1.本实用新型属于垃圾分类回收领域,尤其是涉及一种全自动垃圾分类回收装置。
背景技术:
2.在机场、火车站、购物中心等大型公共场所,目前缺少合理化的设计将垃圾分类回收工作的各个环节对应的功能集于一体。由于垃圾分类回收工作涉及分类投放、分类收集、分类运输、分类处理等数个环节,不能只强调其中某一个或几个环节,必须把整个体系建设起来,形成一个闭环体系才能有效运行。再加上提高使用者对垃圾投放舒适度和垃圾分类投放教育的需求,一种可以引导投放者正确进行垃圾分类、自动进行垃圾收集、自动运输、自动分类倾倒的全自动垃圾分类回收装置亟需被设计、生产和使用。
技术实现要素:
3.本实用新型要解决的问题是提供一种集寻迹移动、自动倾倒、语音交互、物体检测功能为一体的全自动垃圾分类回收装置。
4.为解决上述技术问题,本实用新型采用的技术方案是:一种全自动垃圾分类回收装置,包括回收小车和部署于使用场所的黑线轨道,
5.回收小车设置有控制主板和与控制主板相连的直流电机、车体红外线传感器和电源模块,用于沿黑线轨道运动来分类收集垃圾,车体红外线传感器除了做寻迹之用,还用于检测黑线轨道路径上设置的检测点以获得与自动倾倒功能相关的信号;
6.回收小车上安装有桶体,桶体的四个侧面均设置有超声波测距传感器,超声波测距传感器与控制主板相连,用以停车控制,以检测将要通过语音交互分类投放垃圾而接近装置的人和装置行进前方的障碍,回收小车通过红外寻迹的方法来实现按规定黑线轨道运动,
7.在一条黑线轨道只放置一个回收小车的情况下,超声波测距传感器有两种情形可使回收小车停车,一是用超声测距的方法来检测前方障碍物,从而实现停车等待障碍消失的功能,待障碍消失后,恢复运动,二是当超声波测距传感器检测到在回收小车四周设定范围内有投放者出现要投放垃圾即停车,使用语音交互指导其正确投放完毕后,则恢复运动。
8.该桶体设置有四个桶腔,四个桶腔正面上方分别开设有通过舵机控制的投放口,当语音交互模块发送某一桶腔的开盖信号后,控制主板控制舵机转动,投放口打开,考虑到安全问题,待投放动作完毕后延迟一小段时间后,舵机再次转动,控制投放口关闭;
9.四个桶腔后面下方分别开设有通过舵机控制的倾倒口,当控制主板控制某个舵机运动时,对应已经装满垃圾的某个或多个桶腔的垃圾倾倒口打开倾倒垃圾,在倾倒完毕后延迟一小段时间,舵机再次转动,控制倾倒口关闭。
10.四个桶腔内部上方分别设置腔体红外线传感器以检测四个桶腔是否已满,检测到已满后,对应腔体红外线传感器向控制主板发送信号。
11.桶体顶部设置的语音交互模块根据垃圾名称向控制主板发送信号以控制对应投
放口的舵机转动,另外语音交互模块还可在桶腔已满之后告知投放者暂不能投放以及在路线上障碍久未消除时做出语音提醒。
12.黑线轨道上在自动倾倒区附近设有能够被车体红外线传感器识别到的检测点,回收小车只有在自动倾倒区处识别到检测点后,才触发腔体红外线传感器以检验各桶腔内垃圾堆积的高度;若有桶腔内的垃圾堆积到规定高度以上,则回收小车在此处停车,并倾倒已满桶腔内的垃圾,然后继续运动,若所有垃圾桶体内的垃圾均未堆积到指定高度,即使识别到检测点也不会停车,回收小车路过自动倾倒区继续运行。
13.黑线轨道上可以放置多个回收小车同时运转,每个回收小车桶腔的四个侧面均在中间位置设置超声波测距传感器,若两回收小车运行至同一位置且两回收小车上的超声波测距传感器测得的距离均小于设定安全距离,执行如下设定:沿行进方向位于后方的回收小车停车等待一小段时间,待与前方装置拉开一定距离后再进行移动。
14.与现有技术相比,本实用新型有益效果在于:本实用新型可应用于智慧社区建设,适用于机场、车站等一些公共场所,具有寻迹移动功能,能够在公共场所内沿固定路线巡回移动;具有检验已满功能,能够检测垃圾桶体是否装满垃圾;具有自动倾倒功能,能够在垃圾桶体被填满时自动检测布置于移动路径上的自动倾倒点并倾倒垃圾;具有障碍物检测功能,能够在移动过程中遇到的障碍物前停下,等待其消失后再恢复运行;具有语音交互功能,能够据使用者的语音识别垃圾种类,并打开对应投放口和做出系列语音回应,实现垃圾分类回收。
15.本实用新型将垃圾分类处理的各个环节结合起来作为功能实现的目标,实现完善的自动化、整体化,并且设置方式可因地制宜,黑线轨道因需而铺设,每个黑线轨道上装置的数量因需求而设置且装置之间会通过配合不会相互干扰。
附图说明
16.下面通过参考附图并结合实例具体地描述本实用新型,本实用新型的优点和实现方式将会更加明显,其中附图所示内容仅用于对本实用新型的解释说明,而不构成对本实用新型的任何意义上的限制,在附图中:
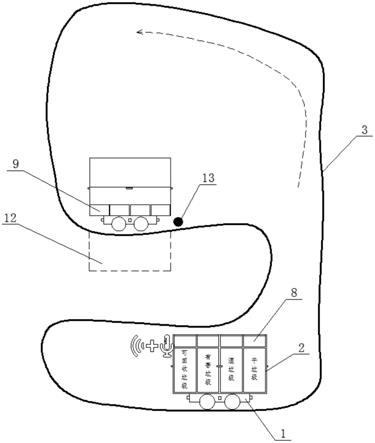
17.图1是本实用新型的工作流程示意图
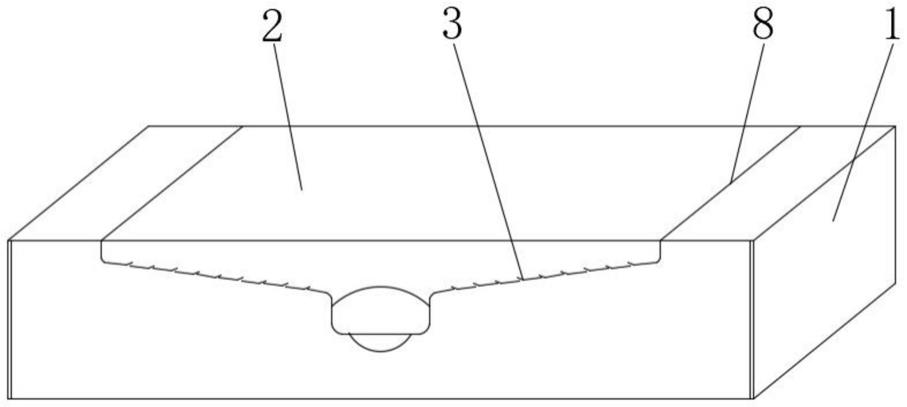
18.图2是本实用新型回收小车的主视图
19.图3是本实用新型回收小车的后视图
20.图4是本实用新型控制系统的结构框图
21.图5是本实用新型工作流程框图
22.图中:
23.1、回收小车
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2、桶体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
3、黑线轨道
24.4、控制主板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
5、电源模块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
6、车体红外线传感器
25.7、直流电机
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
8、投放口
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
9、倾倒口
26.10、腔体红外线传感器 11、语音交互模块
ꢀꢀꢀꢀ
12、自动倾倒区
27.13、检测点
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
14、超声波测距传感器
具体实施方式
28.如图1至图5所示,本实用新型一种全自动垃圾分类回收装置,包括回收小车1,回收小车1上安装的桶体2和部署于使用场所的黑线轨道3,工作流程如图1所示。
29.关于本实用新型的结构与控制系统,回收小车1搭载标注“干垃圾”、“湿垃圾”、“可回收垃圾”、“有害垃圾”的四个桶腔运行在部署于使用场所的黑线轨道3上,回收小车1的结构如图2至图4所示,回收小车1中部设置有控制主板4和电源模块5,本实用新型采用stm32为控制主板4,电源模块5位直流电源,控制主板4由大容量直流电源供电。
30.回收小车1的前端设置五路车体红外线传感器6,并与控制主板4和直流电源连接;回收小车1的侧面设置一路车体红外传感器6,并与控制主板和直流电源连接;回收小车1的运动由直流电机7和直流电机驱动模块l298n控制,它们与控制主板4和直流电源连接。
31.桶体2的可见侧面中部均置超声波测距传感器14,共十个,它们与控制主4板和直流电源连接。
32.四个桶腔正面上方分别开设有通过舵机控制的投放口8,舵机位于投放口上方,驱动投放口8挡板,并与控制主板4和直流电源连接;四个桶腔后面下方分别开设有通过舵机控制的倾倒口9,舵机位于倾倒口上方,驱动倾倒口9挡板,并与控制主板4和直流电源连接;桶腔内部下方均设置为斜面,斜面下端与倾倒口9下沿平齐;桶腔内部上方分别设置腔体红外线传感器10,腔体红外线传感器10位于各个桶腔内部的顶部中心位置,并与控制主板4和直流电源连接;桶体2顶部设置一个语音交互模块11,该语音交互模块11与控制主板4和无线电源连接。
33.黑线轨道3沿途设置有自动倾倒区12,自动倾倒区12附近设黑色检测点13,黑线轨道3宽度位于1.5厘米到3厘米之间,自动倾倒区12尺寸和不同种类垃圾的隔断设计以倾倒时垃圾的掉落范围为标准设定。
34.上述实用新型的结构所实现的功能之间的主体逻辑如图5所示,其工作流程为:
35.首先需人为于使用该设施的公共场所铺设黑线轨道3,在黑线轨道3沿线的合适位置布置自动倾倒区12以及黑色检测点13,自动倾倒区12和黑色检测点13可设置多个。
36.将一个或多个回收小车1按顺序放置于黑线轨道3上并开启电源开关,如果是多个回收小车1,则设置于回收小车1上的超声波测距传感器14会相互感应到相邻回收小车1的存在,此时回收小车1上的超声波测距传感器14测得的距离均小于设定安全距离,沿行进方向的第一个回收小车1先投入工作,剩余回收小车待前方回收小车开始运转后延迟一小段时间后依次陆续开始运转。
37.回收小车停止运动的条件有四项:一,回收小车检测行进方向物体的超声波测距传感器14检测到行进前方遇到障碍,则立即停车等待,直至障碍消失后恢复运动;二,回收小车的十个超声波测距传感器14中任一传感器检测到距离小于设定距离则停止运动,原因是此时可能出现了靠近设施投放垃圾的人,待引导投放者正确分类投放且投放者远离后,检测的距离大于设定距离,回收小车再次恢复运动;三,回收小车的语音交互模块11检测到有投放者呼唤“垃圾桶”、“垃圾箱”等口令后,则语音系统向控制主板4发送信号使得回收小车停车,待引导投放者正确分类投放后,投放者远离,回收小车恢复运动;四,进行自动倾倒垃圾时。
38.回收小车的自动倾倒功能需在检测点13处触发,在行进过程中,回收小车1上所设
的一路车体红外线传感器6会时刻识别有无检测点出现,出现检测点13时,若分别位于桶腔内部顶部的四个腔体红外线传感器10中任一检测到有桶腔已满则在自动倾倒区停车,之后已满桶腔后侧下方位置的舵机转动,相应的倾倒口9挡板掀开,进行垃圾倾倒,延迟一段时间后,倾倒口9挡板在舵机的带动下落下,回收小车1继续沿黑线轨道3运行。
39.回收小车1的语音交互模块11除具有引导投放者分类投放垃圾的作用外,还可实现:在行进途中遇到障碍物,障碍物久未消失时做出“请移除前方物品”的语音提示;在因回收小车的十个超声波测距传感器14中任一检测到距离小于设定距离而停止运动一段时间后,未检测到交互语音口令时做出“请问您是否要投放垃圾呢”的询问;在通过交互识别出投放者所说的垃圾属于何种类别,但这一类别的桶腔已满时,语音交互模块11做出“该桶腔暂时已满,请稍后或等待其它装置到来”的语音提示。
40.回收小车1的停机,使用者接近回收小车1上的十个超声波测距传感器14中总会有一个检测的距离小于设定距离,此时回收小车1会停止运行,之后将电源关闭即可收回回收小车1进行充电或清理工作。
41.本实用新型最大的优点在于将垃圾分类处理的各个环节结合起来作为功能实现的目标,实现完善的自动化、整体化,并且设置方式可因地制宜,黑线轨道因需而铺设,一轨线上装置的数量因需求而设置且装置之间会通过配合不会相互干扰,除此之外,本实用新型可一键式启动和关闭,使用便捷。
42.以上对本实用新型的实施例进行了详细说明,但所述内容仅为本实用新型的较佳实施例,不能被认为用于限定本实用新型的实施范围。凡依本实用新型范围所作的均等变化与改进等,均应仍归属于本专利涵盖范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。