;
14.以及高精度分体测试装置,通过所述高精度分体测试装置测量位于中空轴内的导航惯组的角度变化。
15.所述机构框架中间位置上下对称设置有开口,所述机构框架的外表面设置有第三轻量化凹槽;所述传动轴系的中空轴径向对应位置从所述机构框架的上下对称设置的开口伸出。
16.所述机构框架还包括:
17.驱动密封盖,所述驱动密封盖和所述机构框架靠近驱动自锁定装置的一端配合密封;
18.以及制动密封盖,所述制动密封盖和所述机构框架靠近电磁制动装置的一端配合密封。
19.所述传动轴系还包括:
20.中空轴盖,所述中空轴相对机构外框伸出位置对称设置有开口,所述中空轴盖和所述中空轴开口处配合;
21.双角接触球轴承,所述第一传动锁紧轴通过所述双角接触球轴承和所述机构外框转动配合;所述第二传动锁紧轴通过所述双角接触球轴承或单角接触球轴承和所述机构外框转动配合;
22.以及测试密封盖,所述测试密封盖位于所述第一传动锁紧轴远离中空轴一端,所述测试密封盖和所述机构框架内部连接。
23.所述中空轴以及中空轴盖整体外表面为圆柱面,所述中空轴和所述中空轴盖整体外表面圆周均布多个第一轻量化凹槽,所述中空轴和所述中空轴盖整体外表面轴向方向均匀分布两排第二轻量化凹槽;相邻两个所述第一轻量化凹槽对应的圆心角为30
°
。
24.所述传动轴系的材料为2cr13。
25.所述驱动自锁定装置包括:
26.固定在所述机构框架内部的蜗杆箱;
27.位于所述蜗杆箱内的驱动蜗杆轴,所述驱动蜗杆轴两端通过转动轴承和所述蜗杆箱配合;
28.设置在所述驱动蜗杆轴一端的轴承压盖;
29.通过所述电机支架设置在所述蜗杆箱上的高精度驱动电机,所述高精度驱动电机通过联轴器和所述驱动蜗杆轴另一端连接;
30.以及蜗轮,所述蜗轮设置在所述第一传动锁紧轴端部,所述蜗轮和所述驱动蜗杆轴配合。
31.所述蜗轮材料为锡青铜。
32.所述电磁制动装置包括:
33.转接盘,所述转接盘内圈和所述第二传动锁紧轴固定连接;
34.位于转接盘外侧并和所述转接盘连接的弹性垫片;
35.位于所述弹性垫片外侧的制动盘,所述制动盘和所述弹性垫片固定连接,所述制动盘和所述弹性垫片整体和所述转接盘的外圈连接;
36.以及位于所述制动盘外侧的永磁体失电制动器,所述永磁体失电制动器固定在所述机构外框内,所述永磁体失电制动器和所述制动盘之间留有间隙。
37.所述高精度分体测试装置包括设置在所述第一传动锁紧轴或第二传动锁紧轴靠近中空轴一端的光栅组件以及安装在机构框架上发光组件和接收组件;所述发光组件发出的光透过光栅组件得到的码值进入接收组件。
38.本发明的有益效果为:
39.1)采用分体式轴系设计,使整个回转轴系更利于加工及装配,且可在保证回转轴系刚度的同时建立更好的基准,提高传动和测试精度;中空轴设计可实现导航惯组的快速安装及拆卸,提高装配和测试效率;设计了中空轴盖,通过增大横截面积提升回转轴系刚度,减小因轴系发生弹性变形影响测试精度;通过计算转动惯量,在回转轴系上设置了多级结构的轻量化凹槽,在保证刚度的同时有效地降低机构的总体重量和驱动所需力矩。
40.2)采用背对背安装的双角接触球轴承应用于惯组转位/锁紧机构中,可减小轴承游隙,提升机构转动精度和轴承刚度。
41.3)采用电磁制动协同机构自锁定功能的锁紧方案:轴系一端安装永磁体失电制动装置,具有较强的制动力矩及较好的稳定性,连接环节少,且装置刚度高,锁紧效果极佳。并且响应速度极快,可实现导航惯组转位/锁紧状态的快速无级切换;轴系另一端安装涡轮蜗杆机构,更有效地缩小了该机构的外包络尺寸,且涡轮蜗杆机构本身具有自锁定功能;电磁制动和机构自锁定制动分别从轴系两侧作用,大大提升了该机构的锁定性能,提升导航惯组的测试稳定性。
42.4)采用分体式测试装置,距离导航惯组更近,组件简单且刚度很高,可更有效地减少测试误差,尤其是振动、冲击和离心等环境下的测试误差,进而提升整个惯组转位/锁紧机构的测试精度。
附图说明
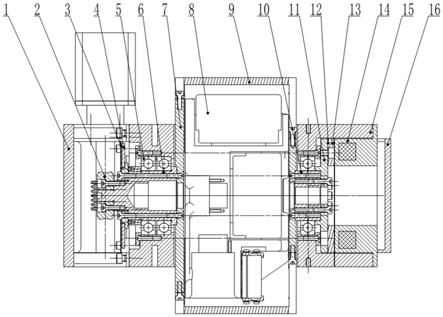
43.图1为本发明的一种电磁制动协同机构自锁定的导航惯组转位锁紧机构轴向剖视图;
44.图2为本发明的一种电磁制动协同机构自锁定的导航惯组转位锁紧机构的蜗轮蜗杆驱动自锁定装置剖视图;
45.图3为本发明的一种电磁制动协同机构自锁定的导航惯组转位锁紧机构的高精度分体测试装置;
46.图4为本发明的一种电磁制动协同机构自锁定的导航惯组转位锁紧机构的轻量化示意图;
47.其中:1、驱动密封盖;2、驱动自锁定装置:201、蜗杆箱,202、轴承压盖,203、驱动蜗杆轴,204、转动轴承,205、联轴器,206、高精度驱动电机,207、电机支架,208、蜗轮;3、测试密封盖;4、高精度分体测试装置:401、光栅组件,402、发光组件,403、接收组件;5、双角接触球轴承;6、第一传动锁紧轴;7、中空轴;701、第一轻量化槽;8、导航惯组;9、中空轴盖;901、第二轻量化槽;10、第二传动锁紧轴;11、转接盘;12、弹性垫片;13、制动盘;14、永磁体失电制动器;15、机构框架;1501、第三轻量化槽;16、制动密封盖。
具体实施方式
48.下面结合附图对本发明的实施方式作进一步说明。
49.参见图1
‑
图4,本发明的一种电磁制动协同机构自锁定的导航惯组8转位锁紧机构包括:
50.机构框架15;
51.位于所述机构框架15内相对所述机构框架15转动配合的传动轴系,所述传动轴系至少包括同轴依次设置的第一传动锁紧轴6、中空轴7以及第二传动锁紧轴10;
52.和所述第一传动锁紧轴6的端部连接的驱动自锁定装置2,通过所述驱动自锁定装置2实现驱动自锁以及传动轴系的转动驱动;
53.和所述第二传动锁紧轴10的端部连接的电磁制动装置,通过所述电磁制动装置对所述传动轴系进行制动;
54.以及高精度分体测试装置4,通过所述高精度分体测试装置4测量位于中空轴7内的导航惯组8的角度变化。
55.所述机构框架15中间位置上下对称设置有开口,所述机构框架15的外表面设置有第三轻量化凹槽1501;所述传动轴系的中空轴7径向对应位置从所述机构框架15的上下对称设置的开口伸出。
56.所述机构框架15还包括:
57.驱动密封盖1,所述驱动密封盖1和所述机构框架15靠近驱动自锁定装置2的一端配合密封;
58.以及制动密封盖16,所述制动密封盖16和所述机构框架15靠近电磁制动装置的一端配合密封。
59.所述的机构框架15为整体式框架,机构框架15对外接口固定于导航系统中,对内其他组件均安装于机构框架15上,并设置轻量化凹槽。所述的传动轴系包括安装导航惯组8的中空轴7、第一传动锁紧轴6、第二传动锁紧轴10以及中空轴盖9。中空轴7中空部分尺寸根据导航惯组8外形尺寸设计,中空轴7外形轮廓尺寸根据轴系回转尺寸设计,该种设计方法可使导航惯组8自由完成安装和拆卸过程,避免导航惯组8检修过程拆卸整个轴系。中空轴7与两侧的第一传动锁紧轴6和第二传动锁紧轴10连接,通过带动两侧第一传动锁紧轴6和第二传动锁紧轴10,进而控制导航惯组8的转位和锁紧。安装完导航惯组8后,将上下两片中空轴盖9合上,使安装导航惯组8的轴系部分形成一整个圆柱形状,通过提高轴系的横截面积,进而提升中空轴7刚度,减小其在振动等过程种发生弹性变形的可能,提升导航惯组8的测试精度。此外,为了更好的满足轻量化的需求,通过计算整个轴系的转动惯量,将中空轴7和中空轴盖9圆周方向每隔30
°
设置一处轻量化凹槽,轴向方向均匀设置两排轻量化凹槽,该种设计可保证轴系刚度的同时,有效地降低机构的总体重量和驱动所需力矩。所述的双角接触球轴承5为背对背配对安装的专用角接触球轴承,可减小轴承游隙,提升转动精度和轴承刚度。
60.所述传动轴系还包括:
61.中空轴盖9,所述中空轴7相对机构外框伸出位置对称设置有开口,所述中空轴盖9和所述中空轴7开口处配合;
62.双角接触球轴承5,所述第一传动锁紧轴6通过所述双角接触球轴承5和所述机构
外框转动配合;所述第二传动锁紧轴10通过所述双角接触球轴承5或单角接触球轴承和所述机构外框转动配合;
63.以及测试密封盖3,所述测试密封盖3位于所述第一传动锁紧轴6远离中空轴7一端,所述测试密封盖3和所述机构框架15内部连接。
64.所述中空轴7以及中空轴盖9整体外表面为圆柱面,所述中空轴7和所述中空轴盖9整体外表面圆周均布多个第一轻量化凹槽701,所述中空轴7和所述中空轴盖9整体外表面轴向方向均匀分布两排第二轻量化凹槽901;相邻两个所述第一轻量化凹槽701对应的圆心角为30
°
。
65.安装传动轴系和转动轴承204的安装孔均可保证较高的同轴度和其他精度。其中配合关系采用过盈配合,以减小间隙,增大整个机构的刚度。此外,框架外侧非精加工面设置了多个轻量化凹槽,以减轻机构重量。所述的传动轴系安装时,将中空轴7从机构框架15上侧或下侧开口处放入,然后将两侧第一传动锁紧轴6和第二传动锁紧轴10分别从机构框架15左右两端装入,配合关系采用过盈配合。将轴系定位好后,使用圆周均匀分布的八个埋头螺钉将中空轴7和两侧第一传动锁紧轴6和第二传动锁紧轴10固定,使分体轴系形成一个整体以提升轴系刚度,增强抗振性能。然后在两侧分别装入背对背双角接触轴承以及同尺寸对应角接触轴承,轴承通过轴肩定位,并通过修整轴承压盖202消除角接触轴承游隙,进而完成传动轴系的装配。整体式框架和安装导航惯组8的回转轴系均设置了轻量化凹槽,以满足转位机构轻量化的需求。
66.所述驱动自锁定装置2包括:
67.固定在所述机构框架15内部的蜗杆箱201;
68.位于所述蜗杆箱201内的驱动蜗杆轴203,所述驱动蜗杆轴203两端通过转动轴承204和所述蜗杆箱201配合;
69.设置在所述驱动蜗杆轴203一端的轴承压盖202;
70.通过所述电机支架207设置在所述蜗杆箱201上的高精度驱动电机206,所述高精度驱动电机206通过联轴器205和所述驱动蜗杆轴203另一端连接;
71.以及蜗轮208,所述蜗轮208设置在所述第一传动锁紧轴6端部,所述蜗轮208和所述驱动蜗杆轴203配合。
72.所述的驱动自锁定装置2除蜗轮208外其他零件均装配于蜗杆箱201中,蜗杆箱201固定于机构框架15,蜗轮208装配于第一传动锁紧轴6或第二传动锁紧轴10一端。采用蜗轮蜗杆驱动方案可将驱动方向由轴向转移至与轴向正交的方向,避免电机直驱增大轴向尺寸,更有效地缩小了该机构的外包络,满足导航惯组8转位机构小型化的要求。此外,蜗轮蜗杆机构具有自锁的性能,采用该种方案也可增大该机构的锁紧能力。
73.所述驱动自锁定装置2组件的蜗轮208中心与第一传动锁紧轴6或第二传动锁紧轴10采用过盈配合,并使用圆周均匀分布的六个螺钉固定,其他零件均装配于蜗杆箱201中。蜗杆箱201与机构框架15连接,其连接部分采用腰型孔设计,可通过改变蜗杆箱201左右安装位置,控制驱动蜗杆轴203和蜗轮208的啮合间隙,以提高传动精度。该蜗轮蜗杆机构既具备传动功能,并且其自锁定性能又可在导航惯组8转位/锁紧机构一端锁紧机构。此外,为了避免蜗轮蜗杆驱动/自锁定装置组件受到污染,在外侧设置驱动密封盖1。
74.所述电磁制动装置包括:
75.转接盘11,所述转接盘11内圈和所述第二传动锁紧轴10固定连接;
76.位于转接盘11外侧并和所述转接盘11连接的弹性垫片12;
77.位于所述弹性垫片12外侧的制动盘13,所述制动盘13和所述弹性垫片12固定连接,所述制动盘13和所述弹性垫片12整体和所述转接盘11的外圈连接;
78.以及位于所述制动盘13外侧的永磁体失电制动器14,所述永磁体失电制动器14固定在所述机构外框内,所述永磁体失电制动器14和所述制动盘13之间留有间隙。这里的间隙根据制动力矩进行确定,制动力矩为20nm的永磁体失电制动器14所需间隙为0.25mm~0.35mm。
79.所述电磁制动装置转接盘11内圈与第二传动锁紧轴10通过螺钉连接,弹性垫片12固连于制动盘13上,二者共同通过螺钉与转接盘11外圈相连。所述的电磁制动装置的永磁体失电制动器14固定于机构框架15,弹性垫片12安装于制动盘13上,制动盘13通过弹性垫片12转接固定于第二传动锁紧轴10一端。通过t=jω计算,其中t为轴系锁紧所需力矩,j为轴系安装导航惯组8后的转动惯量,ω为轴系的角加速度,再乘以3~5倍的安全系数,即可计算出永磁体失电制动器14所需提供的制动力矩。安装时,制动盘13与永磁体失电制动器14间存在一定间隙,该间隙通过调整永磁体失电制动器14与机构框架15连接处的垫片厚度调整。当永磁体失电制动器14常规状态下未通电时,永磁体失电制动器14具有较强的吸力,由于弹性垫片12发生弹性变形弥补了制动盘13与永磁体失电制动器14的间隙,致使制动盘13被永磁体失电制动器14完全吸住,形成较强的制动效果,永磁体失电制动器14的吸附力和制动盘13的摩擦力共同形成较强的制动效果,将整个轴系(导航惯组8)完全锁紧。可将整个轴系完全锁紧。永磁体失电制动器14中间存在线圈,当导航惯组8测试机构需要转动时,将永磁体失电制动器14通电,通电线圈产生的磁力克服了永磁体的作用力,制动盘13在弹性垫片12变形产生的弹性力作用下与永磁体失电制动器14松开,致使传动轴系完全释放,即刻恢复转位状态。该种电磁制动装置通过永磁体强大的吸附力和制动盘13的摩擦力为传动轴系提供较强的制动力矩,且具有较好的稳定性,锁紧效果极佳。并且响应速度极快,可实现导航惯组8转位/锁紧状态的快速无级切换。制动盘13与永磁体失电制动器14的间隙可通过电磁线圈通电后克服永磁体的制动力和弹性垫片12的弹性模量e计算。该种电磁制动装置结构简单,连接环节少,无弹簧等不稳定组件,刚度较高,可保证在振动等恶劣环境下的锁紧能力。该种电磁制动装置具有较强的制动力矩及较好的稳定性,锁紧效果极佳。并且响应速度极快,可实现导航惯组8转位/锁紧状态的快速无级切换。此外,连接整个电磁制动装置安装于蜗轮蜗杆驱动/自锁定装置相反一侧,两者分布于导航惯组8的两端协同作用进一步提升该机构的锁紧能力。
80.所述高精度分体测试装置4包括设置在所述第一传动锁紧轴6或第二传动锁紧轴10靠近中空轴7一端的光栅组件401以及安装在机构框架15上发光组件402和接收组件403;所述发光组件402发出的光透过光栅组件401得到的码值进入接收组件403。
81.所述的高精度分体测试装置4光栅组件401安装于第一传动锁紧轴6或第二传动锁紧轴10轴肩上,使用圆周均匀分布的八个螺钉固定,并靠近安装导航惯组8的中空轴7,更好地反应导航惯组8的角度变化,发光组件402和接收组件403安装于框架上。光栅组件401夹于发光组件402和接收组件403之间,发光组件402发出的光透过光栅组件401得到的码值进入接收组件403,进而可读取轴系与框架的相对角度变化关系。该种测试装置具有分体式结
构,组件简单,该种方案减小了测试装置组件多,结构复杂的弊端,光栅组件401和测试组件分别刚性连接于轴系和框架,使整个装置刚度很高,可更有效地减少测试误差,尤其是振动、冲击和离心等环境下的测试误差,进而提升整个导航惯组8转位锁紧机构的测试精度。此外,为了保护光栅组件401的洁净度,在光栅组件401外设置测试密封盖3,降低光栅组件401受到污染的可能。
82.本发明的材料选择应同时满足轻量化和高强度的要求。传动轴系部分采用耐磨性能较好、强度较高的2cr13材料,在满足强度要求的同时尽量多布置轻量化凹槽;蜗轮208选用锡青铜材料;其余部件均采用机械性能较好、密度较小的铝合金材料。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。